







第8章 库函数
8.1 数学相关
- 使用数学函数的时候,大多数需要包含头文件
<math.h>,但是也有特例,例如处理整型数的函数abs函数被包含在<stdlib.h>头文件中 - 三角函数和反三角函数,都以弧度为参数,而不是以角度为参数。
- 更加详细的数学函数可以参考
C mathematical functions。-维基百科<math.h>
8.2 字符串相关
- strcpy、strcat函数会改变传入的字符串的内容。程序员需要确保传入的地址有足够的空间容纳改变后的字符串。也就是说strcpy、strcat函数对传入的空间不做容量检查。一不小心就是发生溢出。
- 为了解决字符串函数的溢出问题,引进了strncpy、strncat两个函数。例如有如下例子:
#include<stdio.h>
int main()
{
char str[8]={"WORLD!"};
char des[10]={"HELLO"};
strncat(des,str);
}利用strncat函数,我们可以调用strncat函数strncat(des,str,4)这一语句,这个函数从str中取出前4个字符链接到des的后边,des字符串成为”HELLOWOR”,最后还有一个’\0’作为字符串结尾。
8.4 时间函数
<time.h>
一个中心,两个基本点
一个中心:time_t time(time_t *timer)函数
两个基本点:系统时间time_t( 从1970.1.1日0时0分0秒到当前一刻所经过的秒数)和日历时间struct tm 。(分别表示的年月日时分秒等)
时间函数演示程序:
#include<stdio.h>
#include<time.h>
int main()
{
char a[100];
time_t now;
time(&now);/*或者now=time(NULL)*/
printf("%s",ctime(&now));//利用time函数返回构建表达式
printf("%d",time(NULL)+60*60*24*7);
strftime(a,100,"%d-%m-%y",localtime(&now));
printf("%s",a);
}8.5 随机数
利用时间函数设置随机数种子,srand(time(NULL))
例,产生100个0到1之间的随机数的程序:
int main()
{
srand(time(NULL));
int i,ran_int;
float ran_float;
for(int i=0;i<100;i++)
{
ran_int=rand();
ran_float=float(ran_int)/RAND_MAX;
printf("%f/n",ran_float);
}
}8.7 库函数使用建议
熟悉标准函数库中的函数。
参考:The C Library Reference Guide
第9章 数组
9.1 基本知识
对于数组 int array[3],有
1. 数组变量array即是此数组的首地址。其与&array[0]等价。同时array的地址不能改变。
2. 数组的下标从0开始。
3. 定义数组的时候,编译器会根据数组的长度声明一块连续内存的地址给数组。
4. 数组定义的时候,必须指定其长度
9.2 数组初始化
int array[3];
/*初始化例1*/
for(int i=0;i<3;i++)
{
array[i]=0;
}
/*初始化例2,对一个数组中的所有元素都置为0*/
memset(array,0,sizeof(array));
数组初始化与数组之间的赋值
一般来说,数组的赋值以及初始化使用循环操作:
int a[3]={1,2,3},b[3];
b=a;/*错误,不能把数组名放到等号左边。*/
//数组间赋值之循环方法
for(int i=0;i<3;i++)
{
b[i]=a[i];
}
//数组间赋值高效方法
memcpy(b,a,sizeof(a));//注意sizeof的用法9.5 debug和release的区别
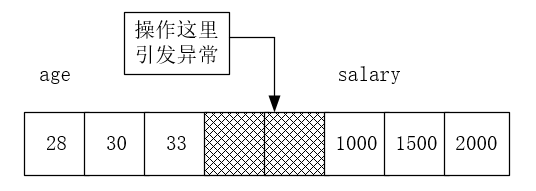
VS中的每一一个项目,都可以分别建立debug版和release版,release版通常不进行边界检查,这是与debug版之间最大的区别之一。
debug版下,当定义一块数组的时候,它会在数组的后面加上两个元素,如下图所示。一旦由于数组越界而操作了数组后面加上的这两个元素,程序将会终止,同时系统弹出一个对话框,来提示数组发生了越界。
第10章 指针
10.3.1野指针
当定义一个指针的时候如果不对他进行初始化,那么它指向的就是一个不确定的值,这种情况下,当我们访问该指针指向的变量时,程序可能就会发生问题。
野指针的解决办法:
如果不知道指针暂时指向何方,那就让他暂时指向NULL。
即:short *ptr=NULL
指针的一条原则:
- 一个xx型的指针指向一个xx型的地址,或者
- 一个xx型的指针保存一个xx型的地址。
指针赋值的几种形式:
int *p1,*p2;
int a=10;
int array[]={1,2,3};
p2=&array[2];
p1=&a;
p1=array;
p1=(int *)malloc(sizeof(int));//强制转换malloc申请的内存。
p1=NULL;//p1指向空指针10.4 void 和NULL
void的一种用法是声明一个void类型的指针,void *vp;对于void类型的指针,其只保存一个地址,而不包含变量的类型信息,所以任何类型的指针都可以直接赋值给他而无需进行强制转换。
由于void类型指针只包含地址信息,不包含长度信息,将任何类型的指针赋值给void类型指针时都会丢失长度信息。所以对void类型指针进行算术运算和进行取值操作都是不允许的。
10.5 指针和数组不得不说的那些事
如果指针p指向数组变量a,则通过数组下标访问数组中的元素和通过指针加偏移量来访问数组中的元素是等价的。
当a[i]用在一个表达式中的时候 ,编译器会自动将其转换成为指针加偏移量*(a+i)的形式,所以a[i]这种书写方式只是为了给程序员书写代码的时候准备的。经过编译之后是不存在a[i]这种形式的。
当数组类型被用于声明函数形参的时候,如申明函数func(int a[]),编译器会将其自动转换为func(int *a);
指针和数组的不同:
1. 不能改变数组变量a的地址,所以a++这种写法是不行的。但是指向数组的指针变量pa却可以写成pa++是没有问题的。因为指针可以改变指向。
2. 当指针pa指向一个单独的变量时,指针的行为和数组就没有相同之处了。
3. 如果在一个文件中定义成 int a[5],而在另外一个包含的文件中使用extern int *a这样的却是不允许的。
10.8 动态内存分配
malloc函数和colloc函数的区别
1. 参数不同:
void *malloc(size_t size);
void *calloc(size_t numElements,size_t sizeofElement);- 真正的不同是这两个函数申请内存完成后的动作。calloc会将分配的内存中的每一位都初始化为零。
- 两个函数分配的时候都是以字节为单位。例如像分配10个int型的数,则应该写成malloc(sizeof(int)*10).
- 返回值是void类型,因此需要把其转换成需要的类型,例如
int p=(int )malloc(sizeof(int)*10). - 这两个函数的使用均应该包含头文件
题外话
memcpy与memmove的目的都是将N个字节的源内存地址的内容拷贝到目标内存地址中。
但当源内存和目标内存存在重叠时,memcpy会出现错误,而memmove能正确地实施拷贝,但这也增加了一点点开销。
memmove用于从src拷贝count个字符到dest,如果目标区域和源区域有重叠的话,memmove能够保证源串在被覆盖之前将重叠区域的字节拷贝到目标区域中。但复制后src内容会被更改。但是当目标区域与源区域没有重叠则和memcpy函数功能相同。一个关于数组指针的例子
main()
{
int a[5]={1,2,3,4,5};
int *ptr=(int *)(&a+1);
printf("%d,%d",*(a+1),*(ptr-1));
}打印出来是:2 5
分析:
对一个指针加1操作,得到的是下一个元素的地址,而不是原有地址的值直接加1.所以,一个类型为T的指针的移动,以sizeof(T)为移动单位。
因此对上例来说,a是一个一位数组,数组中有5个元素,所以a的类型是数组指针。
ptr是一个指向int型的指针,所以ptr是整型指针。
&a+1:取数组a的首地址,该地址的值加上sizeof(a)的值,即为&a+5*sizeof(int),即下一个数组的首地址。 (int )(&a+1): 则是把上一步计算出来的地址,强制转换为int 类型,赋值给ptr。
*(a+1): a,&a的值是一样的,但意思不一样,a是数组首元素的首地址,也就是a[0]的首地址,&a是数组的首地址,a+1是数组下一元素的首地址,即a[1]的首地址,&a+1是下一个数组的首地址。
- 下面程序段包含4个函数,其中具有隐含this指针的是()
int f1();
class T
{
public:static int f2();
private:friend int f3();
protect:int f4();
};正确答案: D 你的答案: A (错误)
f1
f2
f3
f4
答案分析:类的每个非静态成员函数都含有一个指向当前对象的指针,即this指针。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









