







一、问题
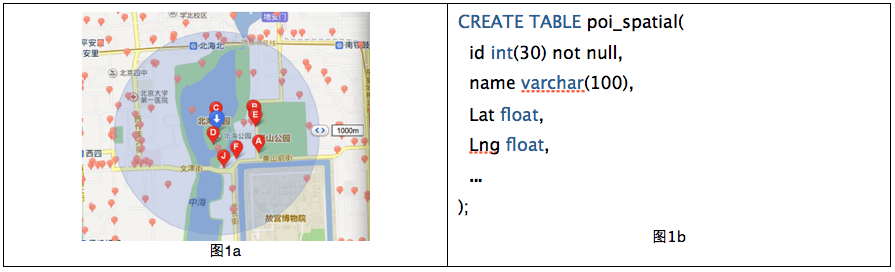
先思考个常见的问题:如何根据自己所在位置查询来查询附近50米的POI(point of interest,比如商家、景点等)呢(图1a)?
每个POI都有经纬度信息,我用图1b的SQL语句在mySQL中建立了POI_spatial的表,其中lat和lng两个字段来代表纬度和经度。为后续分析方便起见,我人造了40万个POI数据。
二、传统的解决思路
方法一:暴力方法
该方法的思路很直接:计算位置与所有POI的距离,并保留距离小于50米的POI。
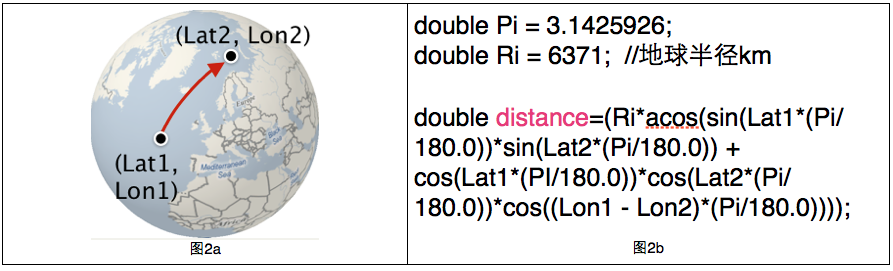
插句题外话,计算经纬度之间的距离不能像求欧式距离那样平方开根号,因为地球是个不规整的球体(图2a),按最简单的完美球体假设,两点之间的距离函数应该如图2b所示。
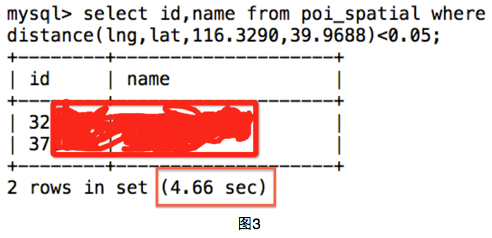
该方法的复杂度为:40万*距离函数。我们将球体距离函数写为mysql存储过程distance,之后我们执行查询操作(图3),发现花费了4.66秒。
该方法耗时的原因显而易见,执行了40万次复杂的距离计算函数。
方法二:矩形过滤方法
该方法分为两部:
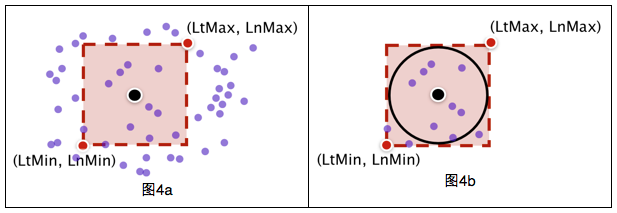
a)先用矩形框过滤(图4a),判断一个点在矩形框内很简单,只要进行两次判断(LtMin<lat<LtMax; LnMin<lng<LnMax),落在矩形框内的POI个数为n(n<<40万);
b)用球面距离公式计算位置与矩形框内n个POI的距离(图4b),并保留距离小于50米的POI
矩形过滤方法的复杂度为:40万*矩形过滤函数 + n*距离函数(n<<40万)。
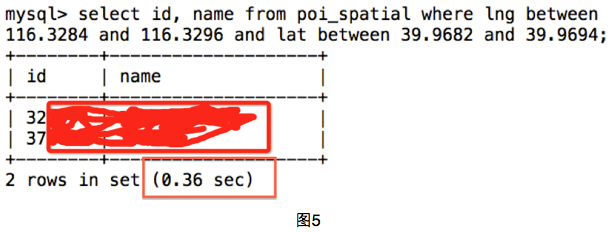
根据这个思路我们执行SQl查询(图5)(注: 经度或纬度每隔0.001度,距离相差约100米,由此推算出矩形左下角和右上角坐标),发现过滤后正好剩下两个POI。
此查询花费了0.36秒,相比于方法一查询时间大大降低,但是对于一次查询来说还是很长。时间长的原因在于遍历了40万次。
方法三:B树对经度或纬度建立索引
方法二耗时的原因在于执行了遍历操作,为了不进行遍历,我们自然想到了索引。我们对纬度进行了B树索引。

此方法包括三个步骤:
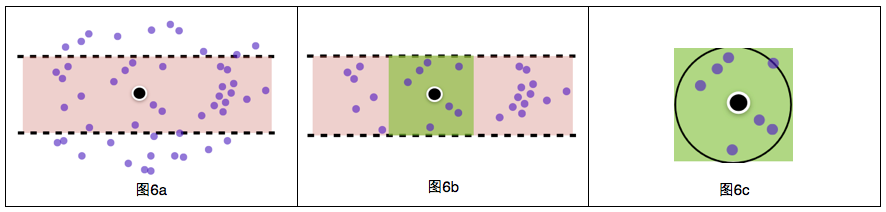
a)通过B树快速找到某纬度范围的POI(图6a),个数为m(m<40万),复杂度为Log(40万)*过滤函数;
b)在步骤a过滤得到的m个POI中查找某经度范围的POI(图6b),个数为n(n<m),复杂度为m*过滤函数;
c) 用球面距离公式计算位置与步骤b得到的n个POI的距离(图6c),并保留距离小于50米的POI
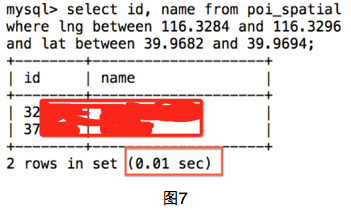
执行SQL查询(图7),发现时间已经大大降低,从方法2的0.36秒下降到0.01秒。
三、B树能索引空间数据吗?
这时候有人会说了:“方法三效果如此好,能够满足我们附近POI查询问题啊,看来B树用来索引空间数据也是可以的嘛!”
那么B树真的能够索引空间数据吗?
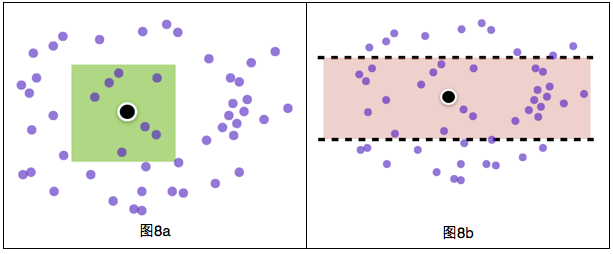
1)只能对经度或纬度索引(一维索引),与期望的不符
我们期待的是快速找出落在某一空间范围的POI(如矩形)(图8a),而不是快速找出落在某纬度或经度范围的POI(图8b),想象一下,我要查询北京某区的POI,但是B树索引不仅给我找出了北京的,还有与北京同一维度的天津、大同、甚至国外城市的POI,当数据量很大时,效率很低。
2)当数据是多维,比如三维(x,y,z),B树怎么索引?
比如z可能是高程值,也可能是时间。有人会说B树其实可以对多个字段进行索引,但这时需要指定优先级,形成一个组合字段,而空间数据在各个维度方向上不存在优先级,我们不能说纬度比经度更重要,也不能说纬度比高程更重要。
3)当空间数据不是点,而是线(道路、地铁、河流等),面(行政区边界、建筑物等),B树怎么索引?
对于面来说,它由一系列首尾相连的经纬度坐标点组成,一个面可能有成百上千个坐标,这时数据库怎么存储,B树怎么索引,这些都是问题。
既然传统的索引不能很好的索引空间数据,我们自然需要一种方法能对空间数据进行索引,即空间索引。
下节将对空间索引分类体系、原理、优缺点及数据库支持情况进行阐述(正在写)。















 2814
2814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









