






如何在虚拟机中安装ROS,以及安装过程的错误总结,适合小白。
首先安装ROS需要在Linux系统下,如果你不会安装双系统就安装一个虚拟机
对于刚刚接触ros的人来说,首先就是解决安装问题,本人在网上查找了多种在Ubuntu16.04上安装ros的方法,自己摸索着安装了多次,才找到一种成功的安装经验,今天就跟大家分享一下,首先就假设已经安装好了虚拟机并安装好了Ubuntu16.04(虚拟机建议用VM,因为我之前用的virtualbox会出些问题,VM可在公众号:软件安装管家上下载安装,Ubuntu16.04的安装网上有很多教程,我用的镜像文件源是中科大的)。
在安装ros之前首先看一下你的服务器是哪里的,在Ubuntu里搜索“软件和更新“以查看,一般默认是 中国的服务器 ,因为我的镜像是中科大的这里我把服务器也设置成了中科大的服务器就是ustc.edu那个。更换服务器后点击关闭后,跳出弹窗点运行就是了,等待一会后就可以了
另外安装ros最好链接自己手机热点,这样下载速度会快很多!
如果你还不会设置主机与虚拟机共享粘贴板,就用虚拟机中的浏览器搜索安装教程,就可以直接复制粘贴这些指令,不用手敲了。
1.设置sources.list
打开一个终端输入指令:sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
输入密码后(密码就是你的登录密码,不显示只管输)
2.设置key
输入指令:sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、更新package
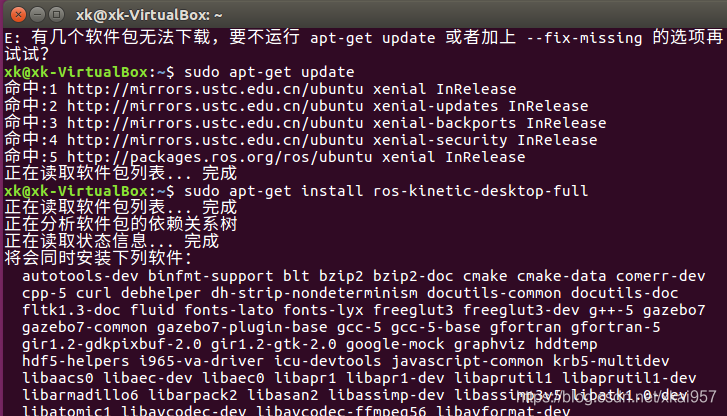
接着输入指令:sudo apt-get update
如下图所示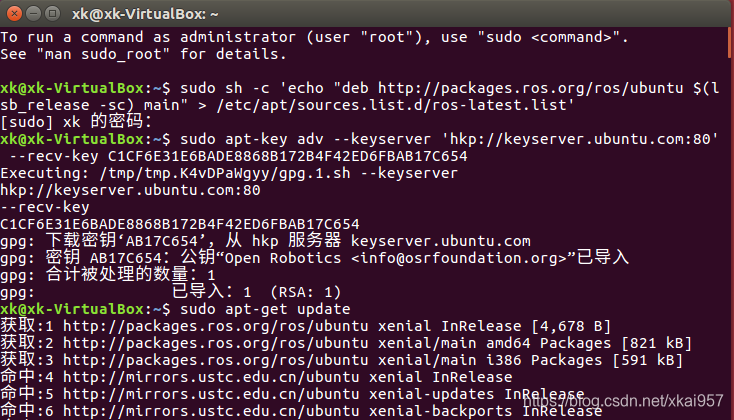
4、安装ROS kinetic完整版
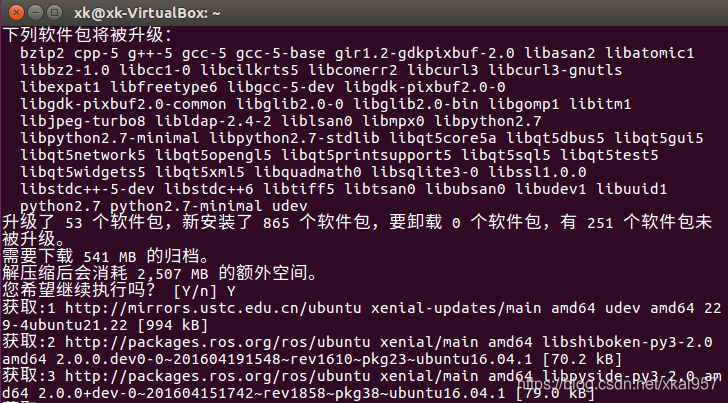
完成后继续输入指令:sudo apt-get install ros-kinetic-desktop-full
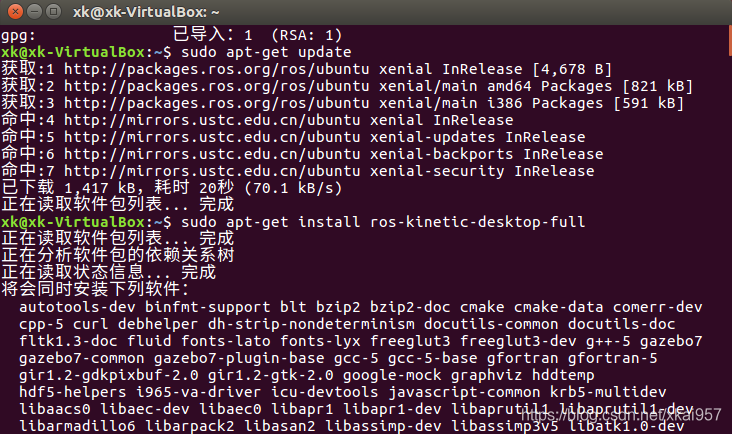
遇到问题输入Y就是了,后面也是(安装时间长短视网速而定,我连的手机热点感觉是要比宿舍网线和WiFi快)安装过程较长,耐心等待!
因为网路不稳定的原因会遇到部分安装包没有下载成功的问题,这时只需要再次输入指令:sudo apt-get update(如果你的上一步绝大部分是获取或者命中,再次执行这一指令会很快,如果大部分都是错误,那你的网络一定是有问题的)
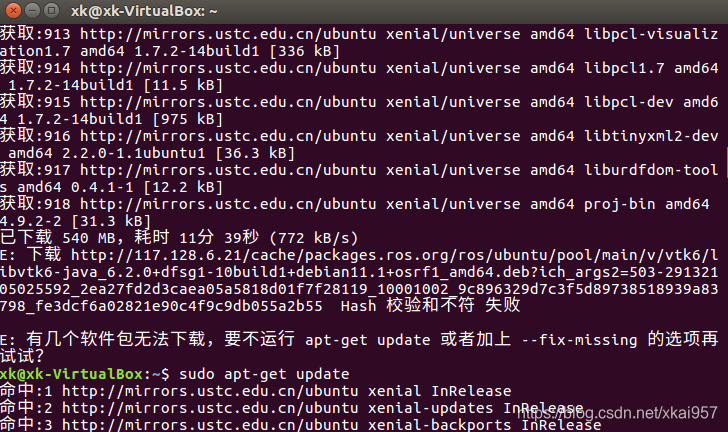
没错再次执行指令:sudo apt-get install ros-kinetic-desktop-full
这样应该不会再出现问题了。
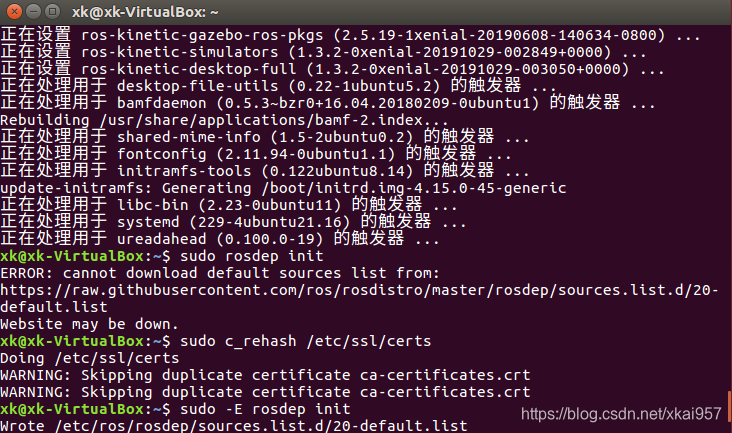
5、初始化rosdep
在使用ROS之前需要初始化rosdep
接着按照下图输入指令:sudo rosdep init
如果很不幸你也出现了下图的错误:ERROR: cannot downloan…
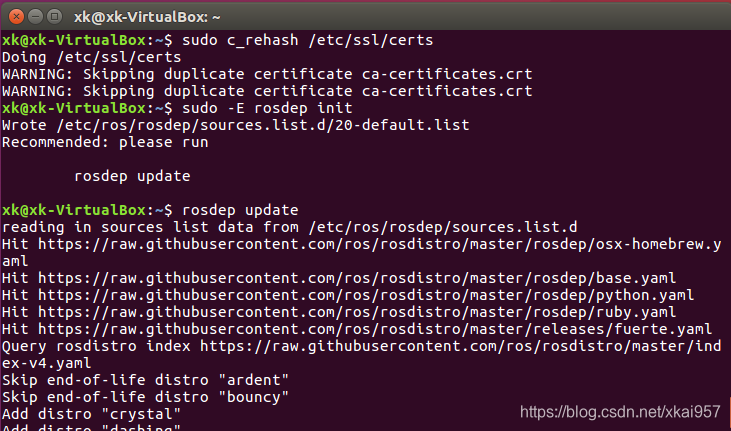
按照图所示输入指令:sudo c_rehash /etc/ssl/certs
回车后再输入指令:sudo -E rosdep init(如果没有出现错误这两步可以直接跳过)
这时再执行指令:rosdep update(如果在输入指令:sudo rosdep init之后没有出错,直接执行这一步即可)
6、配置ROS环境
输入指令:echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
再输入指令:source ~/.bashrc
执行完这两步后如果没有任何反应说明已经安装好了,如果出现其他错误,再查查解决方法吧。
7、安装依赖项
接着输入指令:sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
或者输入指令:sudo apt install python-rosinstall(这两个都行,第一个是官网上的)

到此全部安装结束!
8、测试ROS是否安装成功
关闭终端,接下来我们测试一下是否安装成功,回到桌面,鼠标右键点击打开终端,或者Ctrl+Alt+t打开终端
在终端中输入指令:roscore
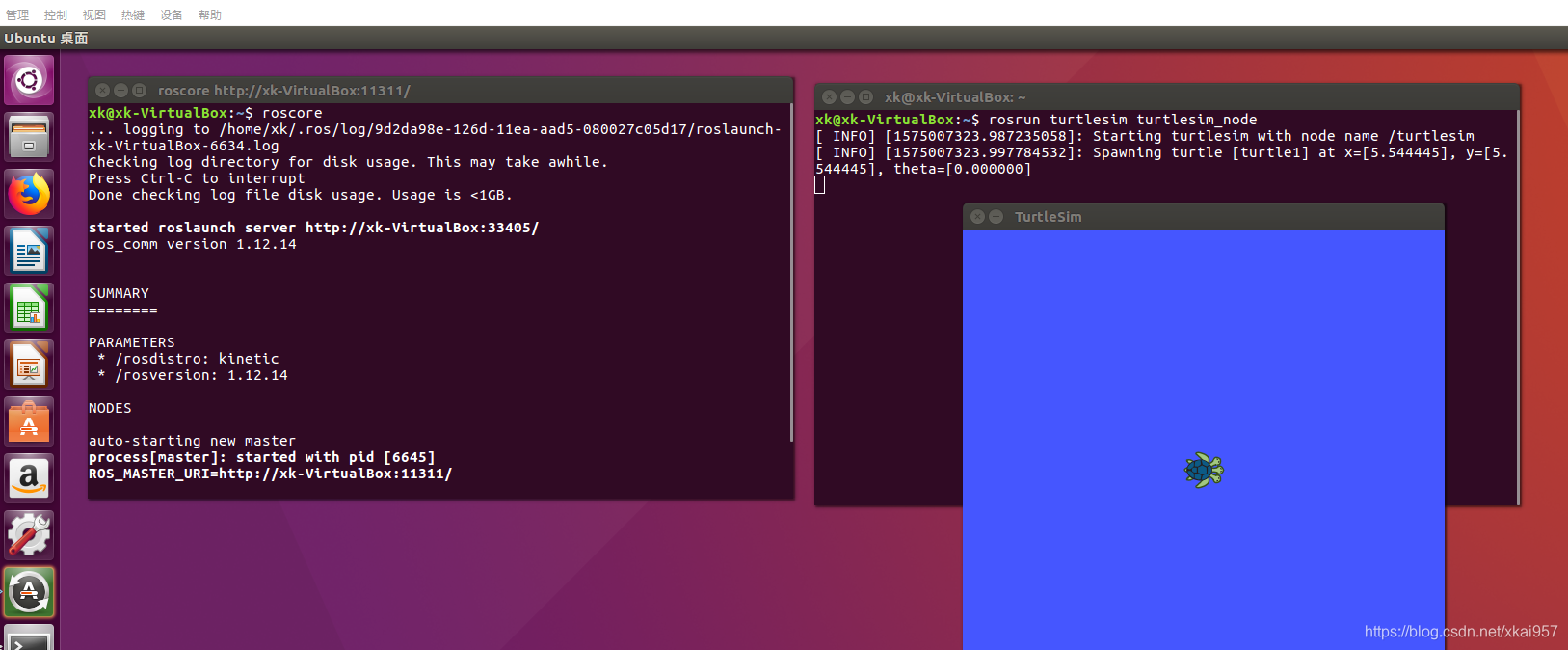
回车后再次Ctrl+Alt+t打开另一终端,输入指令:rosrun turtlesim turtlesim_node
会看到一只小海龟
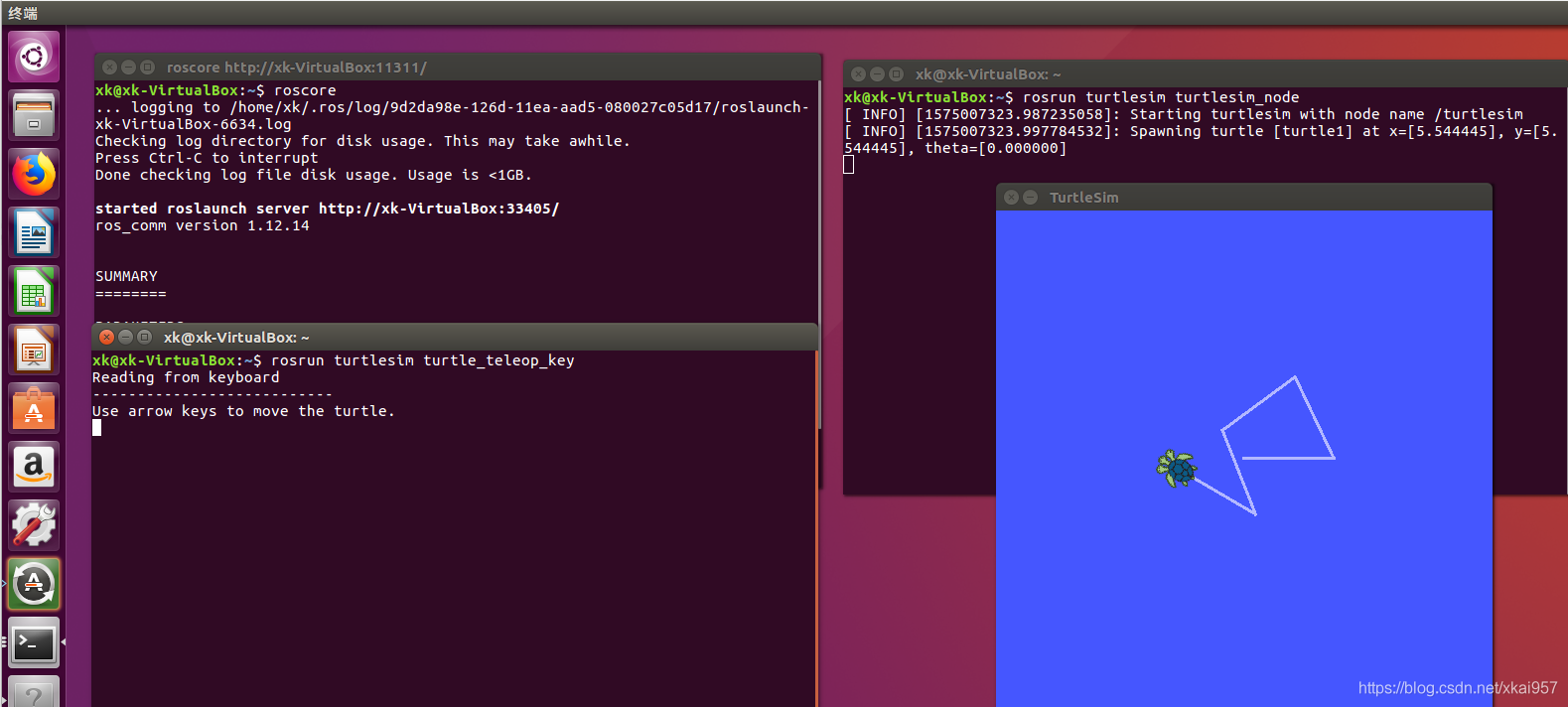
再次打开一个终端,输入指令:rosrun turtlesim turtle_teleop_key
这时就可以通过键盘操纵小海龟运动,看下图!
另外对于小白来说如何设置主机与虚拟机之间共享粘贴以及如何让虚拟机小窗变全屏自己百度。
(最后,如果有帮助就点个赞呗。)














 2446
2446











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









