



[Android] 取名字典(1.0.6)
链接:https://pan.xunlei.com/s/VOfZ4A__xtx_qs_JEYJqF5Y8A1?pwd=hhw7#
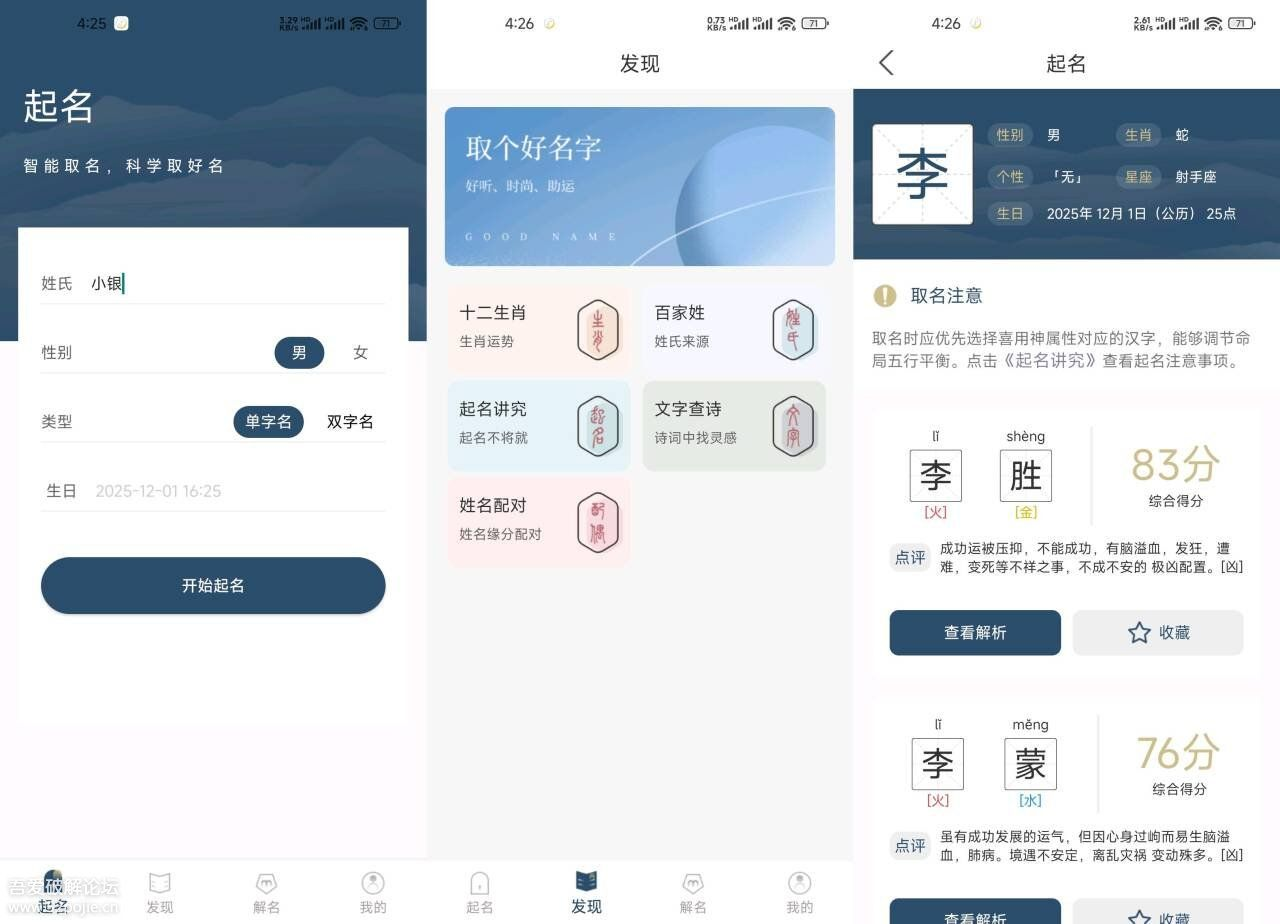
一款专业智能的安卓起名辅助工具,覆盖新生儿取名、成人改名、企业命名、网名昵称创作等多元场景。软件融合传统周易五行、生肖喜忌与现代审美,内置百万级多语言名字库,含诗词典籍优质用字。支持按性别、字数、五行、寓意等智能筛选,提供名字音形义解析、五格数理评分、重名查询等功能,还能收藏对比候选名。界面简洁易操作,既保含文化底蕴又兼顾时代感,搭配专家咨询与社区互动,让起名高效精准,是兼顾实用性与专业性的得力工具。

















 1403
1403

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









