







参考博客:
https://blog.csdn.net/AIchipmunk/article/details/41489825?spm=1001.2014.3001.5502
https://blog.csdn.net/xx780452700/article/details/124425539?spm=1001.2014.3001.5502
相机内参
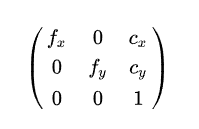
OpenCV的相机内参矩阵包括fx、fy、u0或cx、v0或cy这4个参数,它们分别是相机的水平焦距、垂直焦距、水平方向中心点、垂直方向中心点,我们还可以通过其他方式获取到相机的分辨率,这样通过相机的这6个参数就可以构建OpenGL中的投影矩阵。
OpenCV的内参矩阵:
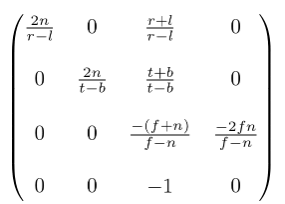
生成投影矩阵
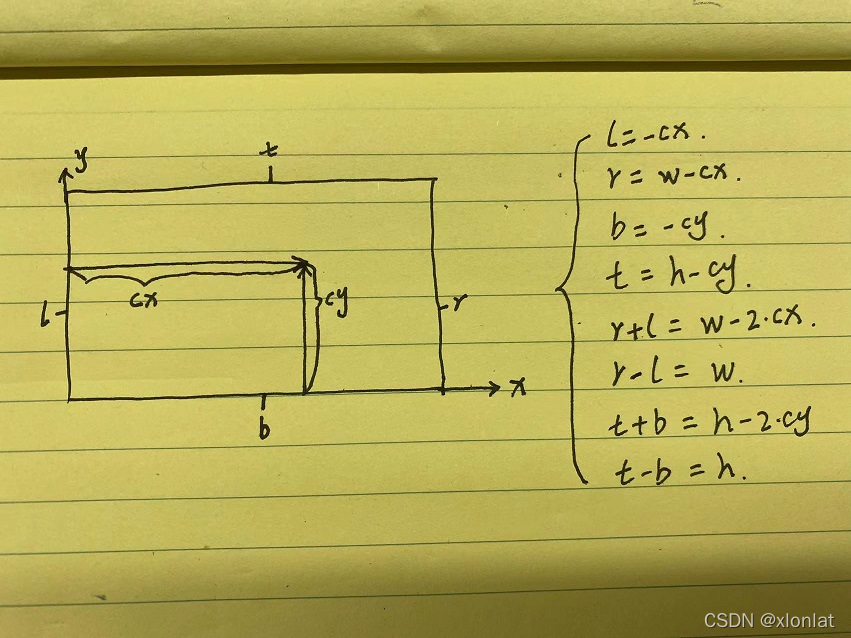
将OpenCV内参矩阵的值分别带入到投影矩阵:
参考代码:
// 通过内参构造投影矩阵
void InitProjectMat(float w, float h, float fx, float fy, float cx, float cy, float znear, float zfar, float proj[16])
{
proj[0] = 2 * fx / w;
proj[1] = 0.0f;
proj[2] = 0.0f;
proj[3] = 0.0f;
proj[4] = 0.0f;
proj[5] = 2 * fy / h;
proj[6] = 0.0f;
proj[7] = 0.0f;
proj[8] = (w - 2.f * cx) / w;
proj[9] = (h - 2.f * cy) / h;
proj[10] = (-zfar - znear) / (zfar - znear);
proj[11] = -1.0f;
proj[12] = 0.0f;
proj[13] = 0.0f;
proj[14] = -2.0f * zfar * znear / (zfar - znear);
proj[15] = 0.0f;
}














 1461
1461











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









