



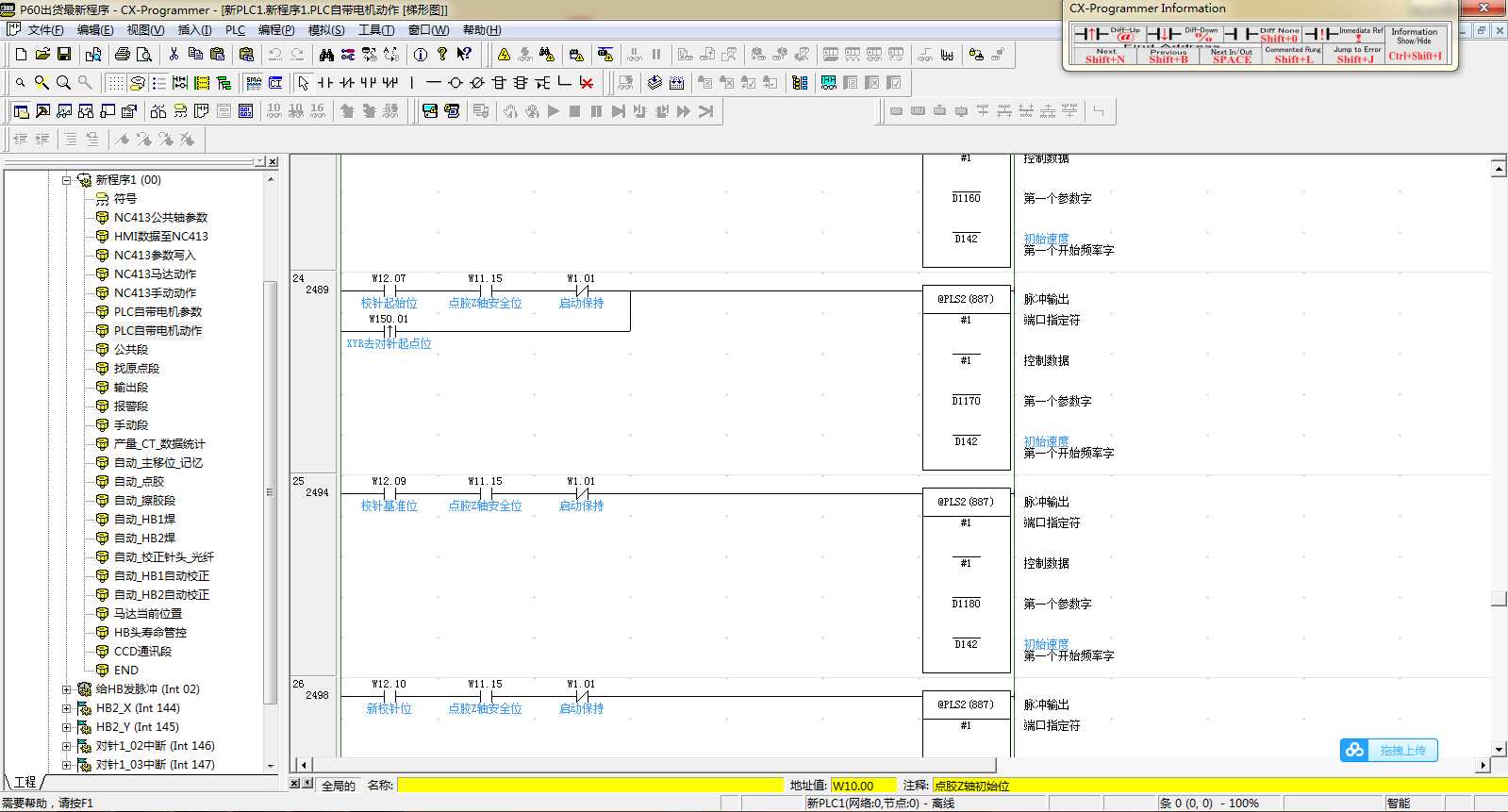
欧姆龙cp1h带两个nc413模块,总共十个轴控制程序案例,还有DD马达控制,内带详细注释,包含nc413所有参数设置,写入,定位控制,附带昆仑通泰触摸屏程序和dd马达程序
最近在搞一个项目,用欧姆龙CP1H PLC带两个NC413模块,控制十个轴,还涉及到DD马达的控制。这个项目挺有意思的,过程中遇到了不少坑,但也学到了很多。今天就来分享一下这个项目的控制程序案例,顺便聊聊NC413模块的参数设置和定位控制。
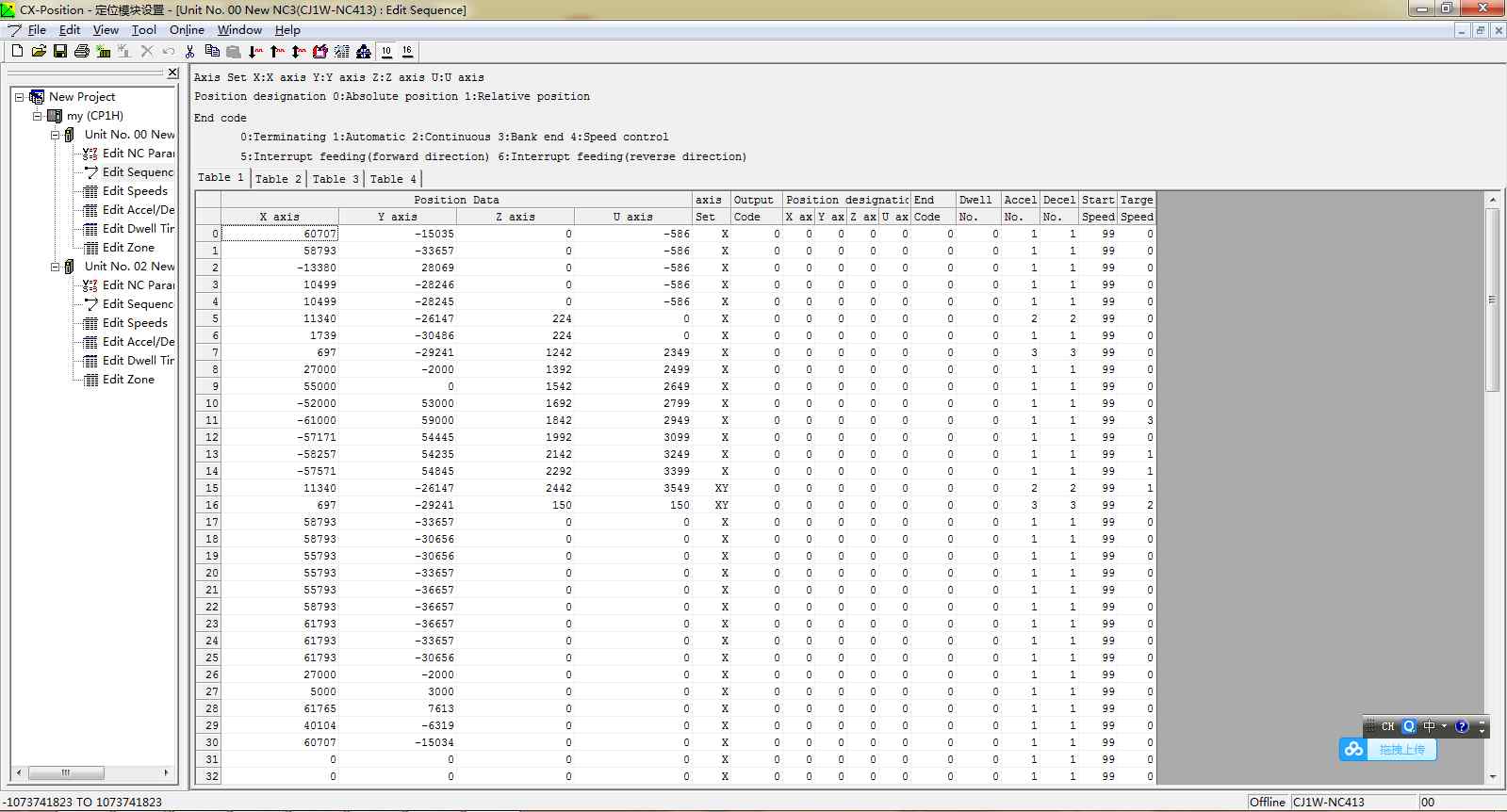
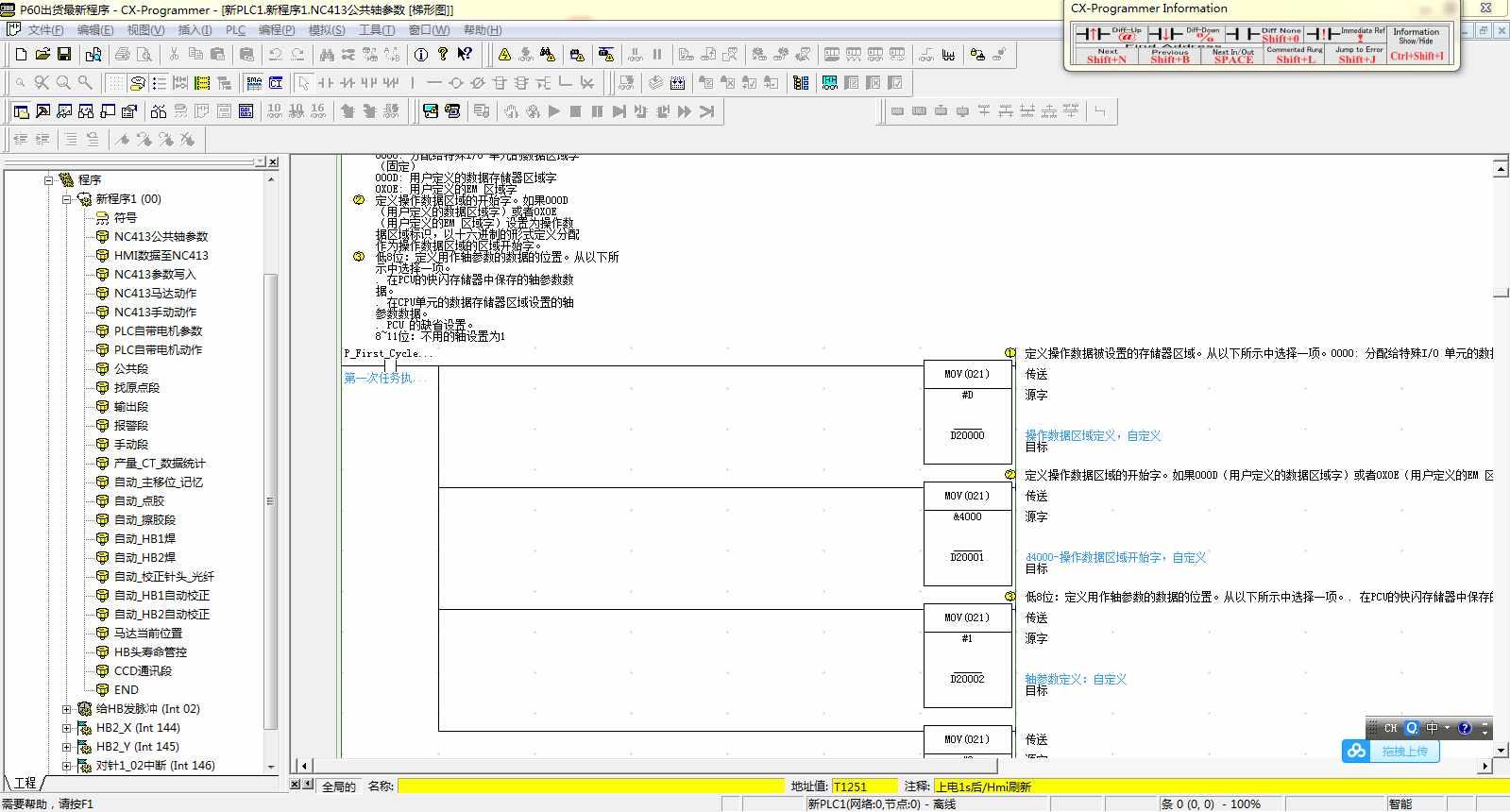
首先,我们来看看NC413模块的基本设置。NC413是欧姆龙的一个多轴控制模块,支持最多4个轴的控制。我们这次用了两个NC413模块,总共可以控制8个轴,再加上CP1H自带的两个轴,正好十个轴。
// NC413模块初始化
NC413_Init();
// 设置轴1的速度和加速度
SetAxisParam(1, 1000, 500);
// 设置轴2的速度和加速度
SetAxisParam(2, 1200, 600);
上面的代码是NC413模块的初始化设置,以及两个轴的速度和加速度设置。这里需要注意的是,NC413模块的每个轴都需要单独设置参数,包括速度、加速度、减速度等。这些参数设置得合理与否,直接影响到后续的定位控制效果。
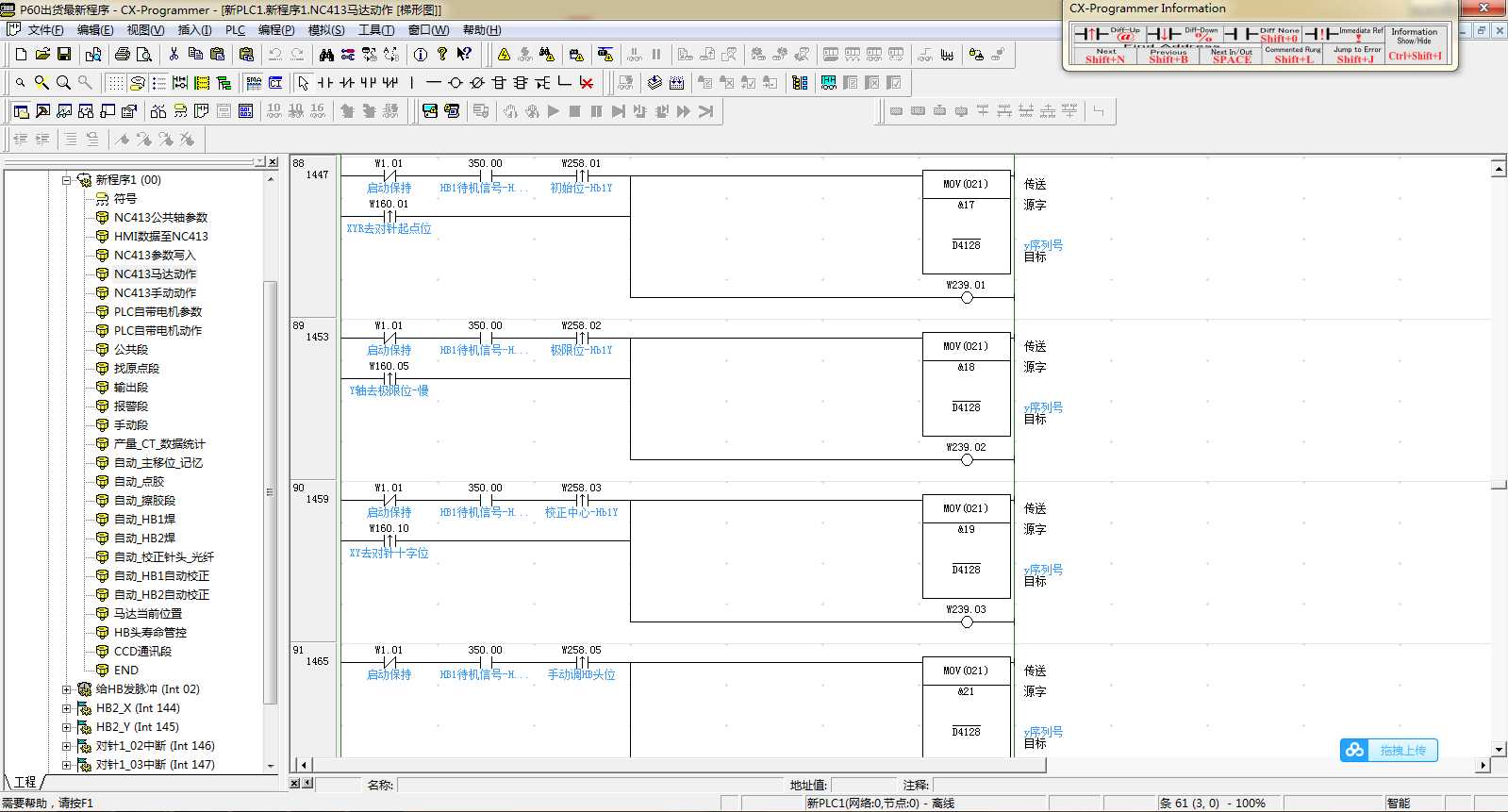
接下来,我们看看定位控制的实现。NC413模块支持多种定位模式,比如绝对定位、相对定位、连续运动等。我们这次主要用到了绝对定位和相对定位。
// 轴1绝对定位到1000的位置
MoveAxisAbs(1, 1000);
// 轴2相对移动500的位置
MoveAxisRel(2, 500);
这两个函数分别实现了轴1的绝对定位和轴2的相对定位。绝对定位是指将轴移动到指定的绝对位置,而相对定位则是从当前位置移动指定的距离。这两种定位模式在不同的应用场景下各有优劣,需要根据实际情况选择。
再来说说DD马达的控制。DD马达(Direct Drive Motor)是一种直接驱动马达,没有中间的减速机构,所以响应速度非常快。我们这次用到了DD马达的闭环控制,通过编码器反馈来实现精确的位置控制。
// DD马达初始化
DDMotor_Init();
// 设置DD马达的目标位置
SetDDMotorTarget(1000);
// 启动DD马达
StartDDMotor();
上面的代码是DD马达的初始化设置和启动控制。DD马达的控制相对简单,主要是设置目标位置和启动马达。由于DD马达的响应速度非常快,所以在实际应用中需要注意控制信号的稳定性,避免出现抖动或过冲的情况。
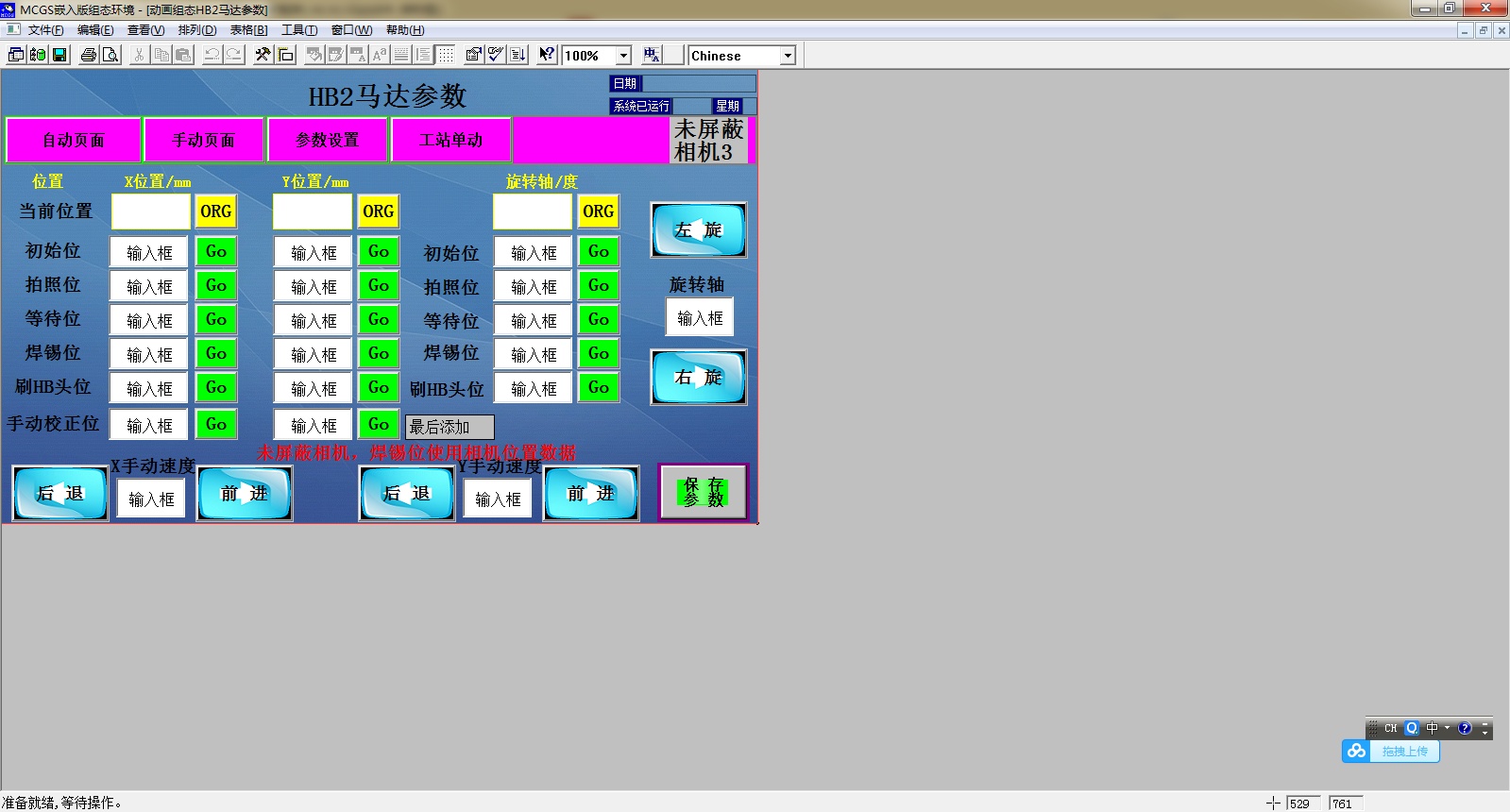
最后,我们再来看看昆仑通泰触摸屏的程序。触摸屏作为人机交互的界面,主要负责显示设备状态和接收用户输入。我们这次用到了触摸屏的多个画面,分别显示各个轴的状态和DD马达的运行情况。
// 触摸屏主画面初始化
TouchScreen_Init();
// 显示轴1的状态
ShowAxisStatus(1);
// 显示DD马达的状态
ShowDDMotorStatus();
这些代码实现了触摸屏的初始化和状态显示功能。触摸屏的画面设计需要简洁明了,方便操作人员快速获取设备状态和进行操作。
总的来说,这个项目涉及到的内容比较多,从PLC到NC413模块,再到DD马达和触摸屏,每一个环节都需要仔细调试和优化。过程中虽然遇到了不少问题,但通过不断的学习和尝试,最终还是顺利完成了任务。希望这些经验对大家有所帮助,也欢迎大家在评论区交流讨论。
欧姆龙cp1h带两个nc413模块,总共十个轴控制程序案例,还有DD马达控制,内带详细注释,包含nc413所有参数设置,写入,定位控制,附带昆仑通泰触摸屏程序和dd马达程序



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









