






唐木 编译整理
量子位 出品 | 公众号 QbitAI

近日,哈佛大学微型机器人实验室推出了一款被称为HAMR-F的微型机器人,它身长4.5厘米重2.8g,但是可以达到17.2cm/s的惊人速度,换句话说它的移动速度可以达到每秒四个身长。这相比于先前的版本已经有了300%的提升。
这一机器人的研发充分利用了先进制造、传感器技术和能源优化技术,才获得了性能和稳定性的极大提升。它最令人惊异的便是能腾空而越,甚至可以双脚腾空保持稳定。
class="video_iframe" data-vidtype="2" allowfullscreen="" frameborder="0" data-ratio="1.7647058823529411" data-w="480" data-src="http://v.qq.com/iframe/player.html?vid=e1335hmz01i&width=670&height=376.875&auto=0" style="display: none; width: 670px !important; height: 376.875px !important;" width="670" height="376.875" data-vh="376.875" data-vw="670" src="http://v.qq.com/iframe/player.html?vid=e1335hmz01i&width=670&height=376.875&auto=0"/>
这一机器人与HAMR系列的其他机器人相比除了更加可靠的稳定性外,还有更加自主的运动过程。通过配备微型锂电池,HAMR-F摆脱了系带的束缚,能更加自由的移动,在25mAh的电量下可以支持机器人运动4.5min。在最高速运动时,它的运动消耗(Cost of Transport:COT)达到了84,而相较而言人的COT只有0.2而自然界中的蟑螂则为16。工程师们正在致力于微调机器人的运动速度和驱动系统,从而使CoT超过蟑螂的水平。
虽然目前机器人是由人类操控,但是在将要实现的自动化中需要加入更多的传感器来帮助它走的更好。 科研人员们首先在它的身上加入了MEMS陀螺仪来保证HAMR-F在指定直线上行走的误差不超过10o 。在能顺利的走直线后,机器人还会集成更多的传感器来辅助机器人实现更好的控制,并适应具挑战性的环境。
这一机器人的高速运动得益于两个方面的突破,首先是对于动力系统传动部件的重新设计,使其单位质量拥有了更高的功率输出;另一方面则是来自于更为紧凑高效的升压变压器,以便用于独立驱动八个高压的压电致动器。这两个技术突破的结合造就了急速飞奔的HAMR-F,使它摆脱了线缆供电的束缚。
机器人的驱动部件来自于特殊设计的压电驱动装置:
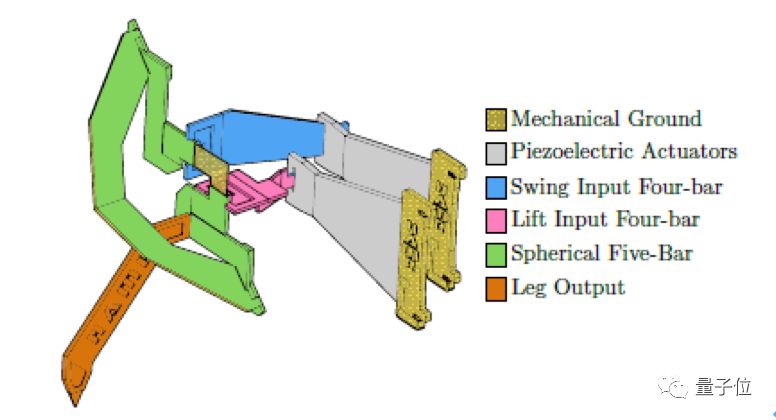
每一只腿有两个驱动单元构成,分别是粉红色的升降自由度和蓝色的扭转自由度,他们的动力都来自于灰色的压电致动器。
科研人员还计划为HAMR-F设计出了腾空而起的动作和抬起前脚只用后脚走路的高难度动力学步态。设计的目的在于帮助机器人越过较大的障碍物或者间隙。这些步态已经在有线缆的版本中实现了,现在要做的是将他们迁移到无线缆的HAMR-F上来,让它可以适应更多复杂的环境。
同时在未来的改进中,研究人员还计划将HAMR-F的CoT减小到相同大小昆虫的CoT以下,这主要归功于机器人所使用的特殊材料。例如驱动机器人运动的压电陶瓷致动器将会比生物肌肉组织拥有更高的能量密度和效率。更高的效率使得机器人可以在相同的电量下探索更大的范围,甚至可以可利用太阳能电池持续的为机器人提供动力。但目前相较于昆虫而言机器人还缺乏具有自愈功能的材料以及多个具有精细反馈功能的传感器。
研究人员们计划在未来为机器人加装相机(记录数据或者用于光流辅助控制)、在腿部加装障碍和摩擦反馈传感器,气体成分传感器等,以提高机器人的感知能力和应用范围。而HAMR-F可扩展的电路板和复杂系统使得这一切都将很快得以实现。
class="video_iframe" data-vidtype="2" allowfullscreen="" frameborder="0" data-ratio="1.7647058823529411" data-w="480" data-src="http://v.qq.com/iframe/player.html?vid=s133501uzih&width=670&height=376.875&auto=0" style="display: none; width: 670px !important; height: 376.875px !important;" width="670" height="376.875" data-vh="376.875" data-vw="670" src="http://v.qq.com/iframe/player.html?vid=s133501uzih&width=670&height=376.875&auto=0"/>
这不是哈佛大学微型机器人实验室的第一个机器人了,这个实验室致力于微型机器人的研究,像HAMR这样的机器人已经迭代了数代,下图是第三代的微型机器人:
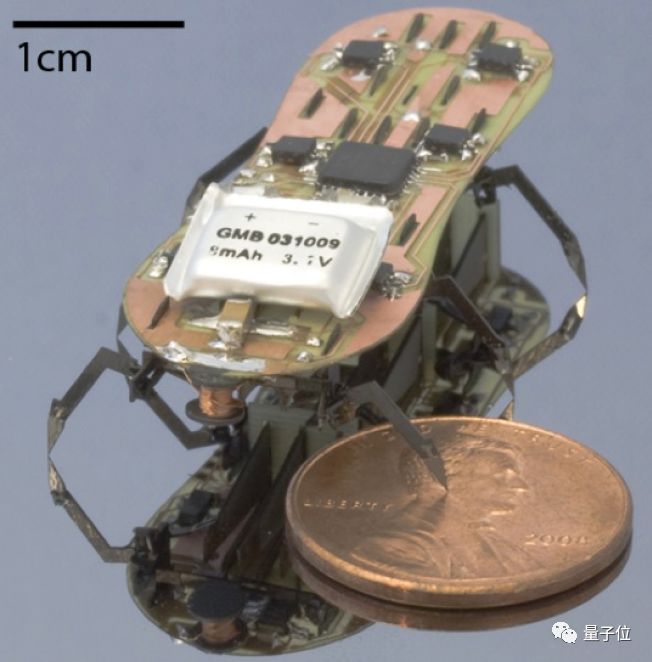
这是一只1.7g重的微型机器人,共有六条腿驱动机器人运动,其主要的压电驱动系统奠定了后续机器人的致动器基本发展方向。
而后这个实验室又对机器人进行了进一步的改进,HAMR-V和HAMR-VP就是其中的典型代表,随着技术的突破最小的机器人达到了上270mg的质量。

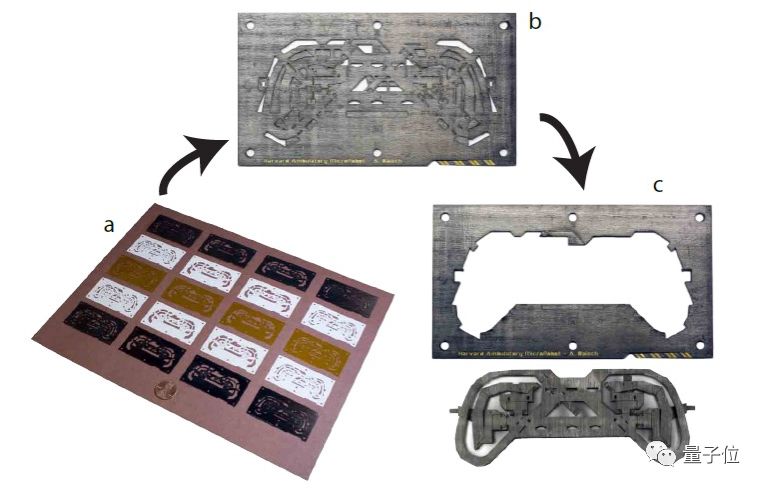
这种厘米长度克级重量的机器人,核心的传感器和驱动部件都依赖于MEMS实现,同时借助于平面印刷立体弹出(pop-up)制备组装工艺,使得这一机器人的制造十分方便。
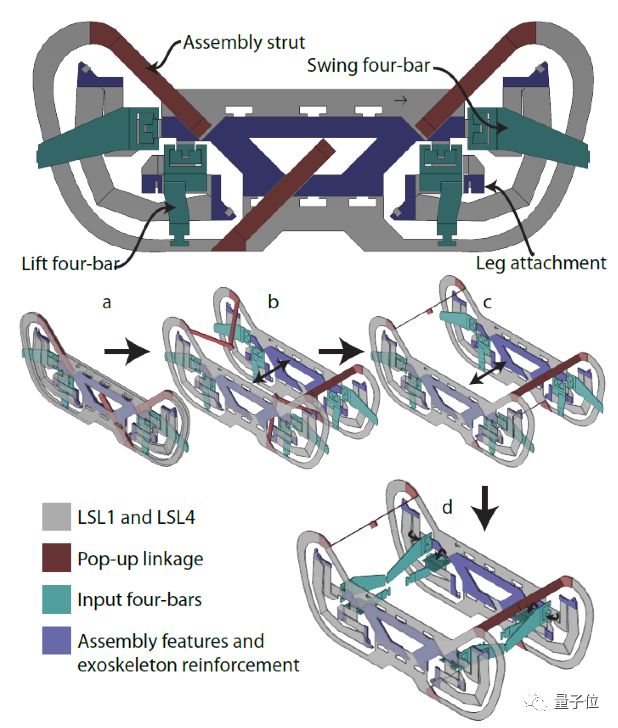
从平面制版到立体成型只需要短短几步即可实现:
正是这些一代代的迭代成就了今天轻便、快速的HAMR-F机器。如果想要了解更多信息,请观看它的爸爸BENJAMIN I GOLDBERG的个人主页:
http://benjamin-goldberg.com/
顺便提一句,哈佛大学的微型机器人人实验室除了这样昆虫大小的机器人,还有仿生扑翼机器人,像这样的和这样的:

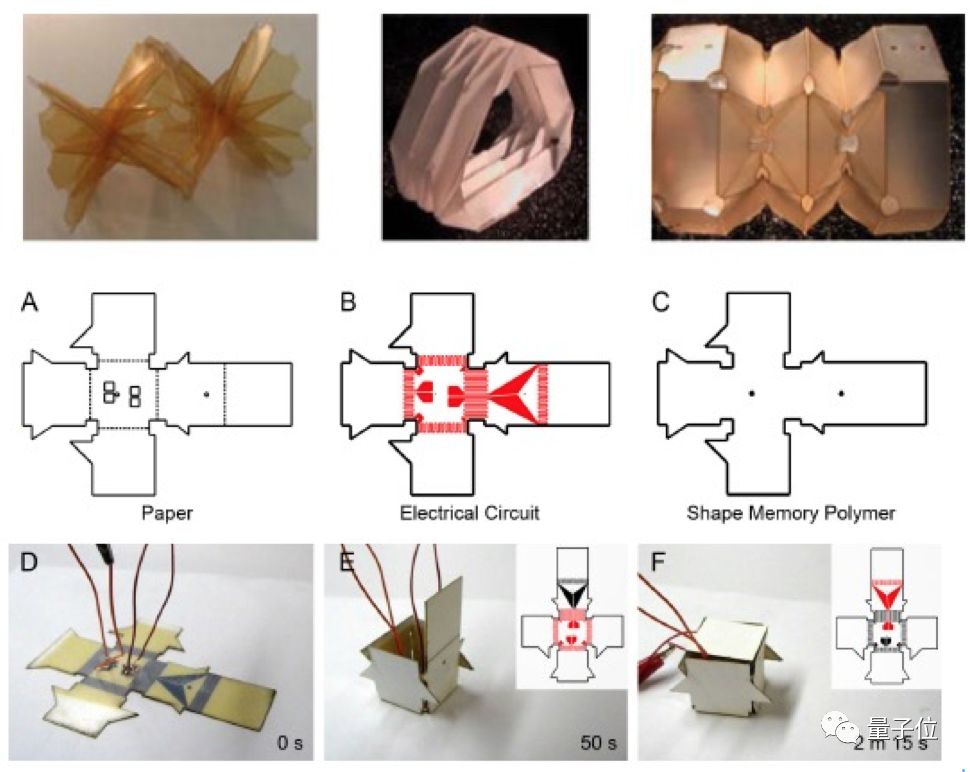
还有可以直接打印折叠成型的机器人:
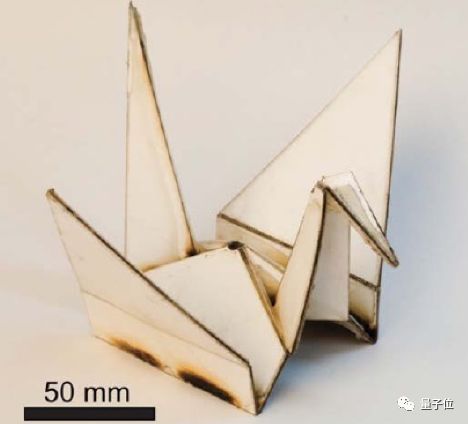
没事的时候还可以打印一个自折叠的千纸鹤机器人送给心仪的姑娘:
更多详情请看:http://micro.seas.harvard.edu
— 完 —
加入社群
量子位AI社群15群开始招募啦,欢迎对AI感兴趣的同学,加小助手微信qbitbot6入群;
此外,量子位专业细分群(自动驾驶、CV、NLP、机器学习等)正在招募,面向正在从事相关领域的工程师及研究人员。
进群请加小助手微信号qbitbot6,并务必备注相应群的关键词~通过审核后我们将邀请进群。(专业群审核较严,敬请谅解)
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复“招聘”两个字。

量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









