






机器人C++库(12)Robotics Library 之路径规划算法:PRM、RRT、EET算法
RL库的运动规划(rl::plan)模块集成了以下经典的路径规划算法:
- PRM算法:概率路线图算法
- RRT算法:快速探索随机树算法
- EET算法:搜索树算法-基于采样:https://blog.csdn.net/yohnyang/article/details/127783244
另外,补充一个开源运动规划库OMPL:https://ompl.kavrakilab.org/index.html
下边参考官方给出来的例程讲述路径规划算法原理及使用,规划效果如下图所示:
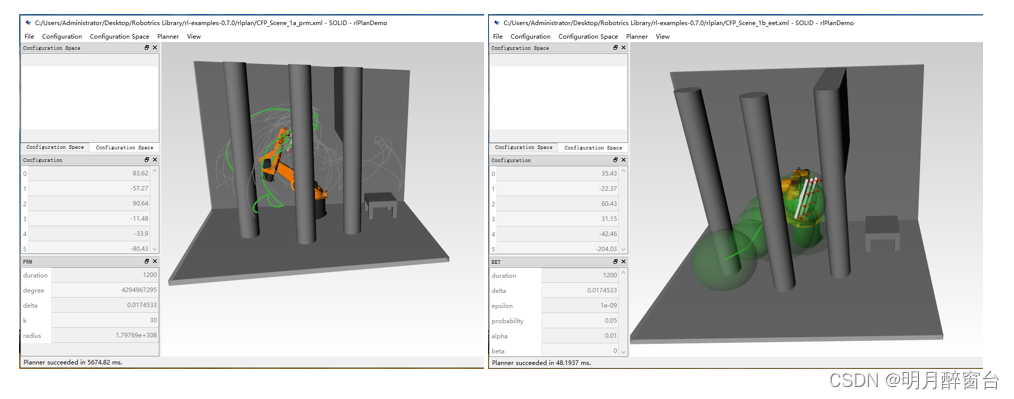
左图是PRM算法进行路径规划的结果,灰色路径是拟生成所有路径,绿色路径是最优路径;右图是采用EET搜索树算法进行规划的结果,绿色球球心连接起点与终点的最短路径即为最优路径。

 订阅专栏 解锁全文
订阅专栏 解锁全文















 418
418











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











