









直接使用小觅相机运行MYNT-EYE-VINS-Sample
软件配置:ubuntu16.04,ROS Kinetic 。
硬件配置:小觅S 1030相机。
1,下载 MYNT-EYE-SDK-2 及安装 mynt_eye_ros_wrapper(https://github.com/slightech/MYNT-EYE-SDK-2)
2,安装 MYNT-EYE-VINS-Sample
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone -b sdk2 https://github.com/slightech/MYNT-EYE-VINS-Sample.git
cd ..
catkin_make
source devel/setup.bash
3 ,利用下述命令获取相机内参等参数,并更新 distortion_parameters 和 projection_parameters 参数
cd MYNT-EYE-SDK-2
./samples/_output/bin/tutorials/get_img_params
4,打开终端, 开启摄像头。
cd MYNT-EYE-SDK-2
source wrappers/ros/devel/setup.bash
roslaunch mynt_eye_ros_wrapper mynteye.launch
5,新开另一个终端,运行MYNT-EYE-VINS-Sample
cd ~/catkin_ws
source devel/setup.bash
roslaunch vins_estimator mynteye.launch
注意点:
1,注意工作路径
2,注意没有设置环境变量,每开一个终端都需要source.
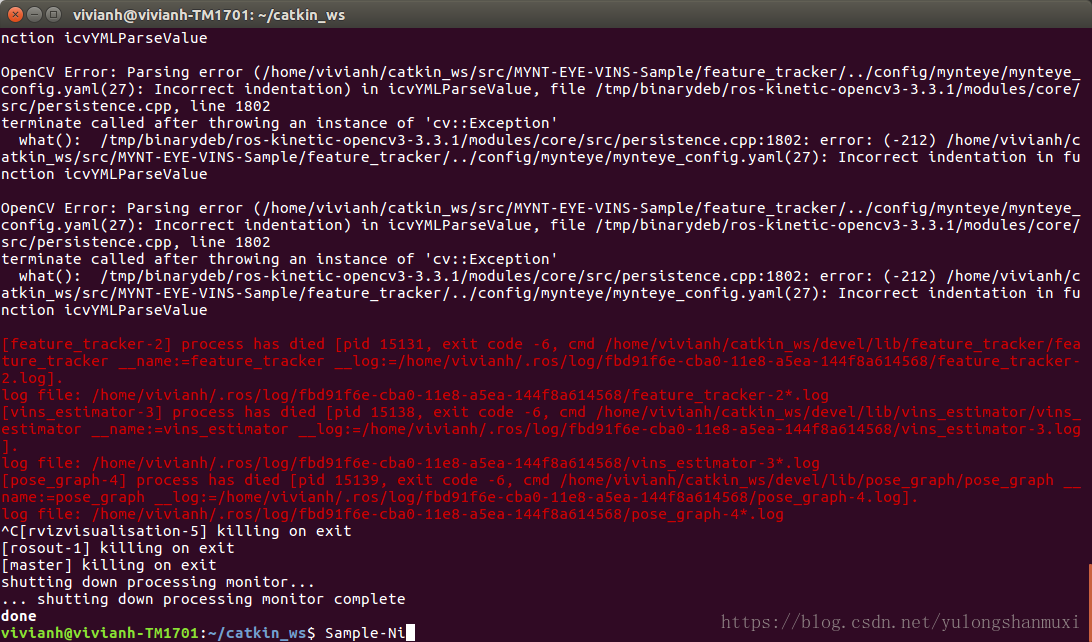
接下来是记录自己碰到的问题运行不成功,之前一直卡在这里,不会查看错误信息,提示的很明显。配置文件27行,不正确的缩进。














 4822
4822











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









