







最近的工作涉及到点云重建部分,所以写下这些博客,用来作为笔记,整理自己的思路。这是该部分文章的第一篇,主要介绍点云对齐的方法。物体从扫描到生成完整的网格的过程:
1.通过扫描仪获得物体的多片点云数据
2.任意两片点云之间进行粗对齐,获得精细对齐的初始位置
3.使用ICP算法进行精细对齐
4.全局优化多片点云的位置
5.去除点云的重叠部分,并且网格化
1.0 三维对齐问题&背景
对实物进行扫描时,往往不能在同一坐标系下将产品的几何数据一次测量。其原因是产品的尺寸超过了扫描仪的测量范围,并且物体之间相互遮挡,扫描仪在一个角度不太可能扫描到物体的完整数据。得到多篇点云数据后,我们需要一种技术将多片点云数据旋转平移到统一的坐标系下,使它们能够组成一个完整的物体,这种技术就是点云对齐。
点云对齐是任意位置的点云的重叠部分相互匹配的过程,分为刚性和非刚性,我们主要介绍刚性点云对齐。刚性对齐计算一个刚性变换矩阵,把一片点云旋转平移过去,保证两片点云对应部分尽可能多的重合。解决的办法可以将他转化成一个优化问题,即在适当的度量空间中,通过求解最佳旋转和平移转换使这样的数据集之间的重叠区域之间的距离是最小的。
1.1 点云粗略对齐常用方法
1. 固定扫描,将物体放在旋转台上,根据旋转角度计算旋转矩阵进行对齐
2. 在物体表面贴标志点,根据标志点的位置指导点云对齐
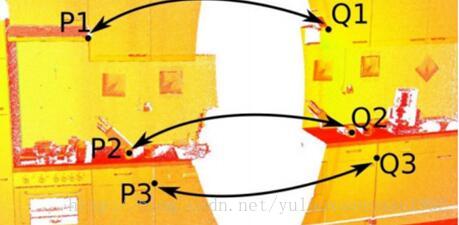
3. 扫描两片点云后,手工的在两片点云上选择三对匹配点,指导点云对齐
1.1.1投票法
由于刚体变换只有6个自由度,所以只要确定3对匹配点,就能计算刚体变换。在点云P和Q上分别任选一个基(3个点),计算刚体变换Ti,利用Ti平移和旋转点云,计算P和Q中重合的点的数目ki,如果ki足够大,Ti可以作为结果,否则重复以上过程。如果P中有M个点,Q中有N个点,最差的时间复杂度为O(M^3 * N^3)
1.1.2改进的投票法
在点云P中选取一个基Bi,然后在模型Q中寻找所有可以和Bi相匹配的基,计算所有刚体变换,选择一个最优的Ti,如果Ti足够好,那么作为结果,否则重复以上过程,最差时间复杂度O(M^3 * N^3)
小结:投票法的优点是可以忍受大量的噪声,在较小重叠情况下也能得到满意的结果。但是时间复杂度过高,对于工业界应用,不可接受。
1.1.3特征法
计算两片点云的特征,利用特征的相似性加快两片点云中基的选择,高维特征计算复杂,低维特征区分率不高。
特征是用来辅助匹配基的选择,由于点云对齐本质上是对点云进行平移和旋转操作,所以我们希望特征具有旋转和平移不变性,并且我们希望两片点云中非匹配点的特征是不同的,所以特征需要具备一定的区分率。
PFH特征:对于点云中每个点p,计算p邻域半径r内的点集F,对于F中任意一对点pi和pj(i不等于j)以及它们的法向量ni和nj(pi是两点连线与其法向量构成的角度较小的点),我们定义一个(u,v, w)坐标系:
u = ni
v = (pj - pi) * u 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 592
592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









