






文章目录
AMG8833介绍
内部框图
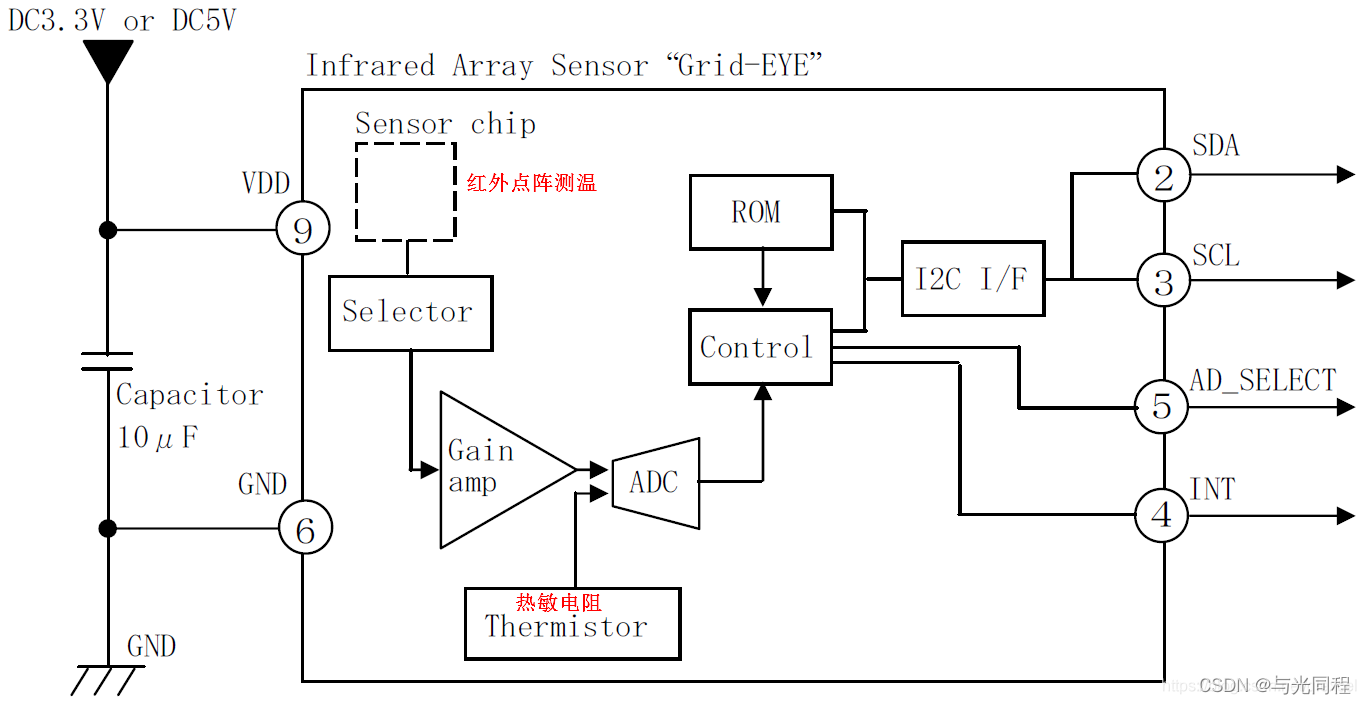 可以看到AMG8833的内部有红外点阵测温,并且还带有一个热敏电阻。使用同一个ADC进行采样,然后送给Control。
可以看到AMG8833的内部有红外点阵测温,并且还带有一个热敏电阻。使用同一个ADC进行采样,然后送给Control。
器件参数
测温点数:64(8x8的矩阵)
帧率:10帧每秒或1帧每秒
红外测温分辨率:0.25℃
热敏电阻测量温度范围:-20℃~80℃
热敏电阻分辨率:0.0625℃
红外测温的准确度:High gain误差在2.5℃以内;Low gain误差在3℃以内。
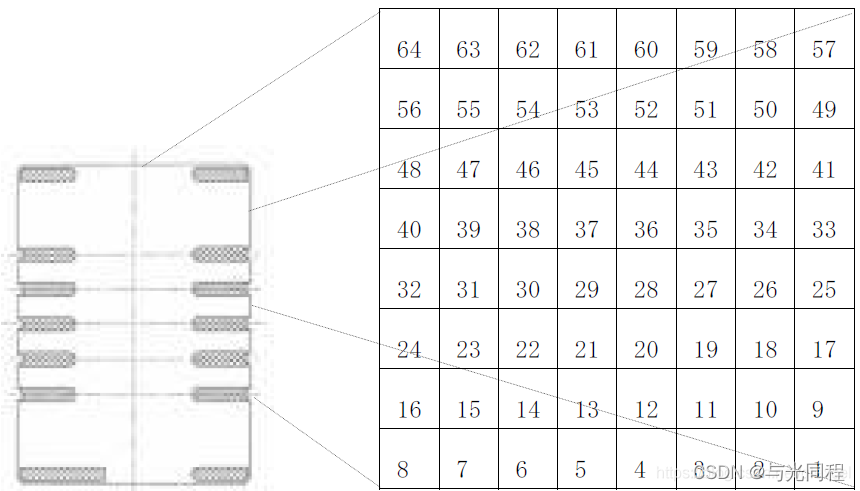
点阵的排布顺序
从右到左、从下到上。因此右下角才是第一个点。
原理图
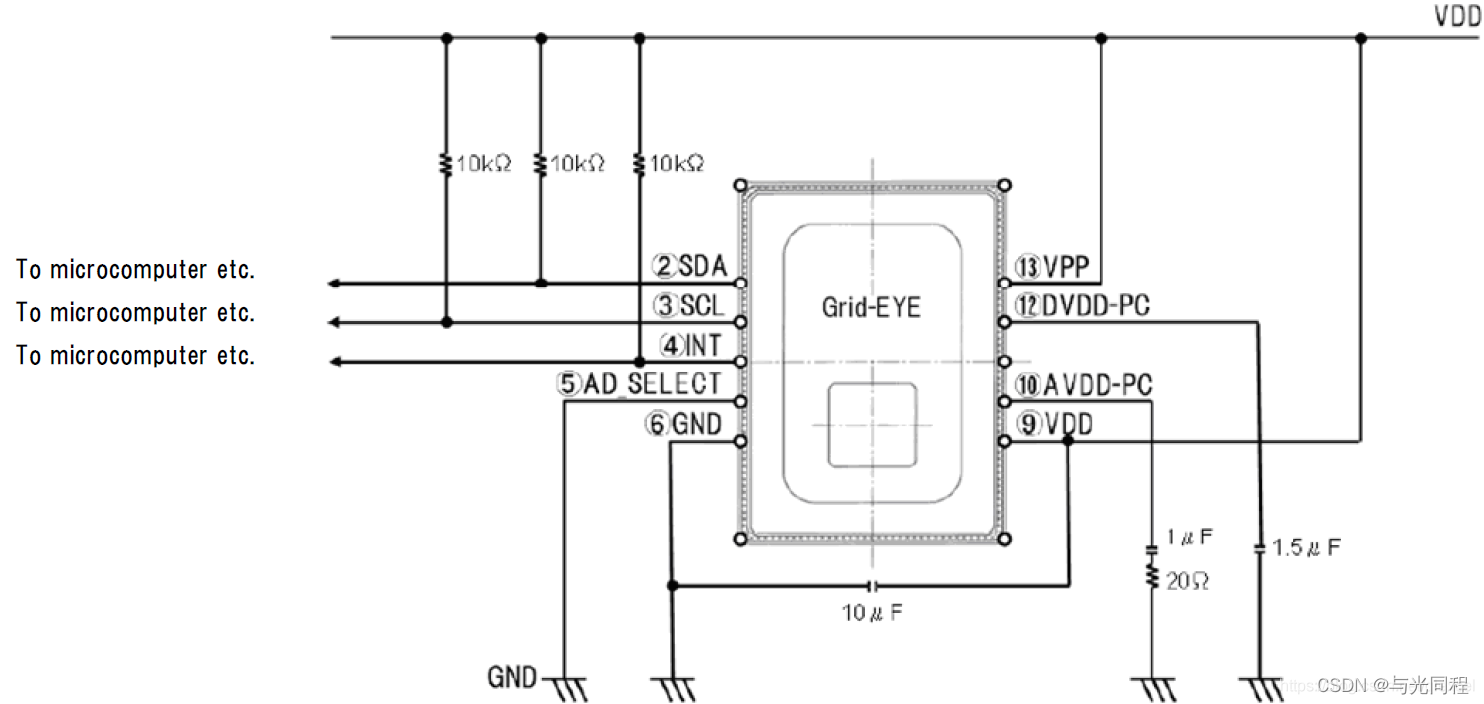 2脚和3脚是IIC通信引脚,最大速度400K。
2脚和3脚是IIC通信引脚,最大速度400K。
4脚是中断引脚,如果INT control寄存器中激活了中断功能,当发生中断,此引脚会拉低。
5脚是IIC设备地址选择脚。拉低,设备地址为110 1000,即0x68。拉高,设备地址为110 1001,即0x69。
设备地址占据高7位,最低位是读写位,0表示写,1表示读。所以当5脚拉低,进行写操作时,8位数据为:1101 0000,即0xD0,读操作时,8位数据为:1101 0001,即0xD1。
6脚为地。
9脚和13脚为VDD,可以3.3V或5V供电。
10脚接一个电容和电阻。
12脚接一个电容。
内部寄存器
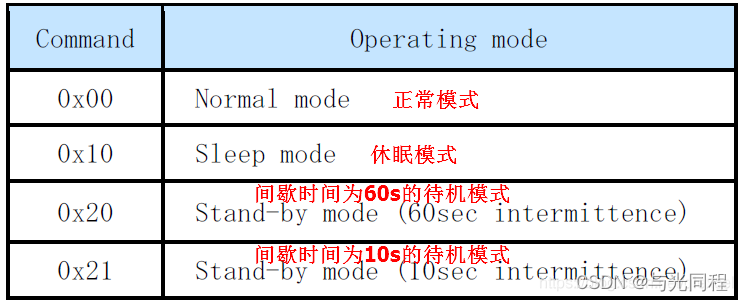
1、Power Control寄存器:
设置AMG8833的工作模式
2、Reset寄存器:
进行软复位。

有两种复位方式:
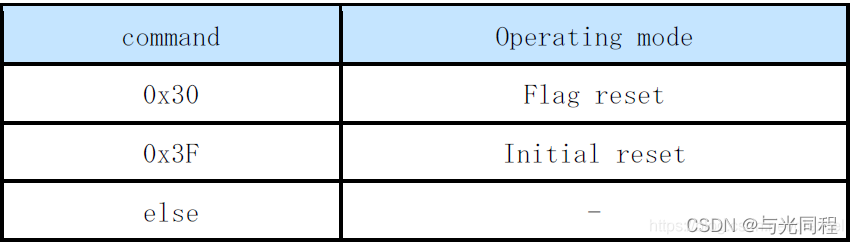
Flag Reset会清除Status寄存器(0x04)、中断标志、中断表(0x10~0x17)
Initial Reset会复位标志,并使AMG8833的参数恢复初始。
3、Frame Rate寄存器:设定帧率

bit0: Setting Frame Mode
1: 1FPS
0: 10FPS
4、Interrupt Control寄存器:
配置中断功能

bit1: INTMOD
1: Absolute Value Interrupt Mode
0: Difference Interrupt Mode
bit0: INTEN
1: INT 引脚输出使能
0: INT 引脚禁止输出(保持高阻状态)
5、Status寄存器:
溢出标志和中断标志

bit3: OVF_THS
1: 热敏电阻温度输出溢出标志
(Value of Thermistor (0x0E、0x0F) : 0xFFF)
bit2: OVF_IRS
1: 红外温度输出溢出标志
(Value of Temperature Register(0x80~0xFF): 0xFFF)
bit1: INTF
1: 发生中断标志
(Value of Interrupt Table Register(0x10~0x17): Except for 0x00)
6、Status Clear寄存器:
清除溢出标志和中断标志
bit3: OVT_CLR
1: 清除热敏电阻温度输出溢出标志
bit2: OVS_CLR
1: 清除红外温度输出溢出标志
bit1: INTCLR
1: 清除中断标志
7、Average寄存器:
设置移动平均输出模式
bit5: MAMOD
1::Twice moving average Output Mode
0:No moving average
8、Interrupt Level寄存器:
设置发生中断的上限值、下限值、迟滞值。
INT_LVL_H [11:0]:中断上限值,当温度高于此值,输出中断并且设置Interrupt Table寄存器。
INT_LVL_L [11:0]:中断下限值,当温度低于此值,输出中断并且设置Interrupt Table寄存器。
INT_HYS [11:0]:设置上限值、下限值的迟滞值,类似于施密特触发器。
上述3个数据都是12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.25℃。
9、Thermistor寄存器:
热敏电阻测量的温度值
有12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.0625℃。举例如下:
10、Interrupt Table寄存器:
显示哪一个像素点发生了中断
当64个像素点中的某一个点的温度值高于或低于了Interrupt Level寄存器中设置的上下限,就会在Interrupt Table寄存器的对应位设置值。值为1代表发生了中断,0表示没有。
11、Temperature寄存器:
红外点阵测量的温度值
有12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.25℃。举例如下:
0x80和0x81保存的是第一个像素的温度值,1-64像素对应地址为0x80~0xFF。
注:
(1)1 - 64像素(0x80~0xFF)的温度值是一起更新的,不需要任何指令。
(2)0x80~0xFF的数据是一次读出的,所以不用担心新的温度值和旧的温度值会混在一起。
HI3516驱动开发
为了避免麻烦,并且这里的传输数据量并不是非常大,所以直接用IO读取数据
所以如果要用其他LINUX开发板底层函数必须根据你们的板子重新编写。
/*
* @Description:
* @Autor: YURI
* @Date: 2022-01-21 17:14:06
* @LastEditors: YURI
* @LastEditTime: 2022-01-31 00:03:07
*/
#ifndef amg8833_H
#define amg8833_H
#define GPIO0_BASE_ADDR 0x120D0000
#define GPIO0_DIR_ADDR ((GPIO0_BASE_ADDR) + (0x400))
#define GPIO0_DATA_OUT_ADDR ((GPIO0_BASE_ADDR) + (0x000))
#define GPIO0_DATA ((GPIO0_BASE_ADDR) + (0x3FC))
#define GPIO1_BASE_ADDR 0x120D1000
#define GPIO1_DIR_ADDR ((GPIO1_BASE_ADDR) + (0x400))
#define GPIO1_DATA_OUT_ADDR ((GPIO1_BASE_ADDR) + (0x000))
#define GPIO1_DATA ((GPIO1_BASE_ADDR) + (0x3FC))
#define GPIO2_BASE_ADDR 0x120D2000
#define GPIO2_DIR_ADDR ((GPIO2_BASE_ADDR) + (0x400))
#define GPIO2_DATA_OUT_ADDR ((GPIO2_BASE_ADDR) + (0x000))
#define GPIO2_DATA ((GPIO2_BASE_ADDR) + (0x3FC))
#define GPIO3_BASE_ADDR 0x120D3000
#define GPIO3_DIR_ADDR ((GPIO3_BASE_ADDR) + (0x400))
#define GPIO3_DATA_OUT_ADDR ((GPIO3_BASE_ADDR) + (0x000))
#define GPIO3_DATA ((GPIO3_BASE_ADDR) + (0x3FC))
#define GPIO4_BASE_ADDR 0x120D4000
#define GPIO4_DIR_ADDR ((GPIO4_BASE_ADDR) + (0x400))
#define GPIO4_DATA_OUT_ADDR ((GPIO4_BASE_ADDR) + (0x000))
#define GPIO4_DATA ((GPIO4_BASE_ADDR) + (0x3FC))
#define GPIO5_BASE_ADDR 0x120D5000
#define GPIO5_DIR_ADDR ((GPIO5_BASE_ADDR) + (0x400))
#define GPIO5_DATA_OUT_ADDR ((GPIO5_BASE_ADDR) + (0x000))
#define GPIO5_DATA ((GPIO5_BASE_ADDR) + (0x3FC))
#define GPIO6_BASE_ADDR 0x120D6000
#define GPIO6_DIR_ADDR ((GPIO6_BASE_ADDR) + (0x400))
#define GPIO6_DATA_OUT_ADDR ((GPIO6_BASE_ADDR) + (0x000))
#define GPIO6_DATA ((GPIO6_BASE_ADDR) + (0x3FC))
#define GPIO7_BASE_ADDR 0x120D7000
#define GPIO7_DIR_ADDR ((GPIO7_BASE_ADDR) + (0x400))
#define GPIO7_DATA_OUT_ADDR ((GPIO7_BASE_ADDR) + (0x000))
#define GPIO7_DATA ((GPIO7_BASE_ADDR) + (0x3FC))
#define GPIO8_BASE_ADDR 0x120D8000
#define GPIO8_DIR_ADDR ((GPIO8_BASE_ADDR) + (0x400))
#define GPIO8_DATA_OUT_ADDR ((GPIO8_BASE_ADDR) + (0x000))
#define GPIO8_DATA ((GPIO8_BASE_ADDR) + (0x3FC))
#define GPIO9_BASE_ADDR 0x120D9000
#define GPIO9_DATA_OUT_ADDR ((GPIO9_BASE_ADDR) + (0x000))
#define GPIO9_SET_DATA_ADDR ((GPIO9_DATA_OUT_ADDR) + (0x200))
#define GPIO9_DATA ((GPIO9_BASE_ADDR) + (0x3FC))
#define GPIO10_BASE_ADDR 0x120DA000
#define GPIO10_DIR_ADDR ((GPIO10_BASE_ADDR) + (0x400))
#define GPIO10_DATA_OUT_ADDR ((GPIO10_BASE_ADDR) + (0x000))
#define GPIO10_DATA ((GPIO10_BASE_ADDR) + (0x3FC))
#define GPIO11_BASE_ADDR 0x120DB000
#define GPIO11_DIR_ADDR ((GPIO11_BASE_ADDR) + (0x400))
#define GPIO11_DATA_OUT_ADDR ((GPIO11_BASE_ADDR) + (0x000))
#define GPIO11_DATA ((GPIO11_BASE_ADDR) + (0x3FC))
enum amg8833_pin_direction{amg8833_IN=0,amg8833_OUT=1};
#define AMG8833_DELAY_TIME 4
//amg8833 关键控制器
typedef struct
{
volatile unsigned long *pin_mutx; //管脚选择地址
volatile unsigned long *pin_dir; //管脚方向地址
volatile unsigned long *pin_data;//控制管脚的数据组在的位置
volatile int pin_index; //管脚号
}amg8833_pin;
//amg8833 硬件控制器
typedef struct
{
amg8833_pin *sck; // 时钟
amg8833_pin *sda; // 数据线
amg8833_pin *inter; // 中断线
amg8833_pin *ad0; // 地址选择
}amg8833_ctl;
#define AMG88xx_PIXEL_TEMP_CONVERSION 0.25
#define AMG88xx_THERMISTOR_CONVERSION 0.0625
enum
{
AMG88xx_PCTL = 0x00,
AMG88xx_RST = 0x01,
AMG88xx_FPSC = 0x02,
AMG88xx_INTC = 0x03,
AMG88xx_STAT = 0x04,
AMG88xx_SCLR = 0x05,
//0x06 reserved
AMG88xx_AVE = 0x07,
AMG88xx_INTHL = 0x08,
AMG88xx_INTHH = 0x09,
AMG88xx_INTLL = 0x0A,
AMG88xx_INTLH = 0x0B,
AMG88xx_IHYSL = 0x0C,
AMG88xx_IHYSH = 0x0D,
AMG88xx_TTHL = 0x0E,
AMG88xx_TTHH = 0x0F,
AMG88xx_INT_OFFSET = 0x010,
AMG88xx_PIXEL_OFFSET = 0x80
};
enum power_modes{
AMG88xx_NORMAL_MODE = 0x00,
AMG88xx_SLEEP_MODE = 0x01,
AMG88xx_STAND_BY_60 = 0x20,
AMG88xx_STAND_BY_10 = 0x21
};
enum sw_resets {
AMG88xx_FLAG_RESET = 0x30,
AMG88xx_INITIAL_RESET = 0x3F
};
enum frame_rates {
AMG88xx_FPS_10 = 0x00,
AMG88xx_FPS_1 = 0x01
};
enum int_enables{
AMG88xx_INT_DISABLED = 0x00,
AMG88xx_INT_ENABLED = 0x01
};
enum int_modes {
AMG88xx_DIFFERENCE = 0x00,
AMG88xx_ABSOLUTE_VALUE = 0x01
};
#define AMG88xx_ADR 0xD0 //5脚拉低时的设备地址
#endif
/*
* @Description:
* @Autor: YURI
* @Date: 2022-01-30 17:18:51
* @LastEditors: YURI
* @LastEditTime: 2022-01-31 00:33:38
*/
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/device.h>
#include <asm/uaccess.h>
#include <asm/irq.h>
#include <linux/slab.h>
#include <asm/io.h>
#include <linux/delay.h>
#include "amg8833.h"
amg8833_ctl amg8833;
#define DEVICE_NAME "amg8833"
/**
* @description: amg8833 管脚初始化
* @param {unsigned long} base_addr
* @param {unsigned long} mutex_addr
* @param {int} mutex_select
* @param {int} pin_direction
* @param {int} pinindex
* @param {int} pindefaultvalue
* @return {*}
* @author: YURI
*/
static amg8833_pin* amg8833_pin_init(unsigned long base_addr,unsigned long mutex_addr,int mutex_select,int pin_direction,int pinindex,int pindefaultvalue)
{
amg8833_pin* pin=(amg8833_pin*)kmalloc(sizeof(amg8833_pin),GFP_KERNEL);
pin->pin_dir = (volatile unsigned long *)ioremap(base_addr+(0x400), 32);//方向选择寄存器
pin->pin_data = (volatile unsigned long *)ioremap(base_addr+(0x3FC), 32);//数据寄存器
pin->pin_mutx = (volatile unsigned long *)ioremap(mutex_addr, 32); //功能选择寄存器
pin->pin_index = pinindex;
*(pin->pin_data)|=(pindefaultvalue<<pinindex);
*(pin->pin_mutx)=mutex_select;
*(pin->pin_dir )=(pin_direction<<pinindex);
return pin;
}
/**
* @description: amg8833 管脚恢复
* @param {amg8833_pin*} pin
* @return {*}
* @author: YURI
*/
static void amg8833_pin_uninit(amg8833_pin* pin)
{
iounmap(pin->pin_data);
iounmap(pin->pin_mutx);
iounmap(pin->pin_dir);
kfree(pin);
}
/**
* @description: 改变输入输出方向
* @param {amg8833_pin*} pin
* @param {int} pin_direction
* @return {*}
* @author: YURI
*/
static inline void amg8833_pin_change_direction(amg8833_pin* pin,int pin_direction)
{
*(pin->pin_dir )=(pin_direction<<pin->pin_index);
}
/**
* @description: 设置管脚数值
* @param {amg8833_pin*} pin
* @param {int} value
* @return {*}
* @author: YURI
*/
static inline void amg8833_pin_change_value(amg8833_pin* pin,int value)
{
//printk("KERNEL VALUE %d",value);
if(value) *(pin->pin_data)|=(1<<(pin->pin_index));
else *(pin->pin_data)&=~(1<<(pin->pin_index));
}
/**
* @description: 反转管脚
* @param {amg8833_pin*} pin
* @return {*}
* @author: YURI
*/
static inline void amg8833_pin_toggle_value(amg8833_pin* pin)
{
if(*(pin->pin_data)&(1<<(pin->pin_index))) *(pin->pin_data)&=~(1<<(pin->pin_index));
else *(pin->pin_data)|=(1<<(pin->pin_index));
}
/**
* @description: 获取管脚电平
* @param {amg8833_pin*} pin
* @return {*}
* @author: YURI
*/
static inline int amg8833_pin_get_value(amg8833_pin* pin)
{
if(*(pin->pin_data)&(1<<(pin->pin_index)))return 1;
else return 0;
}
/**
* @description: amg8833结构体初始化,初始化所有管脚
* @param {*}
* @return {*}
* @author: YURI
*/
static void amg8833_ctl_init(void)
{
amg8833.sck =amg8833_pin_init(GPIO0_BASE_ADDR,0X112F0034,0X520,amg8833_OUT,6,0);//0_6
amg8833.sda =amg8833_pin_init(GPIO2_BASE_ADDR,0X114F0068,0X520,amg8833_OUT,3,0);//2_3
amg8833.inter =amg8833_pin_init(GPIO8_BASE_ADDR,0X112F0040,0X524,amg8833_OUT,7,0);//8_7
amg8833.ad0 =amg8833_pin_init(GPIO7_BASE_ADDR,0X112F0044,0X520,amg8833_OUT,0,0);//7_0
}
/**
* @description: 释放硬件资源
* @param {*}
* @return {*}
* @author: YURI
*/
static void amg8833_ctl_uninit(void)
{
amg8833_pin_uninit(amg8833.sck);
amg8833_pin_uninit(amg8833.sda);
amg8833_pin_uninit(amg8833.inter);
amg8833_pin_uninit(amg8833.ad0);
}
/**
* @description:IIC开始信号 当SLK高电平 SDA由高变低
* @param {*}
* @return {*}
* @author: YURI
*/
void amg_iic_start(void)
{
amg8833_pin_change_direction(amg8833.sda,amg8833_OUT);
amg8833_pin_change_value(amg8833.sda,1);
amg8833_pin_change_value(amg8833.sck,1);
udelay(AMG8833_DELAY_TIME);
amg8833_pin_change_value(amg8833.sda,0);
udelay(AMG8833_DELAY_TIME);
amg8833_pin_change_value(amg8833.sck,0);
}
/**
* @description:IIC结束信号 当SLK高电平 SDA由低变高
* @param {*}
* @return {*}
* @author: YURI
*/
void amg_iic_stop(void)
{
amg8833_pin_change_direction(amg8833.sda,amg8833_OUT);
amg8833_pin_change_value(amg8833.sck,0);
amg8833_pin_change_value(amg8833.sda,0);
udelay(AMG8833_DELAY_TIME);
amg8833_pin_change_value(amg8833.sck,1);
amg8833_pin_change_value(amg8833.sda,1);
udelay(AMG8833_DELAY_TIME);
}
/**
* @description: 主机SCL拉高,读取从机SDA的电平,为低电平表示产生应答
* @param {*}
* @return {*}
* @author: YURI
*/
unsigned char amg_iic_wait_ack(void)
{
unsigned char ucErrTime=0;
amg8833_pin_change_direction(amg8833.sda,amg8833_IN);
amg8833_pin_change_value(amg8833.sda,1);udelay(AMG8833_DELAY_TIME);
amg8833_pin_change_value(amg8833.sck,1);udelay(AMG8833_DELAY_TIME);
while(amg8833_pin_get_value(amg8833.sda))
{
ucErrTime++;
if(ucErrTime>250)
{
amg_iic_stop();
return 1;
}
}
amg8833_pin_change_value(amg8833.sck,0);//时钟输出0
return 0;
}
//产生ACK应答
//1.先拉低SCL,再拉低SDA
//2.拉高SCL
//3.拉低SCL
void amg_iic_ack(void)
{
amg8833_pin_change_value(amg8833.sck,0);
amg8833_pin_change_direction(amg8833.sda,amg8833_OUT);
amg8833_pin_change_value(amg8833.sda,0);
udelay(AMG8833_DELAY_TIME/2);
amg8833_pin_change_value(amg8833.sck,1);
udelay(AMG8833_DELAY_TIME/2);
amg8833_pin_change_value(amg8833.sck,0);
}
//不产生ACK应答
//1.先拉低SCL,再拉高SDA
//2.拉高SCL
//3.拉低SCL
void amg_iic_nack(void)
{
amg8833_pin_change_value(amg8833.sck,0);
amg8833_pin_change_direction(amg8833.sda,amg8833_OUT);
amg8833_pin_change_value(amg8833.sda,1);
udelay(AMG8833_DELAY_TIME/2);
amg8833_pin_change_value(amg8833.sck,1);
udelay(AMG8833_DELAY_TIME/2);
amg8833_pin_change_value(amg8833.sck,0);
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void amg_iic_send_byte(unsigned char txd)
{
unsigned char t;
amg8833_pin_change_direction(amg8833.sda,amg8833_OUT);
amg8833_pin_change_value(amg8833.sck,0);//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
if((txd&0x80)>>7)
amg8833_pin_change_value(amg8833.sda,1);
else
amg8833_pin_change_value(amg8833.sda,0);
txd<<=1;
udelay(AMG8833_DELAY_TIME/2);
amg8833_pin_change_value(amg8833.sck,1);
udelay(AMG8833_DELAY_TIME/2);
amg8833_pin_change_value(amg8833.sck,0);
udelay(AMG8833_DELAY_TIME/2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
unsigned char amg_iic_read_byte(void)
{
unsigned char i,receive=0;
amg8833_pin_change_direction(amg8833.sda,amg8833_IN);
amg8833_pin_change_value(amg8833.sda,1);;
udelay(4);
for(i=0;i<8;i++ )
{
receive<<=1;
amg8833_pin_change_value(amg8833.sck,0);
udelay(AMG8833_DELAY_TIME);
amg8833_pin_change_value(amg8833.sck,1);
udelay(AMG8833_DELAY_TIME);
if(amg8833_pin_get_value(amg8833.sda))
receive |= 0x01;
udelay(AMG8833_DELAY_TIME);
}
amg8833_pin_change_value(amg8833.sck,0);
return receive;
}
//IIC写一个字节数据
unsigned char amg_iic_write_1_byte(unsigned char SlaveAddress, unsigned char REG_Address,unsigned char REG_data)
{
amg_iic_start();
amg_iic_send_byte(SlaveAddress);
if(amg_iic_wait_ack())
{
amg_iic_stop();//释放总线
return 1;//没应答则退出
}
amg_iic_send_byte(REG_Address);
amg_iic_wait_ack();
udelay(5);
amg_iic_send_byte(REG_data);
amg_iic_wait_ack();
amg_iic_stop();
return 0;
}
//IIC读一个字节数据
unsigned char amg_iic_read_1_byte(unsigned char SlaveAddress, unsigned char REG_Address,unsigned char *REG_data)
{
amg_iic_start();
amg_iic_send_byte(SlaveAddress);//发写命令
if(amg_iic_wait_ack())
{
amg_iic_stop();//释放总线
return 1;//没应答则退出
}
amg_iic_send_byte(REG_Address);
amg_iic_wait_ack();
udelay(5);
amg_iic_start();
amg_iic_send_byte(SlaveAddress|0x01);//发读命令
amg_iic_wait_ack();
*REG_data = amg_iic_read_byte();
amg_iic_stop();
return 0;
}
//I2C读多个字节数据
unsigned char amg_iic_read_n_byte(unsigned char SlaveAddress, unsigned char REG_Address, unsigned char *buf, uint16_t len)
{
amg_iic_start();
amg_iic_send_byte(SlaveAddress);//发写命令
if(amg_iic_wait_ack())
{
amg_iic_stop();//释放总线
return 1;//没应答则退出
}
amg_iic_send_byte(REG_Address);
amg_iic_wait_ack();
udelay(5);
amg_iic_start();
amg_iic_send_byte(SlaveAddress|0x01);//发读命令
amg_iic_wait_ack();
while(len)
{
*buf = amg_iic_read_byte();
if(1 == len)
{
amg_iic_nack();
}
else
{
amg_iic_ack();
}
buf++;
len--;
}
amg_iic_stop();
return 0;
}
//I2C写多个字节数据
unsigned char amg_iic_write_n_byte(unsigned char SlaveAddress, unsigned char REG_Address, unsigned char *buf, uint16_t len)
{
amg_iic_start();
amg_iic_send_byte(SlaveAddress);//发写命令
if(amg_iic_wait_ack())
{
amg_iic_stop();//释放总线
return 1;//没应答则退出
}
amg_iic_send_byte(REG_Address);
amg_iic_wait_ack();
while(len--)
{
amg_iic_send_byte(*buf++);
amg_iic_wait_ack();
}
amg_iic_stop();
return 0;
}
/**
* @description: 打开操作
* @param {inode} *inode
* @param {file} *file
* @return {*}
* @author: YURI
*/
static int amg8833_drv_open(struct inode *inode, struct file *file)
{
amg8833_pin_change_value(amg8833.ad0,0);
//enter normal mode
amg_iic_write_1_byte(AMG88xx_ADR,AMG88xx_PCTL,AMG88xx_NORMAL_MODE);
//software reset
amg_iic_write_1_byte(AMG88xx_ADR,AMG88xx_RST,AMG88xx_INITIAL_RESET);
//set to 10 FPS
amg_iic_write_1_byte(AMG88xx_ADR,AMG88xx_FPSC,AMG88xx_FPS_10);
return 0;
}
/**
* @description: 释放操作
* @param {inode} *pinode
* @param {file} *pfile
* @return {*}
* @author: YURI
*/
static int amg8833_drv_release(struct inode *pinode , struct file *pfile)
{
return 0;
}
/**
* @description:
* @param {file} *file
* @param {char __user} *buf
* @param {size_t} count
* @param {loff_t} *ppos
* @return {*}
* @author: YURI
*/
static ssize_t amg8833_drv_read(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{
uint8_t rawArray[128],i;
local_irq_disable();
amg_iic_read_n_byte(AMG88xx_ADR,AMG88xx_PIXEL_OFFSET,rawArray,128);
local_irq_enable();
copy_to_user(buf,rawArray, count);
return count;
}
static int major = (-1); /* 初始化为无效值 */
static struct class *amg8833_drv_class;
static struct file_operations amg8833_drv_fops = {
.owner = THIS_MODULE,
.open = amg8833_drv_open,
.release = amg8833_drv_release,
.read = amg8833_drv_read,
};
/* 驱动入口函数 */
static int amg8833_drv_init(void)
{
printk("KERNEL INIT amg8833 \r\n");
major = register_chrdev(0, "amg8833_drv", &amg8833_drv_fops); // 注册, 告诉内核,返回值major为自动分配的主设备号
amg8833_drv_class = class_create(THIS_MODULE, "amg8833drv");
device_create(amg8833_drv_class, NULL, MKDEV(major, 0), NULL, DEVICE_NAME);
amg8833_ctl_init();
return 0;
}
/* 驱动出口函数 */
static void amg8833_drv_exit(void)
{
unregister_chrdev(major, "amg8833_drv"); /* 卸载驱动程序,告诉内核 */
device_destroy(amg8833_drv_class, MKDEV(major, 0));
class_destroy(amg8833_drv_class);
amg8833_ctl_uninit();
}
module_init(amg8833_drv_init);
module_exit(amg8833_drv_exit);
MODULE_LICENSE("Dual BSD/GPL");
测试代码
/*
* @Description:
* @Autor: YURI
* @Date: 2022-01-30 18:34:31
* @LastEditors: YURI
* @LastEditTime: 2022-01-31 02:35:01
*/
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include "framebuffer.h"
#include "opencv_mat.h"
#define AMG88xx_PIXEL_TEMP_CONVERSION 0.25
using namespace cv;
#define MIN_TEMP 0
#define MAX_TEMP 30
const unsigned short camColors[] = {0x480F,
0x400F,0x400F,0x400F,0x4010,0x3810,0x3810,0x3810,0x3810,0x3010,0x3010,
0x3010,0x2810,0x2810,0x2810,0x2810,0x2010,0x2010,0x2010,0x1810,0x1810,
0x1811,0x1811,0x1011,0x1011,0x1011,0x0811,0x0811,0x0811,0x0011,0x0011,
0x0011,0x0011,0x0011,0x0031,0x0031,0x0051,0x0072,0x0072,0x0092,0x00B2,
0x00B2,0x00D2,0x00F2,0x00F2,0x0112,0x0132,0x0152,0x0152,0x0172,0x0192,
0x0192,0x01B2,0x01D2,0x01F3,0x01F3,0x0213,0x0233,0x0253,0x0253,0x0273,
0x0293,0x02B3,0x02D3,0x02D3,0x02F3,0x0313,0x0333,0x0333,0x0353,0x0373,
0x0394,0x03B4,0x03D4,0x03D4,0x03F4,0x0414,0x0434,0x0454,0x0474,0x0474,
0x0494,0x04B4,0x04D4,0x04F4,0x0514,0x0534,0x0534,0x0554,0x0554,0x0574,
0x0574,0x0573,0x0573,0x0573,0x0572,0x0572,0x0572,0x0571,0x0591,0x0591,
0x0590,0x0590,0x058F,0x058F,0x058F,0x058E,0x05AE,0x05AE,0x05AD,0x05AD,
0x05AD,0x05AC,0x05AC,0x05AB,0x05CB,0x05CB,0x05CA,0x05CA,0x05CA,0x05C9,
0x05C9,0x05C8,0x05E8,0x05E8,0x05E7,0x05E7,0x05E6,0x05E6,0x05E6,0x05E5,
0x05E5,0x0604,0x0604,0x0604,0x0603,0x0603,0x0602,0x0602,0x0601,0x0621,
0x0621,0x0620,0x0620,0x0620,0x0620,0x0E20,0x0E20,0x0E40,0x1640,0x1640,
0x1E40,0x1E40,0x2640,0x2640,0x2E40,0x2E60,0x3660,0x3660,0x3E60,0x3E60,
0x3E60,0x4660,0x4660,0x4E60,0x4E80,0x5680,0x5680,0x5E80,0x5E80,0x6680,
0x6680,0x6E80,0x6EA0,0x76A0,0x76A0,0x7EA0,0x7EA0,0x86A0,0x86A0,0x8EA0,
0x8EC0,0x96C0,0x96C0,0x9EC0,0x9EC0,0xA6C0,0xAEC0,0xAEC0,0xB6E0,0xB6E0,
0xBEE0,0xBEE0,0xC6E0,0xC6E0,0xCEE0,0xCEE0,0xD6E0,0xD700,0xDF00,0xDEE0,
0xDEC0,0xDEA0,0xDE80,0xDE80,0xE660,0xE640,0xE620,0xE600,0xE5E0,0xE5C0,
0xE5A0,0xE580,0xE560,0xE540,0xE520,0xE500,0xE4E0,0xE4C0,0xE4A0,0xE480,
0xE460,0xEC40,0xEC20,0xEC00,0xEBE0,0xEBC0,0xEBA0,0xEB80,0xEB60,0xEB40,
0xEB20,0xEB00,0xEAE0,0xEAC0,0xEAA0,0xEA80,0xEA60,0xEA40,0xF220,0xF200,
0xF1E0,0xF1C0,0xF1A0,0xF180,0xF160,0xF140,0xF100,0xF0E0,0xF0C0,0xF0A0,
0xF080,0xF060,0xF040,0xF020,0xF800};
short signed_To_unsigned(short val)
{
short absVal = (val & 0x7FF);
return (val & 0x800) ? 0 - absVal : absVal ;
}
opencv_mat* mat_convert;
framebuffer *fb;
#define RGB565_RED 0xf800
#define RGB565_GREEN 0x07e0
#define RGB565_BLUE 0x001f
int main(int argc,void **argv)
{
int fd,i;
Mat image,show;
char* filename=NULL;
unsigned char buf[128];
unsigned char rgbbuf[8*8*3];
int color_index=0;
short data[64];
short recast;
short converted;
fb=new framebuffer("/dev/fb0");
filename = (char*)argv[1];
fd = open(filename, O_RDWR);//打开dev/firstdrv设备文件
mat_convert=new opencv_mat(8,8);
if (fd < 0)//小于0说明没有成功
{
printf("error, can't open %s\n", filename);
return 0;
}
while (1)
{
read(fd,buf,128);
for(i=0; i<64; i++)
{
unsigned char pos = i *2;
recast = ((short)buf[pos + 1] << 8) | ((short)buf[pos]);
converted = signed_To_unsigned(recast) * AMG88xx_PIXEL_TEMP_CONVERSION;
data[i] = converted;
}
for(int j=0;j<8;j++){
for(int k=0;k<8;k++)
{
color_index= (data[8*j+k]-MIN_TEMP) *( 255/(MAX_TEMP-MIN_TEMP));
if(color_index<0){
rgbbuf[8*3*j+3*k]=0;
rgbbuf[8*3*j+3*k+1]=0;
rgbbuf[8*3*j+3*k+2]=0;
}else if(color_index>255){
rgbbuf[8*3*j+3*k]=0xFF;
rgbbuf[8*3*j+3*k+1]=0xFF;
rgbbuf[8*3*j+3*k+2]=0xFF;
}else{
rgbbuf[8*3*j+3*k+2]=(camColors[color_index]&RGB565_BLUE)<<3;
rgbbuf[8*3*j+3*k+1]=(camColors[color_index]&RGB565_GREEN)>>3;
rgbbuf[8*3*j+3*k]=(camColors[color_index]&RGB565_RED)>>8;
}
}
}
image=mat_convert->opencv_convert(rgbbuf);
resize(image,show,Size(0,0),200,130);
fb->show_rgbbuffer(show.data,0,0,show.cols,show.rows);
}
close(fd);
}
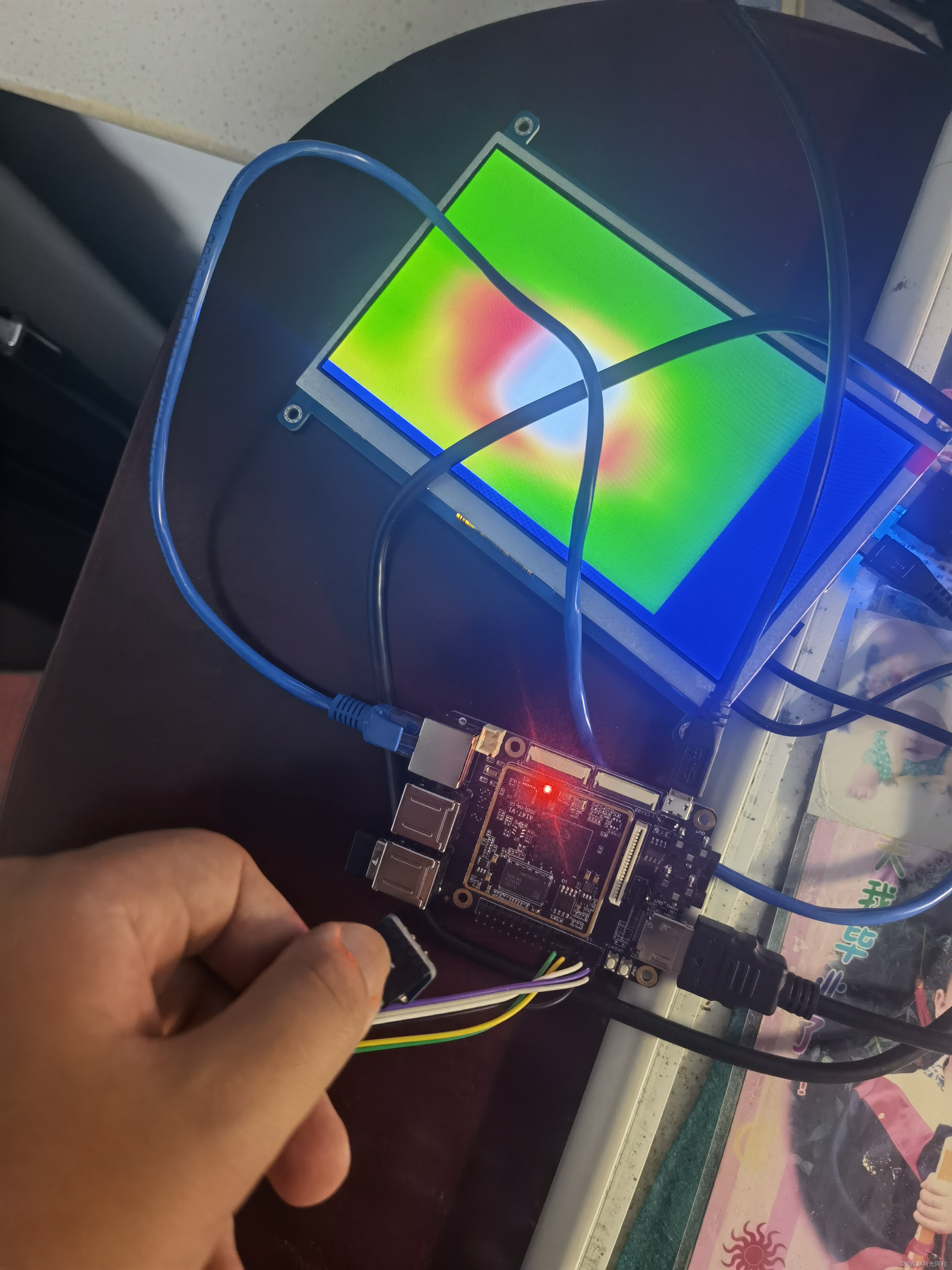
这里我偷懒了没有自己写插值算法,而是直接使用的OpenCV的插值函数,所以如果要用,还需要移植OpenCV。
具体代码参考
git@github.com:Yueyang123/arm_media.git
最终效果
今天是除夕夜,大家过年好。















 564
564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











