







NB-IoT(7)---开发环境搭建及模组驱动开发
STM32CubeMX安装及使用
1、STM32CubeMX介绍
2、STM32CubeMX安装
3、STM32CubeMX使用
STM32CubeMX介绍
STM32CubeMX简介:
微控制器图形化配置
– 自动处理引脚冲突
– 动态设置确定的时钟树
– 可以动态确定参数设置的外围和中间件模式和初始化
– 功耗预测
C代码工程生成器覆盖了STM32微控制器初始化编译软件,如IAR,KEIL,GCC可以独立使用,作为Eclipse插件使用
HAL库与STD库:
STD库-标准外设库
– 寄存器操作,将一些基本的寄存器操作封装成函数
HAL库-硬件抽象库
– 将这些抽象成了一个抽象层,从使用的角度来看,是与硬件无关的
HAL库优势
– HAL库是ST未来主推的库,从2015开始ST新出的芯片已经没有STD库
– HAL库的处理机制比STD库好很多,HAL库支持STM32全线产品
– HAL库跨芯片的可移植性非常好
STM32CubeMX安装
STM32CubeMX安装:
安装JAVA运行环境,JavaSetup8u151.exe
安装SetupSTM32CubeMX-4.22.0.exe,最好不要有中文路径
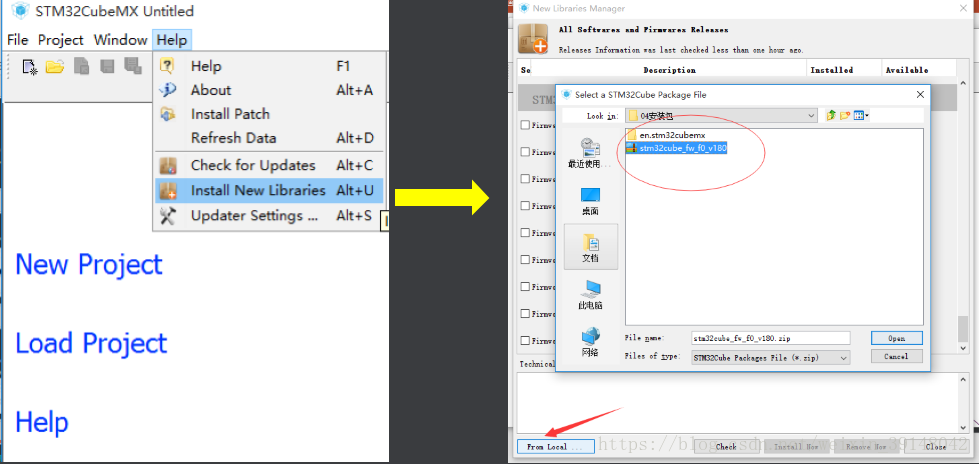
加载 “stm32cube_fw_f0_v180.zip”HAL库到STM32CubeMX中

STM32CubeMX加载固件库:
Keil安装及使用
1、Keil介绍
2、Keil安装
3、Keil使用

Keil介绍
行业领先的ARM C/C++编译工具链
μVision5 IDE集成开发环境,调试器和仿真环境
符合CMSIS (Cortex微控制器软件接口标准)
MDK-ARM软件为基于Cortex-M、Cortex-R4、ARM7、ARM9处理器设备提供了一个完整的开发环境。 MDK-ARM专为微控制器应用而设计,不仅易学易用,而且功能强大,能够满足大多数苛刻的嵌入式应用。
Keil安装
安装“MDK-523.exe”嵌入式开发环境
双击软件图标打开软件安装界面:

一直点击Next,License选项框打钩
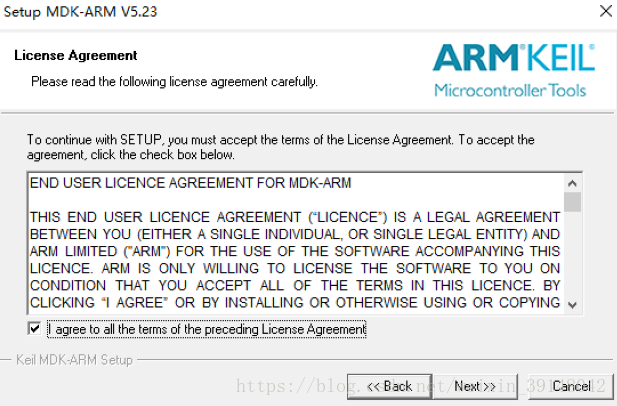
输入用户、城市、电子邮件信息
选择安装目录为默认即可
点击Next,开始安装,安装完成后,桌面显示

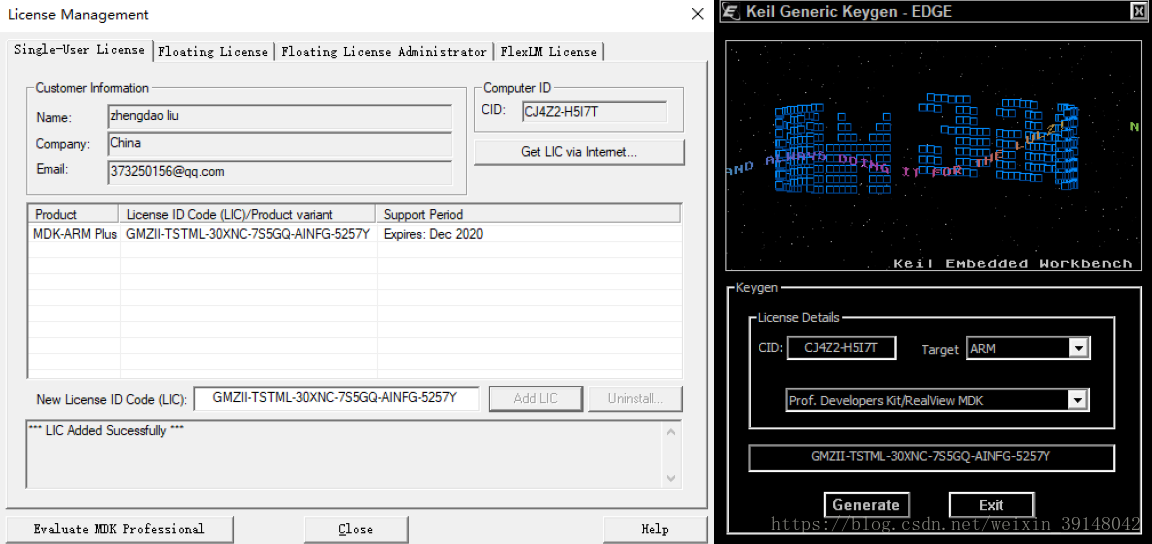
Keil破解:
以管理员身份运行Keil5,在File菜单下,选择License Management,复制CID
以管理员身份运行KEIL_Lic.exe,粘贴CID,选择Target为ARM,点击Generate成注册码
注册码复制到New License ID Code下,点击Add LIC,完成破解
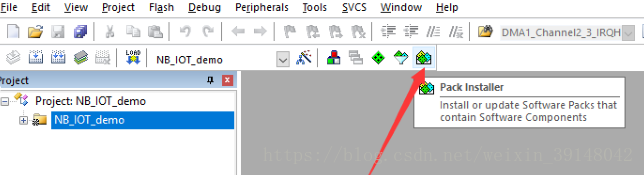
设备包安装:
选择Pack Installer 安装设备支持包
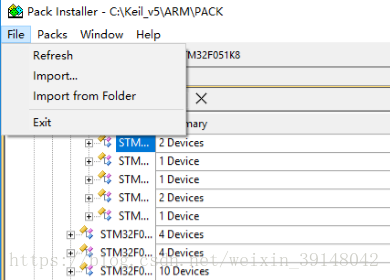
选择File菜单,点击Import
导入Keil.STM32F0xx_DFP.1.4.0
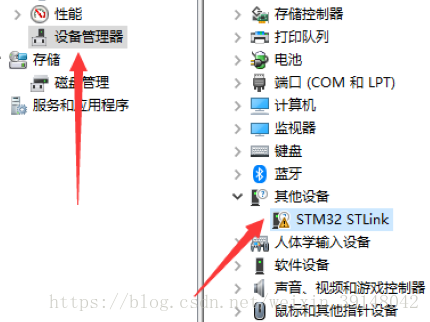
STLink驱动安装:
右击此电脑,选择管理
选择设备管理器,发现其他设备STM32 STLink
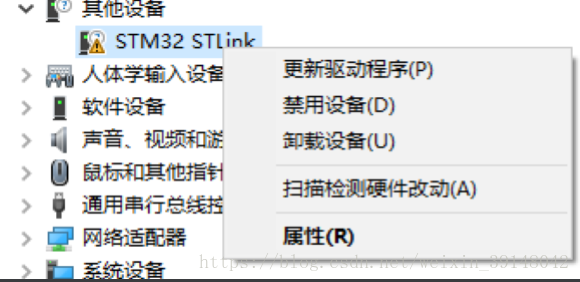
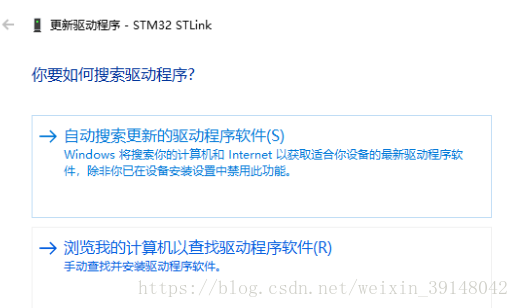
右击STM32 STLink,选择更新驱动程序
选择浏览我的计算机…….
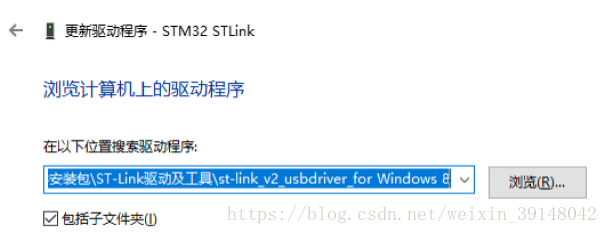
点击浏览选择驱动目录,win10系统选择Window8
完成驱动安装
NB-IoT基础工程建立
1、原理图分析
2、IO口、时钟及外设配置
3、LCD驱动移植
4、Printf函数重定向
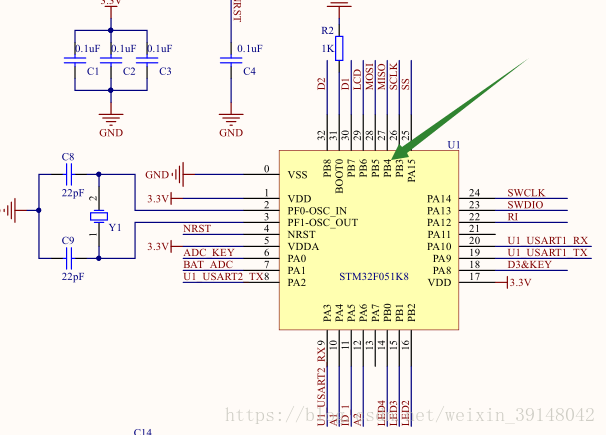
原理图分析
分析NB-IoT核心板原理
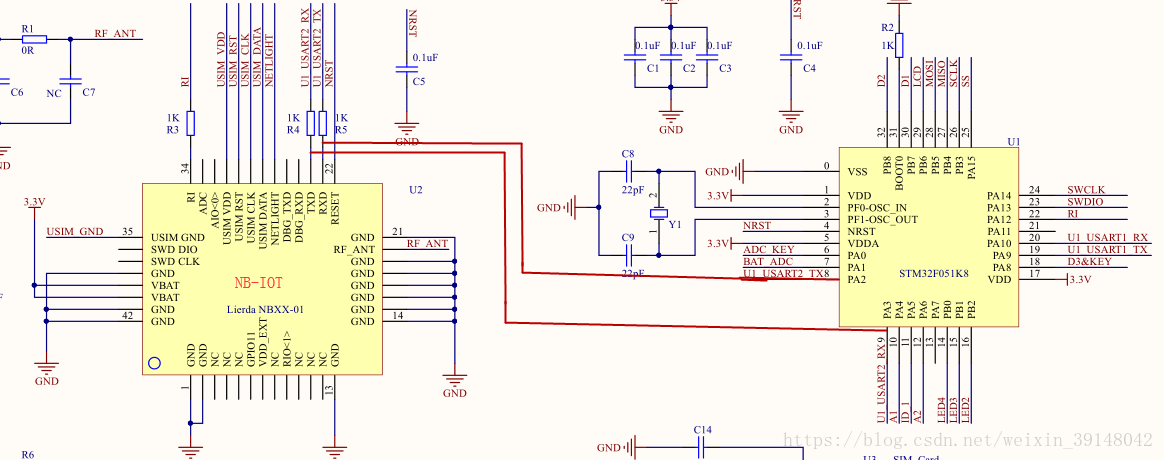
分析一键还原底板原理
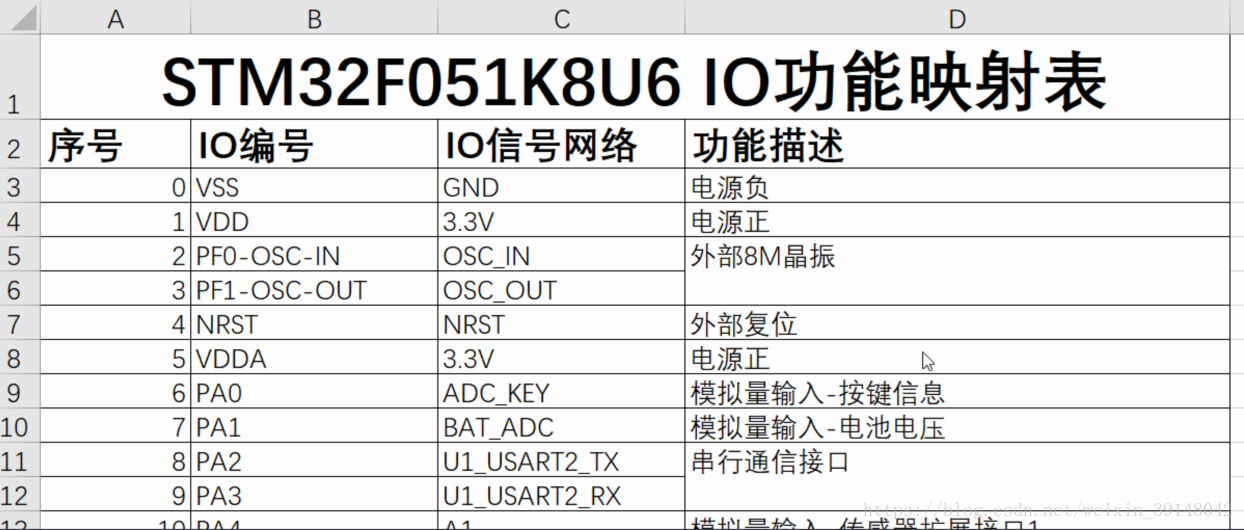
建立IO功能映射表
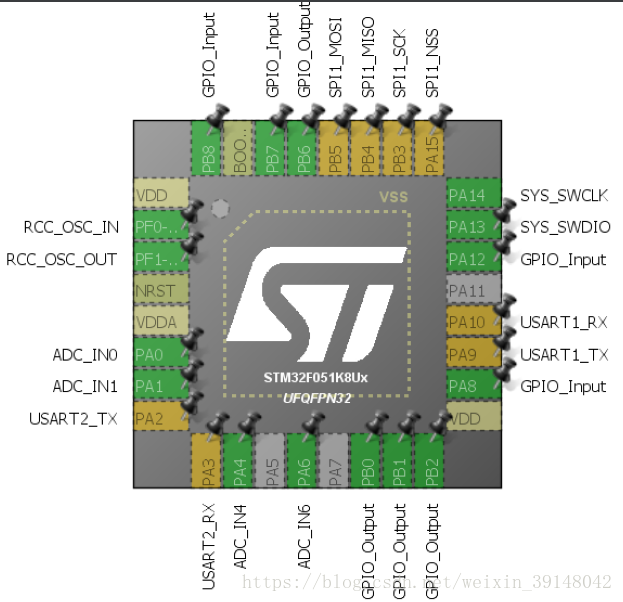
IO口、时钟及外设配置
IO口配置:
选择IO标签,根据IO功能映射表配置为相对应的功能
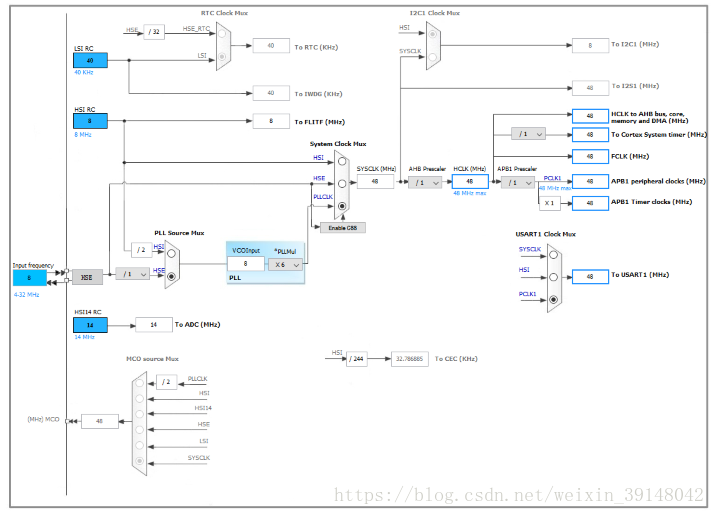
时钟配置:
选择时钟源为HSE(外部高频时钟)
配置倍频系数为6
使能锁相环配置系统主时钟为48M
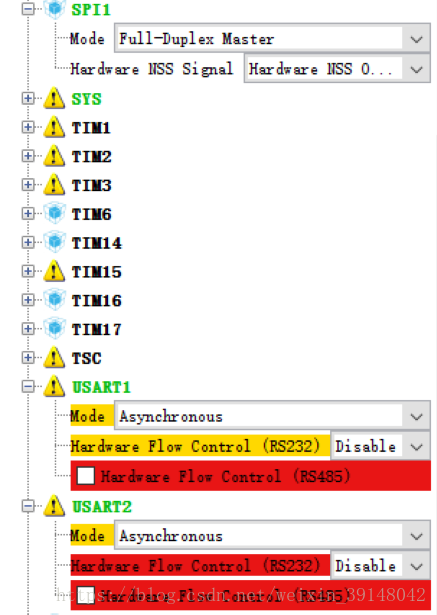
外设树配置:
SPI选择全双工主机模式
USART1选择异步收发模式
USART2选择异步收发模式
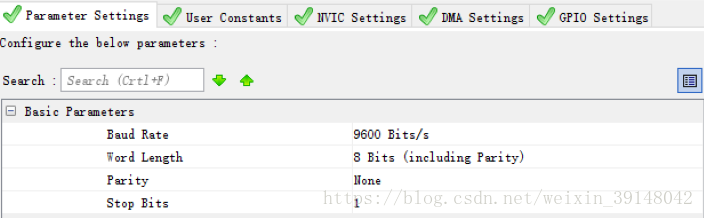
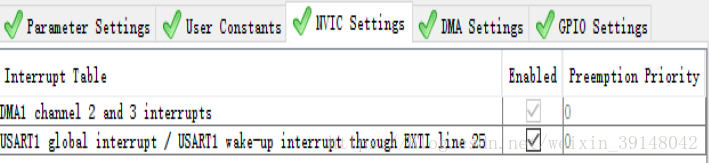
USART配置:
USART1& USART2设置波特率为9600、开启全局中断
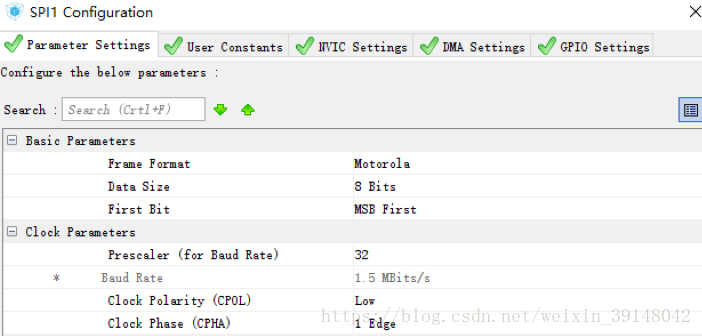
SPI配置:
设置数据位为8位
设置波特率为1.5MBit/s
时钟极性为低电平驱动
时钟相位为第一个边沿
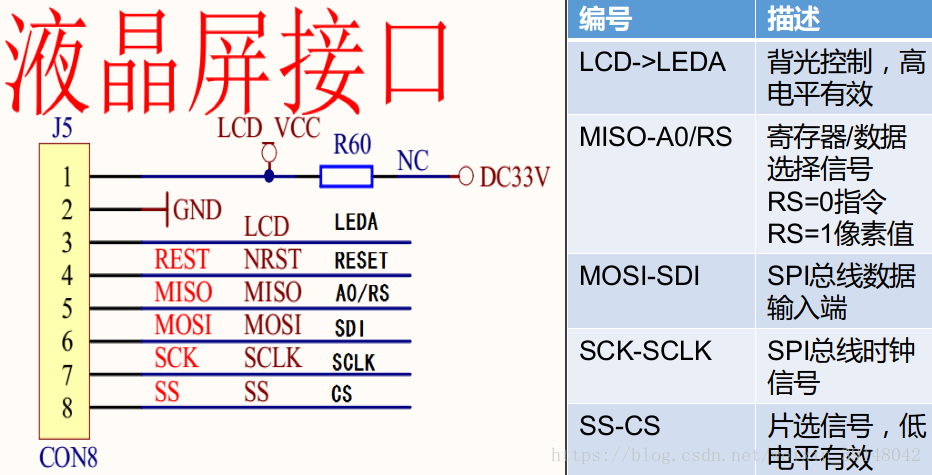
LCD驱动移植
LCD主要用于人机交互,动态显示设备信息
相关LCD的驱动开发已在LoRa中讲解,现只做移植
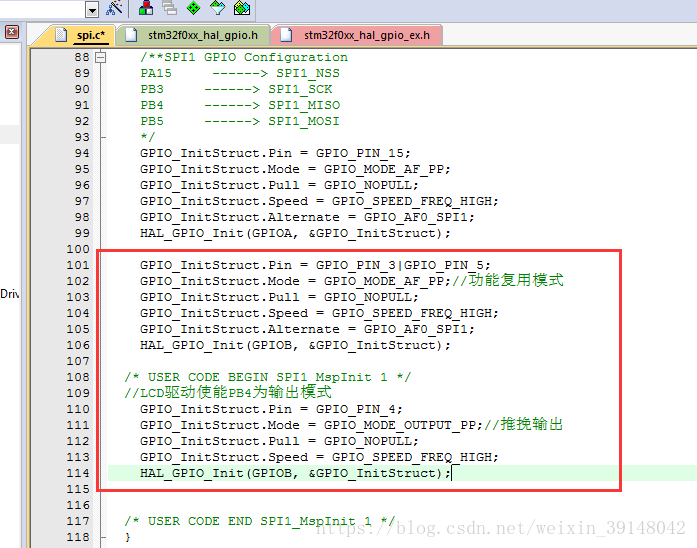
将下图所示文件添加到工程中,修改SPI初始化代码即可(LCD的 MISO用于数据和指令切换)

将PB4的复用功能模式更改为推挽输出模式
-
GPIO_InitStruct.Pin = GPIO_PIN_3|GPIO_PIN_5; -
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;//功能复用模式 -
GPIO_InitStruct.Pull = GPIO_NOPULL; -
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; -
GPIO_InitStruct.Alternate = GPIO_AF0_SPI1; -
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); -
/* USER CODE BEGIN SPI1_MspInit 1 */ -
//LCD驱动使能PB4为输出模式 -
GPIO_InitStruct.Pin = GPIO_PIN_4; -
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出模式 -
GPIO_InitStruct.Pull = GPIO_NOPULL; -
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; -
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
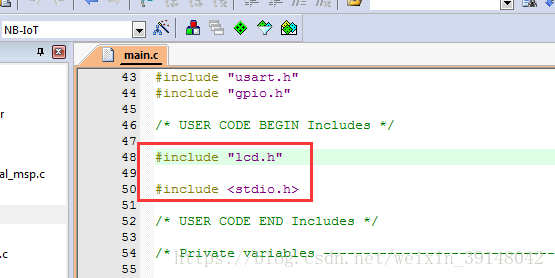
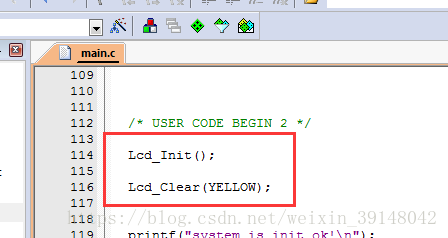
添加头文件和LCD初始化函数
-
#include "lcd.h" -
#include <stdio.h>
-
Lcd_Init(); -
Lcd_Clear(YELLOW);
Printf函数重定向
-
#include <stdio.h> -
int fputc(int ch, FILE *f) -
{ -
while((USART1->ISR & 0X40)==0); -
USART1->TDR = (uint8_t)ch; -
return ch; -
}
AT指令集开发原理
1、什么是AT指令集
2、NB-IoT关键AT指令介绍
3、串口透传开发
4、AT指令测试
什么是AT指令集
串口模块:
AT指令集:
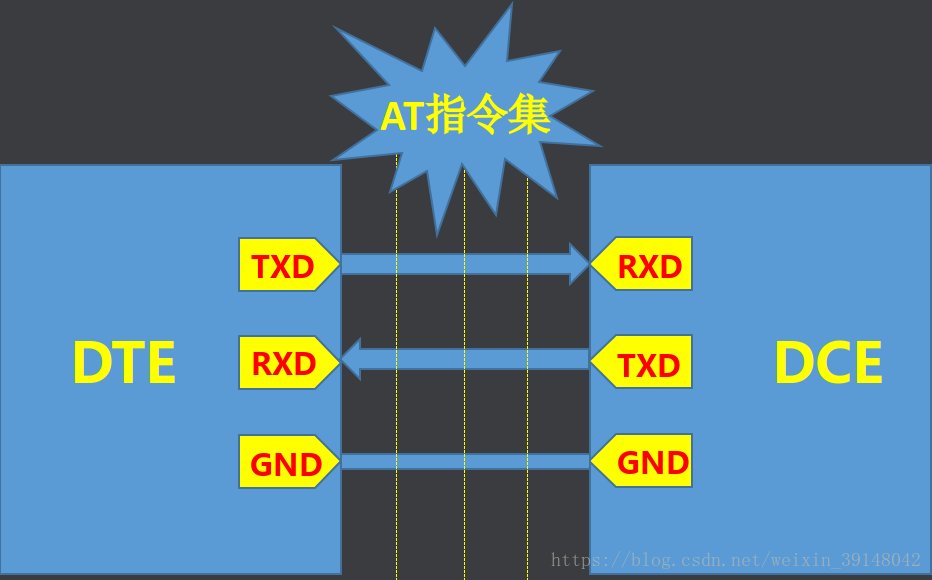
在90年代,诺基亚、爱立信、摩托罗拉和HP共同为GSM研制了一整套AT指令
-->GSM模块与计算机之间的通信协议是一些AT指令集
-->AT指令是以AT为首,字符结束的字符串,AT指令的响应数据包也是一个字符串
AT指令格式:
DTE:AT< CR>< LF>(发送:AT+回车+换行)
DCE:< LF> OK < LF>(返回:换行+OK+换行)
DTE:ATTEST< CR>< LF>(发送:ATTEST+回车+换行)
DCE:< CR> ERROR < LF>(返回:回车+ERROR+换行)
如果AT指令执行成功,“OK”字符串返回;
如果AT 指令语法错误或AT 指令执行失败,“ERROR”字符串返回。
NB-IoT关键AT指令介绍
NB-IoT初始化AT指令:
AT+CFUN=0关闭射频功能(不进行无线通讯)
AT+CFUN=1开启射频功能
AT+NBAND?查询(读取)模组配置频段
AT+NBAND=5配置模组为电信频段
AT+CGSN=1 查询IMEI号(一般出厂已经设置好)
AT+CGSN=1,201612091450303 设置IMEI号
AT+NCDP=XX.XX.XX.XX 设置 IoT 平台 IP 地址(非 COAP 协议可以不配置)
AT+NRB 软重启
AT+CIMI 查询SIM卡信息
AT+CMEE=1 开启错误提示
AT+CGDCONT=1,”IP”,”ctnet”设置APN
AT+CSQ 获取信号质量
NB-IoT连接网络AT指令:
AT+CSCON=1 设置基站连接通知
AT+CEREG=2 设置连接核心网通知
AT+NNMI=1 开启下行数据通知
AT+CGATT=1 自动搜网
AT+NUESTATS 查询 UE 状态
AT+CGPADDR 查询核心网分配的 ip 地址
NB-IoT数据收发AT指令:
UDP数据收发
在发送数据前先建立 socket:AT+NSOCR=DGRAM,17,XXXX,1 XXXX 为 SOCKET 监听的端口号, 回复 OK 创建成功
AT+NSOST=0,192.158.5.1,1024,2,AB30 向 192.158.5.1:1024 发送两字节数据: 0xAB 0x30
+NSONMI:0,4 模组提示收到了四字节数据
AT+NSORF=0,256 读取接收到的数据, 最多读取 256 个
0, 192.158.5.1,1024,4,A1A2A3A4,0 收到 192.158.5.1:1024 返回的四字节数据 0xA1 0xA2 0xA3 0xA4
COAP数据收发
CoAP 数据发送无需事先建立 socket(模组内部处理) , 直接发送数据:
-->AT+NMGS=2,A1A2 发送 2 字节数据, 发送成功回复 OK, 否则 ERROR
读取 CoAP 数据:
-->+NNMI:2,A1A2 收到 2 字节 CoAP 数据
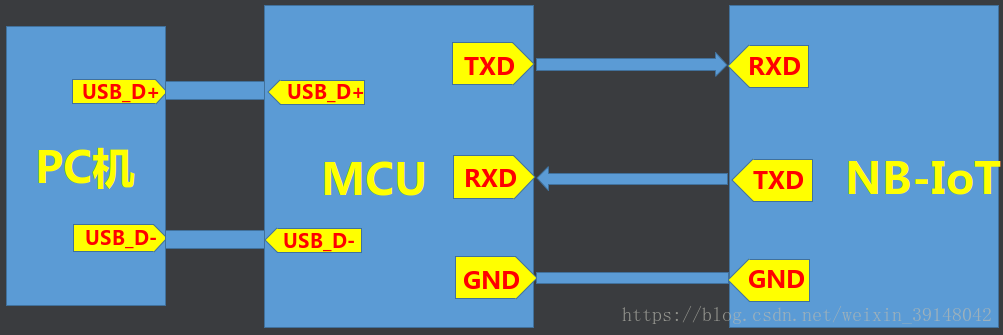
串口透传开发:
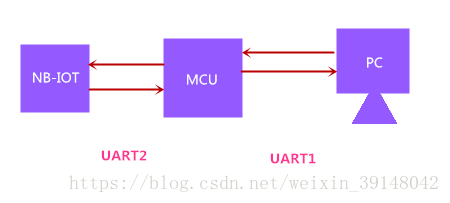
为了便于我们快速掌握AT指令原理:MCU充当透明传输,PC机直接与NB-IoT模组直接通讯(通过串口中断实时收发数据)
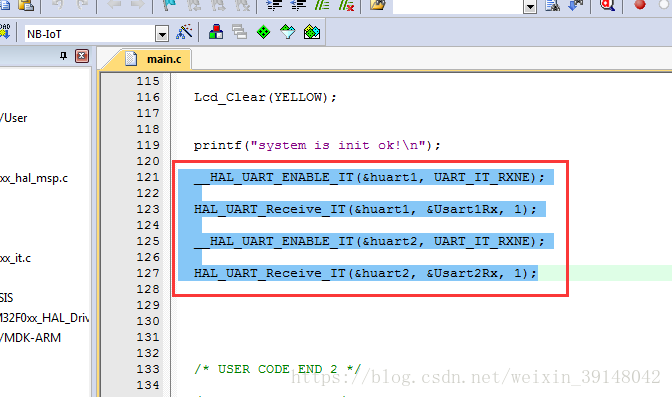
串口接收中断使能:
-
uint8_t Usart1Rx = 0; -
uint8_t Usart2Rx = 0; -
__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);//打开UART1接收中断(接收寄存器不为空则产生中断) -
HAL_UART_Receive_IT(&huart1, &Usart1Rx, 1);//UART1接收使能,Usart1Rx:接收数据的缓存区 -
__HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE);//打开UART2接收中断(接收寄存器不为空则产生中断) -
HAL_UART_Receive_IT(&huart2, &Usart2Rx, 1);//UART2接收使能,Usart2Rx:接收数据的缓存区
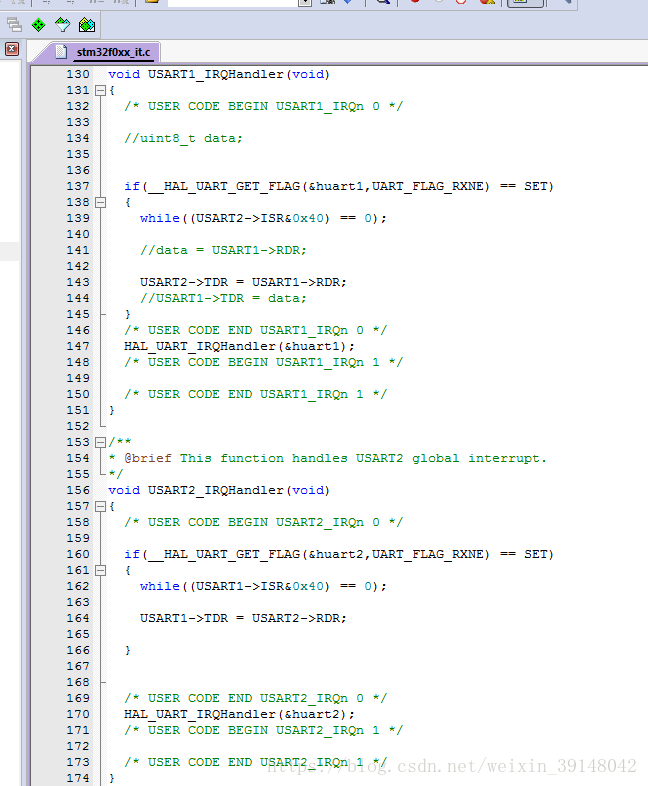
重写串口中断函数:
-
void USART1_IRQHandler(void) -
{ -
//uint8_t data; -
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_RXNE) == SET)//判断是否为串口接收中断(是否产生UART_FLAG_RXNE标志) -
{ -
while((USART2->ISR&0x40) == 0);//判断UART2是否发送完成 -
//data = USART1->RDR; -
USART2->TDR = USART1->RDR;//将UART1接收的数据赋值给UART2的发送寄存器,由UART2将数据自动发送给NB-IOT -
//USART1->TDR = data; -
} -
HAL_UART_IRQHandler(&huart1); -
} -
void USART2_IRQHandler(void) -
{ -
if(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_RXNE) == SET) -
{ -
while((USART1->ISR&0x40) == 0); -
USART1->TDR = USART2->RDR;//将UART2接收的数据赋值给UART1的发送寄存器,由UART1将数据自动发送给PC -
} -
HAL_UART_IRQHandler(&huart2); -
}
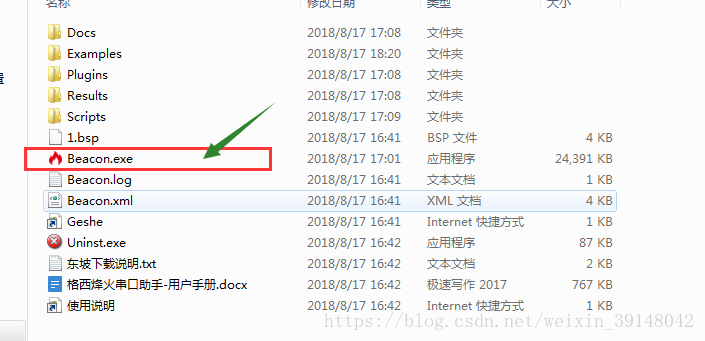
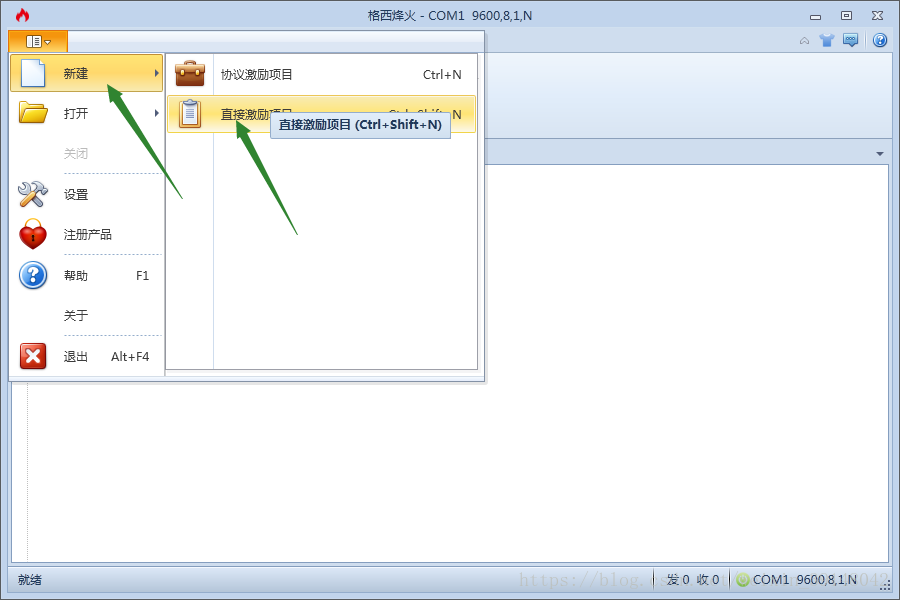
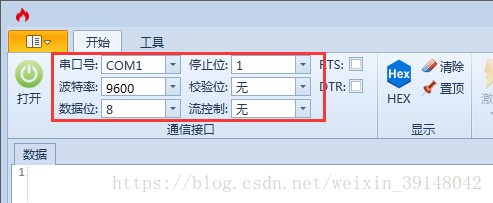
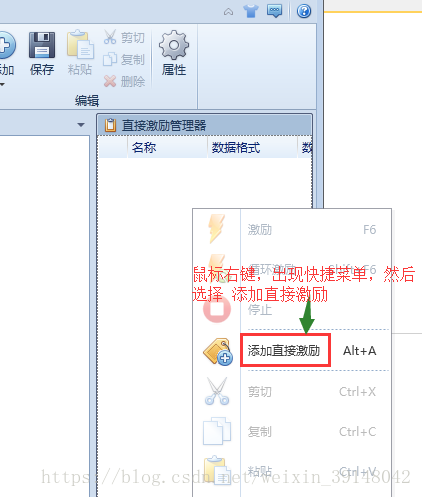
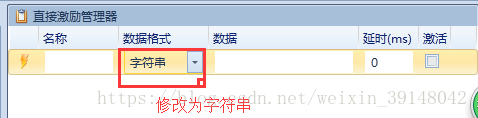
AT指令测试:
操作步骤:
















 8258
8258











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









