







个人认为的SVO 的初始化主要是指 <svo/frame_handler_mono.cpp>中的processFirstFrame()和 processSecondFrame()函数。
这两个函数主要完成了对于前两个关键帧的处理,得到前两个关键帧的单应矩阵H,并从中计算出前两帧的R和t,并对计算出来的t进行一个尺度变换,并建立初始地图。其主要是实现是在<svo/initialization.cpp>
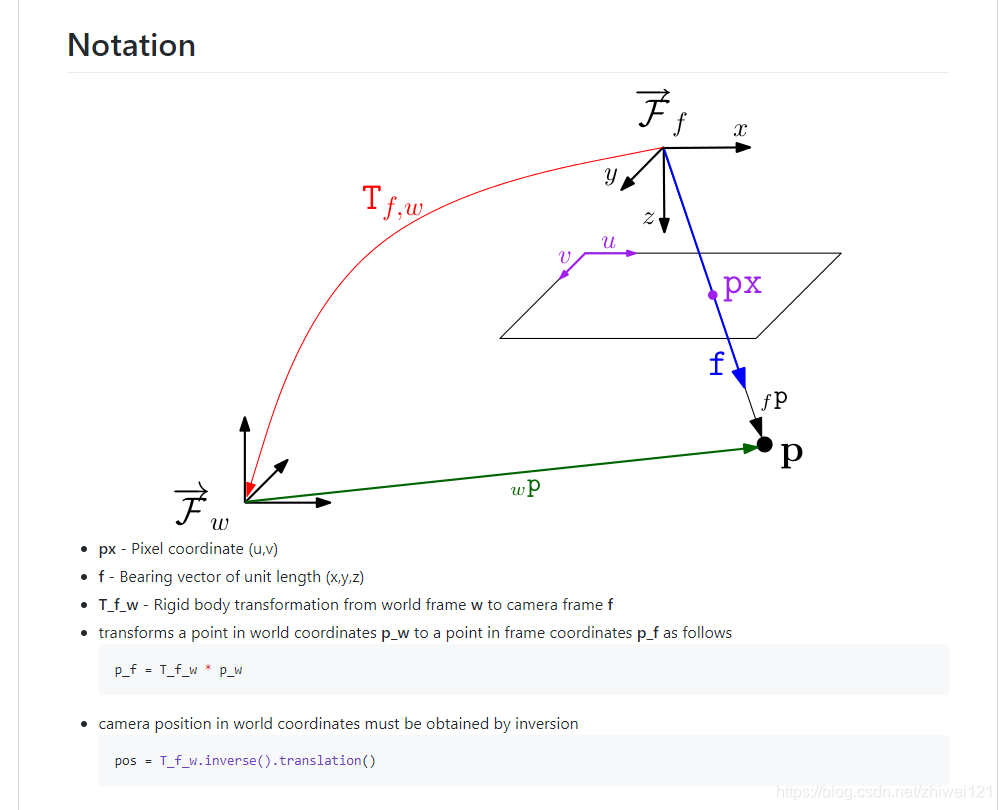
首先先放一张SVO 的示意图,一些基本符号的解释以及相机位姿的获取
一、处理第一帧 FrameHandlerMono::processFirstFrame()函数
//processFirstFrame()函数 作用是处理第1帧( 如果关键点数量>100 )就将其设置为关键帧;
FrameHandlerMono::UpdateResult FrameHandlerMono::processFirstFrame()
{
// 把第一帧的位姿设置为起点,也是世界坐标系的原点
new_frame_->T_f_w_ = SE3(Matrix3d::Identity(), Vector3d::Zero()); // 新建一个变换矩阵SE3然后赋给new_frame_的T_f_w_(用于表示从世界坐标到相机坐标的变换矩阵)
//然后判断函数klt_homography_init_.addFirstFrame(new_frame_)返回值是否为initialization::FAILURE,如果是,则结束processFirstFrame并返回RESULT_NO_KEYFRAME(意思是当前帧非关键帧)。
//其中klt_homography_init_是KltHomographyInit(FrameHandlerMono的友元类)类型的类,用于计算单应性矩阵(根据前两个关键帧)来初始化位姿。
//其中addFirstFrame(new_frame_)(定义在initialization.cpp中)
if(klt_homography_init_.addFirstFrame(new_frame_) == initialization::FAILURE)
return RESULT_NO_KEYFRAME;
//如果上一步未执行return,说明当前帧是关键帧,执行函数new_frame_->setKeyframe()将其设置为关键帧(即将is_keyframe_设置为true,并执行setKeyPoints())
// ***************记录一个问题,第一帧的fts_是在什么时候被赋值的????????****************
// 这个第一帧的fts_,应该是在processSecondFrame的addSecondFrame里赋值的
new_frame_->setKeyframe();
map_.addKeyframe(new_frame_);
stage_ = STAGE_SECOND_FRAME;
SVO_INFO_STREAM("Init: Selected first frame.");
return RESULT_IS_KEYFRAME;
}
其中,
initialization::KltHomographyInit klt_homography_init_; //!< Used to estimate pose of the first two keyframes by estimating a homography.`
klt_homography_init_.addFirstFrame(new_frame_)函数定义在initialization.cpp中。
enum InitResult {
FAILURE, NO_KEYFRAME, SUCCESS };
InitResult KltHomographyInit::addFirstFrame(FramePtr frame_ref)
{
// 先执行reset()函数(定义在同文件中):清空px_cur_(一个二维点向量,存储当前帧中被用于跟踪的关键点坐标)和重置 frame_ref_(一个frame型智能指针)。
reset();
// 执行detectFeatures函数,对new_frame进行Fast特征检测(调用FastDetector::detect函数),(???检测到的特征点在new_frame_ 的 fts_ 中????)。
// 并将其关键点坐标集和对应的向量集(关键特征点对应的世界坐标系下的归一化向量)分别赋给px_ref_和f_ref_。
detectFeatures(frame_ref, px_ref_, f_ref_);
// 判断特征数是否小于100,如果是,就结束addFirstFrame并返回FAILURE。
if(px_ref_.size() < 100)
{
SVO_WARN_STREAM_THROTTLE(2.0, "First image has less than 100 features. Retry in more textured environment.");
return FAILURE;
}
// 若上一步没执行return,则继续执行程序,将传入的new_frame_赋值给frame_ref_,将px_ref_的值赋给px_cur_,并结束addFirstFrame返回SUCCESS。
frame_ref_ = frame_ref;
px_cur_.insert(px_cur_.begin(), px_ref_.begin(), px_ref_.end()); //vector的insert函数,有三个参数,意义是:要插入的位置,要插入的另一个vector的开始值和结束值
return SUCCESS;
}
在processFirstFrame()函数处理完之后,系统把特征点超过100个的图像作为第一个关键帧,并把得到的特征点存在px_ref中。
二、处理第二帧 FrameHandlerMono::processSecondFrame()函数
FrameHandlerBase::UpdateResult FrameHandlerMono::processSecondFrame()
{
//调用klt_homography_init_子函数-addSecondFrame(new_frame_)同样定义在initialization.cpp中,
//不过这次调用的是addSecondFrame(new_frame_)
initialization::InitResult res = klt_homography_init_.addSecondFrame(new_frame_);
if(res == initialization::FAILURE)
return RESULT_FAILURE;
else if(res == initialization::NO_KEYFRAME)
return RESULT_NO_KEYFRAME;
// two-frame bundle adjustment
// 条件编译,如果定义了USE_BUNDLE_ADJUSTMENT,就进行BA优化,通过调用ba::twoViewBA函数,这里就不展开了。
#ifdef USE_BUNDLE_ADJUSTMENT
ba::twoViewBA(new_frame_.get(), map_.lastKeyframe().get(), Config::lobaThresh(), &map_);
#endif
// 执行函数new_frame_->setKeyframe()将其设置为关键帧(即将is_keyframe_设置为true,并执行setKeyPoints())。
// setKeyPoints函数中通过调用checkKeyPoints函数对当前图像中每个特征点进行遍历和比较,最终选出最具有代表性的5个作为关键点。
// 实质上是1个靠近图像中心的点和4个靠近图像四个角的点。
new_frame_->setKeyframe();
//通过函数getSceneDepth获取场景平均深度(depth_mean)最小深度(depth_min)。
double depth_mean, depth_min;
frame_utils::getSceneDepth(*new_frame_, depth_mean, depth_min);
// 向深度滤波器depth_filter中添加关键帧(当前帧),传入参数depth_mean、0.5 * depth_min(不知道为啥除以2)进行初始化。
depth_filter_->addKeyframe(new_frame_, depth_mean, 0.5*depth_min);
// add frame to map
// 向map_中添加关键帧
map_.addKeyframe(new_frame_);
stage_ = STAGE_DEFAULT_FRAME;
//调用klt_homography_init_.reset(),初始化px_cur_和frame_ref_。
klt_homography_init_.reset();
SVO_INFO_STREAM("Init: Selected second frame, triangulated initial map.");
return RESULT_IS_KEYFRAME;
}
首先调用的是klt_homography_init_.addSecondFrame(new_frame_)函数。
// addSecondFrame()函数
// 调用trackKlt对px_ref进行跟踪。跟踪数量小于一定值,返回FAILURE; disparity的均值小于一定值,说明两帧太近,返回NO_KEYFRAME。
// 调用computeHomography。如果inliers数量小于一定值,返回FAULURE。 以上筛选条件都通过后,用xyz_in_cur来计算在当前帧中的点的平均深度,用于求尺度因子,然后算出当前帧的位姿。
// 对每一个inliers,计算它在世界坐标系下的3D点坐标,并将对应的feature加入到ref_frame和cur_frame中,同时将feature加入point->obs_中, 返回SUCCESS。
InitResult KltHomographyInit::addSecondFrame(FramePtr frame_cur)
{
//首先调用trackKlt函数跟踪特征(LK光流法)
trackKlt(frame_ref_, frame_cur, px_ref_, px_cur_, f_ref_, f_cur_, disparities_);
SVO_INFO_STREAM("Init: KLT tracked "<< disparities_ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 606
606











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









