







题目来源
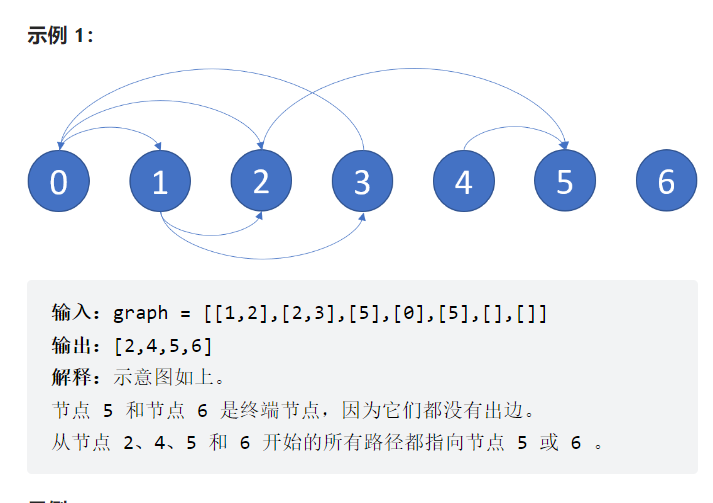
题目描述

class Solution {
public:
vector<int> eventualSafeNodes(vector<vector<int>>& graph) {
}
};
题目解析
深度优先遍历 (官方答案)
根据题意,如果起始节点位于一个环内,或者能够到达一个环,则该节点不是安全的。否则,该节点就是安全的。
我们可以使用DFS来找环,并在深度优先搜索的时候,用三色对节点进行标记,标记的规则如下:
- 白色(用0表示):该节点尚未被访问
- 灰色(用1表示):该节点位于递归栈中,或者在某个环上
- 黑色(用2表示):该节点搜索完毕,是一个安全节点
当我们首次访问一个节点时,将其标记为灰色,并继续搜索与其相连的节点。
如果在搜索过程中遇到了一个灰色节点,则说明找到了一个环,此时退出搜索,栈中的节点扔保持为灰色,这一做法可以将[找到了环]这一信息传递到栈中所有节点上
如果搜索过程中没有遇到灰色节点,则说明没有遇到环,那么递归返回前,我们将其标记由灰色改为黑色,即表示它是一个安全的节点。
class Solution {
bool safe(vector<vector<int>>& graph, std::vector<int> &color, int x){
if(color[x] > 0){ //该节点已经被访问过了
return color[x] == 2; // 判断该节点是否安全
}
color[x] = 1; // 正在访问中
for(int y : graph[x]){
if(!safe(graph, color, y)){ // 只要有一个未被访问到
return false;
}
}
color[x] = 2;
return true;
}
public:
vector<int> eventualSafeNodes(vector<vector<int>>& graph) {
int n = graph.size();
std::vector<int> color(n);
vector<int> ans;
for (int i = 0; i < n; ++i) {
if (safe(graph, color, i)) {
ans.push_back(i);
}
}
return ans;
}
};
方向图 + 拓扑排序
分析:
- 根据题意,对于某一个节点,如果它当前在某个环内,或者有可能走到某个环上,那么它就是不安全的,因为如果遇到环,就无法在有限步内到达终点。
- 根据上面的分析,我们发现,最简单的安全点就是无路可走的终点(也即出度为 00 的节点)。而拓展到一般情况,如果一个节点所指向的点均为安全点,那么这个点也是安全点。如何提取出这些安全点呢?我们需要避开图中的环路,提到环路,我们会自然地想到拓扑排序
- 拓扑排序是找到图中入度为 0的节点,以及仅由入度为 0 节点所指向的节点。 ,而本题是找到图中**出度为 0 的节点,以及仅指向出度为 0 节点的节点。**刚好是相反的情况,所以,我们将题目给定的有向图变为反图(也即有向边的起点、终点互换),那么所有安全点便可以通过拓扑排序来求解了
思路:
- 从终点逆向推导,将指向终点的边都删除,删除后如果指向它的节点没有出边了,那么这个节点也可以作为终点继续寻找
- 这个节点其实就是逆向拓扑排序,将没有出边的节点入队,删除指向当前节点的所有边,将没有出边的节点入队
- 为结果需要严格递增排序,所以拓扑排序结束之后再统计 入度 为 0 的节点。
class Solution {
public:
vector<int> eventualSafeNodes(vector<vector<int>>& graph) {
int n = graph.size();
std::vector<int> degree(n);
std::map<int, std::set<int>> map;
// 从终端开始推导: 终点---> 起点
for (int begin = 0; begin < graph.size(); ++begin) {
degree[begin] = graph[begin].size(); // out
for(auto end : graph[begin]){
map[end].insert(begin);
}
}
std::queue<int> queue;
for (int i = 0; i < degree.size(); ++i) {
if(degree[i] == 0){
queue.push(i); // out = 0
}
}
std::set<int> set;
while (!queue.empty()){
auto top = queue.front(); queue.pop();
set.insert(top);
for(auto next : map[top]){
degree[next]--;
if(degree[next] == 0){
queue.push(next);
}
}
}
return {set.begin(), set.end()};
}
};
深度优先遍历(我的答案)
class Solution {
/*
第1步:找出所有的终端节点: out == 0
第2步:以每一个节点(g.nodes)为起点,进行BFS,判断是不是安全节点:
安全节点: 所有可能的路径都可以到达终端节点
DSF时哪些节点可能不是安全节点呢?
- DFS发现了环,有两种情况:
- 自环
- 普通环
- 对于每一个节点的所有可能的下一条路径,只要有一条路径不是安全节点,那么就一定不是安全节点
*/
std::map<int, bool> status; // 是不是安全节点, 终端一定是安全节点
// 当前节点是不是安全节点
// i一定会有效
bool process(std::vector<std::vector<int>> &graph, int i, std::set<int> set){
// 当前节点已经判断过了
if(status.count(i)){
return status[i];
}
bool flag = true;
auto load = graph[i]; // 当前节点可能的路
for(auto l : load){
// 自环是不是终端节点呢? in = 1, out = 1,一定不是终端节点
if(l == i || set.count(l)){ // 自环路 || 形成了环
flag = false;
break;
}
set.insert(l);
if(!process(graph, l, set)){ // 只要有一条路不能到达终点
flag = false;
break;
}
set.erase(l);
}
return status[i] = flag;
}
public:
vector<int> eventualSafeNodes(vector<vector<int>>& graph) {
// 一定要先:找出所有的终端节点
for(int i = 0; i < graph.size(); i++){
if(graph[i].empty()){
status[i] = true; //g[i] -- > [....] , i.out = g[i].size(); 因此如果为空的话,那么一定是终端节点
}
}
// 然后枚举每一个作为起点,判断能不能全部到达终点
for(int i = 0; i < graph.size(); i++){
std::set<int> path{i};
process(graph, i, path);
}
// 获取最终的答案
std::vector<int> vec;
for(auto iter : status){
if(iter.second){
vec.push_back(iter.first);
}
}
return vec;
}
};














 133
133











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









