







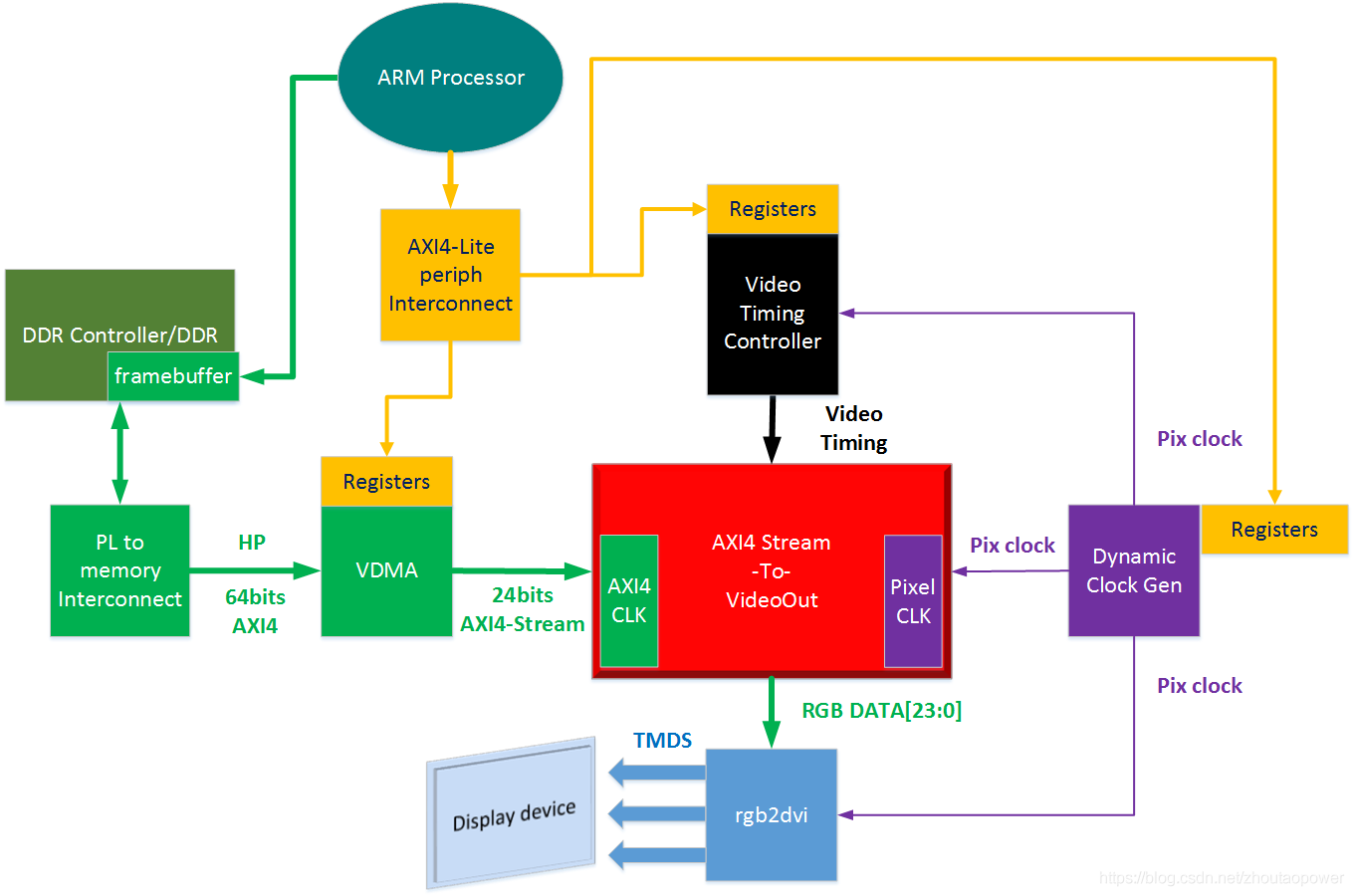
在《Zynq-PS-SDK(12) 之 VDMA+VTC+AXI4S-VideoOut 视频通路硬件搭建》我们已经生成了 bitStream,硬件环境已经准备 OK,接下来进行软件的配置;
软件的配置主要针对的对象是下面的黄色部分,也就是 AXI4-lite 总线接入的寄存器配置,涉及到如下:
1、Dynamic Clock Generator;
2、VTC;
3、VDMA;
这里新增一个函数,叫做 Steph_VideoEngineInit,用于配置 video 相关的寄存器:
/********************************* Video Engine Initialize *********************************/
int Steph_VideoEngineInit(void)
{
int Status = XST_SUCCESS;
XAxiVdma_Config *vdmaConfig;
Steph_FrameBufferInit();
/*
* Initialize VDMA driver
*/
vdmaConfig = XAxiVdma_LookupConfig(VGA_VDMA_ID);
if (!vdmaConfig)
{
xil_printf("No video DMA found for ID %d\r\n", VGA_VDMA_ID);
}
Status = XAxiVdma_CfgInitialize(&vdma, vdmaConfig, vdmaConfig->BaseAddress);
if (Status != XST_SUCCESS)
{
xil_printf("VDMA Configuration Initialization failed %d\r\n", Status);
}
/*
* Initialize the Display controller and start it
*/
Status = DisplayInitialize(&dispCtrl, &vdma, DISP_VTC_ID, DYNCLK_BASEADDR, pFrames, DEMO_STRIDE);
if (Status != XST_SUCCESS)
{
xil_printf("Display Ctrl initialization failed during demo initialization%d\r\n", Status);
}
Status = DisplayStart(&dispCtrl);
if (Status != XST_SUCCESS)
{
xil_printf("Couldn't start display during demo initialization%d\r\n", Status);
}
DemoPrintTest(dispCtrl.framePtr[dispCtrl.curFrame], dispCtrl.vMode.width, dispCtrl.vMode.height, dispCtrl.stride, DEMO_PATTERN_0);
return Status;
}这里,缓存配置成为了 1 帧,用于显示图片:
#define BYTES_PIXEL 3
#define DEMO_MAX_FRAME (1920*1080*BYTES_PIXEL)
#define DEMO_STRIDE (1920 * BYTES_PIXEL)
/*
* Framebuffers for video data
*/
u8 frameBuf[DISPLAY_NUM_FRAMES][DEMO_MAX_FRAME] __attribute__ ((aligned(64)));
u8 *pFrames[DISPLAY_NUM_FRAMES]; //array of pointers to the frame buffers
/********************************* Framebuffer Initialize *********************************/
void Steph_FrameBufferInit(void)
{
int i = 0;
/*
* Initialize an array of pointers to the 3 frame buffers
*/
for (i = 0; i < DISPLAY_NUM_FRAMES; i++)
{
pFrames[i] = frameBuf[i];
}
}
在 DisplayInitialize 配置了动态时钟:
ClkFindParams(dispPtr->vMode.freq, &clkMode);
/*
* Store the obtained frequency to pxlFreq. It is possible that the PLL was not able to
* exactly generate the desired pixel clock, so this may differ from vMode.freq.
*/
dispPtr->pxlFreq = clkMode.freq;
/*
* Write to the PLL dynamic configuration registers to configure it with the calculated
* parameters.
*/
if (!ClkFindReg(&clkReg, &clkMode))
{
xdbg_printf(XDBG_DEBUG_GENERAL, "Error calculating CLK register values\n\r");
return XST_FAILURE;
}
ClkWriteReg(&clkReg, dispPtr->dynClkAddr);
/*
* Enable the dynamically generated clock
*/
ClkStart(dispPtr->dynClkAddr);配置的函数主要是通过传入的期望时钟频率 vMode.freq,通过调用 ClkFindParams 来计算并寻找合适的输出时钟频率:clkMode.freq,并配置到寄存器中;
接着配置 VTC,也就是时序,时序的话,需要根据具体的分辨率配置不同的时序。这里,由于我们是 Source 设备,所以配置成为 Generator 即可;
vtcConfig = XVtc_LookupConfig(vtcId);
/* Checking Config variable */
if (NULL == vtcConfig) {
return (XST_FAILURE);
}
Status = XVtc_CfgInitialize(&(dispPtr->vtc), vtcConfig, vtcConfig->BaseAddress);
/* Checking status */
if (Status != (XST_SUCCESS)) {
return (XST_FAILURE);
}
/*
* Configure the vtc core with the display mode timing parameters
*/
vtcTiming.HActiveVideo = dispPtr->vMode.width; /**< Horizontal Active Video Size */
vtcTiming.HFrontPorch = dispPtr->vMode.hps - dispPtr->vMode.width; /**< Horizontal Front Porch Size */
vtcTiming.HSyncWidth = dispPtr->vMode.hpe - dispPtr->vMode.hps; /**< Horizontal Sync Width */
vtcTiming.HBackPorch = dispPtr->vMode.hmax - dispPtr->vMode.hpe + 1; /**< Horizontal Back Porch Size */
vtcTiming.HSyncPolarity = dispPtr->vMode.hpol; /**< Horizontal Sync Polarity */
vtcTiming.VActiveVideo = dispPtr->vMode.height; /**< Vertical Active Video Size */
vtcTiming.V0FrontPorch = dispPtr->vMode.vps - dispPtr->vMode.height; /**< Vertical Front Porch Size */
vtcTiming.V0SyncWidth = dispPtr->vMode.vpe - dispPtr->vMode.vps; /**< Vertical Sync Width */
vtcTiming.V0BackPorch = dispPtr->vMode.vmax - dispPtr->vMode.vpe + 1;; /**< Horizontal Back Porch Size */
vtcTiming.V1FrontPorch = dispPtr->vMode.vps - dispPtr->vMode.height; /**< Vertical Front Porch Size */
vtcTiming.V1SyncWidth = dispPtr->vMode.vpe - dispPtr->vMode.vps; /**< Vertical Sync Width */
vtcTiming.V1BackPorch = dispPtr->vMode.vmax - dispPtr->vMode.vpe + 1;; /**< Horizontal Back Porch Size */
vtcTiming.VSyncPolarity = dispPtr->vMode.vpol; /**< Vertical Sync Polarity */
vtcTiming.Interlaced = 0; /**< Interlaced / Progressive video */
/* Setup the VTC Source Select config structure. */
/* 1=Generator registers are source */
/* 0=Detector registers are source */
memset((void *)&SourceSelect, 0, sizeof(SourceSelect));
SourceSelect.VBlankPolSrc = 1;
SourceSelect.VSyncPolSrc = 1;
SourceSelect.HBlankPolSrc = 1;
SourceSelect.HSyncPolSrc = 1;
SourceSelect.ActiveVideoPolSrc = 1;
SourceSelect.ActiveChromaPolSrc= 1;
SourceSelect.VChromaSrc = 1;
SourceSelect.VActiveSrc = 1;
SourceSelect.VBackPorchSrc = 1;
SourceSelect.VSyncSrc = 1;
SourceSelect.VFrontPorchSrc = 1;
SourceSelect.VTotalSrc = 1;
SourceSelect.HActiveSrc = 1;
SourceSelect.HBackPorchSrc = 1;
SourceSelect.HSyncSrc = 1;
SourceSelect.HFrontPorchSrc = 1;
SourceSelect.HTotalSrc = 1;
XVtc_SelfTest(&(dispPtr->vtc));
XVtc_RegUpdateEnable(&(dispPtr->vtc));
XVtc_SetGeneratorTiming(&(dispPtr->vtc), &vtcTiming);
XVtc_SetSource(&(dispPtr->vtc), &SourceSelect);
/*
* Enable VTC core, releasing backpressure on VDMA
*/
XVtc_EnableGenerator(&dispPtr->vtc);最后配置 VDMA 相关寄存器,这里有一些需要描述的东西,首先,需要告诉 VDMA 的 framebuffer 的起始地址在哪,所以要配置起始地址寄存器,同时还要配置图像的长宽,让 VDMA 知道从什么地方,搬运多长的数据;最后开启 VDMA,并停留在一帧:
XAxiVdma_Config *vdmaConfig;
/*
* Initialize VDMA driver
*/
vdmaConfig = XAxiVdma_LookupConfig(VGA_VDMA_ID);
if (!vdmaConfig)
{
xil_printf("No video DMA found for ID %d\r\n", VGA_VDMA_ID);
}
Status = XAxiVdma_CfgInitialize(&vdma, vdmaConfig, vdmaConfig->BaseAddress);
if (Status != XST_SUCCESS)
{
xil_printf("VDMA Configuration Initialization failed %d\r\n", Status);
}
/*
* Configure the VDMA to access a frame with the same dimensions as the
* current mode
*/
dispPtr->vdmaConfig.VertSizeInput = dispPtr->vMode.height;
dispPtr->vdmaConfig.HoriSizeInput = (dispPtr->vMode.width) * 3;
dispPtr->vdmaConfig.FixedFrameStoreAddr = dispPtr->curFrame;
/*
*Also reset the stride and address values, in case the user manually changed them
*/
dispPtr->vdmaConfig.Stride = dispPtr->stride;
for (i = 0; i < DISPLAY_NUM_FRAMES; i++)
{
dispPtr->vdmaConfig.FrameStoreStartAddr[i] = (u32) dispPtr->framePtr[i];
}
/*
* Perform the VDMA driver calls required to start a transfer. Note that no data is actually
* transferred until the disp_ctrl core signals the VDMA core by pulsing fsync.
*/
Status = XAxiVdma_DmaConfig(dispPtr->vdma, XAXIVDMA_READ, &(dispPtr->vdmaConfig));
if (Status != XST_SUCCESS)
{
xil_printf("Read channel config failed %d\r\n", Status);
return XST_FAILURE;
}
Status = XAxiVdma_DmaSetBufferAddr(dispPtr->vdma, XAXIVDMA_READ, dispPtr->vdmaConfig.FrameStoreStartAddr);
if (Status != XST_SUCCESS)
{
xil_printf("Read channel set buffer address failed %d\r\n", Status);
return XST_FAILURE;
}
Status = XAxiVdma_DmaStart(dispPtr->vdma, XAXIVDMA_READ);
if (Status != XST_SUCCESS)
{
xil_printf("Start read transfer failed %d\r\n", Status);
return XST_FAILURE;
}
Status = XAxiVdma_StartParking(dispPtr->vdma, dispPtr->curFrame, XAXIVDMA_READ);
if (Status != XST_SUCCESS)
{
xil_printf("Unable to park the channel %d\r\n", Status);
return XST_FAILURE;
}配置完成,这样的话,一旦开启 VDMA,那么数据的自动搬运就开始;
代码上传至 gitee:
可运行节点:
[Display] : Finished the Display to HDMI channel project
下面是 main 函数全部代码:
/******************************************************************************
*
* Copyright (C) 2010 - 2014 Xilinx, Inc. All rights reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* Use of the Software is limited solely to applications:
* (a) running on a Xilinx device, or
* (b) that interact with a Xilinx device through a bus or interconnect.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL
* XILINX BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF
* OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE.
*
* Except as contained in this notice, the name of the Xilinx shall not be used
* in advertising or otherwise to promote the sale, use or other dealings in
* this Software without prior written authorization from Xilinx.
*
******************************************************************************/
/*****************************************************************************/
/**
*
* @file hello_world.c
*
* This file contains a design example using the Cortex A9 Scu Private
* Timer and the driver (XScuTimer) using interrupts, and MIO LED.
*
* @note None.
*
* <pre>
*
* MODIFICATION HISTORY:
*
* Ver Who Date Changes
* ----- ---- -------- ---------------------------------------------
* 1.00a nm 03/10/10 First release
* </pre>
*
******************************************************************************/
/***************************** Include Files *********************************/
#include "xparameters.h"
#include "xscutimer.h"
#include "xscugic.h"
#include "xil_exception.h"
#include "xil_printf.h"
#include "xgpiops.h"
#include "steph_axi_pwm.h"
#include "sleep.h"
#include "xil_mmu.h"
#include "xaxivdma.h"
#include "xvtc.h"
#include "xil_cache.h"
#include "dynclk.h"
#include "xil_types.h"
#include "pic_800_600.h"
#include "display_ctrl.h"
#include "display_demo.h"
/************************** Constant Definitions *****************************/
/*
* The following constants map to the XPAR parameters created in the
* xparameters.h file. They are only defined here such that a user can easily
* change all the needed parameters in one place.
*/
#define TIMER_DEVICE_ID XPAR_XSCUTIMER_0_DEVICE_ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#define TIMER_IRPT_INTR XPAR_SCUTIMER_INTR
#define TIMER_LOAD_VALUE (XPAR_PS7_CORTEXA9_0_CPU_CLK_FREQ_HZ/2 - 1)
#define TIMEOUT_CNT (30)
#define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID
/**************************** Type Definitions *******************************/
/***************** Macros (Inline Functions) Definitions *********************/
#define RD_32BIT_REG(addr) (*(volatile uint32_t *)(addr))
#define WR_32BIT_REG(addr, value) (*(volatile uint32_t *)(addr)) = (value)
#define STEPH_MIO_0 0
#define STEPH_MIO_1 13
#define STEPH_EMIO_0 54
#define STEPH_EMIO_1 55
#define STEPH_EMIO_2 56
#define STEPH_EMIO_3 57
#define MIO_OUTPUT 1
#define MIO_INPUT 0
#define MIO_OUTPUT_EN 1
#define MIO_OUTPUT_DIS 0
/* Accroding to the system.hdf file axi_gpio_0 */
#define AXI_GPIO_0_BASE_ADDR 0x41200000
#define GPIO_DATA_OFFSET 0x00
#define GPIO_TRI_OFFSET 0x04
#define GPIO_2_DATA_OFFSET 0x08
#define GPIO_2_TRI_OFFSET 0x0C
#define GIER_OFFSET 0x11C
#define IP_ISR_OFFSET 0x120
#define IP_IER_OFFSET 0x128
/* PWM Configurations */
#define PWM_CYCLE 2000
#define PWM_DUTY_STEP 3
/* CPU1 Address */
#define WAKEUP_CPU1_ADDR 0xFFFFFFF0
#define CPU1_RUN_ADDR 0x20000000
#define SOFTWARE_IRQ_ID_TO_CPU0 1
#define SOFTWARE_IRQ_ID_TO_CPU1 2
#define CPU_0_ID 0x01
#define CPU_1_ID 0x02
#define sev() __asm__("sev")
#define DEMO_VIDEO_H 800
#define DEMO_VIDEO_V 600
#define DEMO_VIDEO_STRIDE (MAX_SUPPORT_H * BYTES_PIXEL)
/*
* XPAR redefines
*/
#define DYNCLK_BASEADDR XPAR_AXI_DYNCLK_0_BASEADDR
#define VGA_VDMA_ID XPAR_AXIVDMA_0_DEVICE_ID
#define DISP_VTC_ID XPAR_VTC_0_DEVICE_ID
#define FNC_CHECK_RETURN(Status) \
{ \
if (Status != XST_SUCCESS) \
return XST_FAILURE; \
}
#define FNC_CHECK_NULL_POINTER(PTR) \
{ \
if (NULL == IntcConfig) \
return XST_FAILURE; \
}
/************************** Function Prototypes ******************************/
static void TimerIRQHandler(void *CallBackRef);
static void SoftwareIRQHandler(void *CallBackRef);
/************************** Variable Definitions *****************************/
XScuTimer TimerInstance; /* Cortex A9 Scu Private Timer Instance */
XScuGic IntcInstance; /* Interrupt Controller Instance */
XGpioPs Gpio;
DisplayCtrl dispCtrl;
XAxiVdma vdma;
volatile int TimerExpired;
volatile uint8_t trigger_cpu1 = 1;
/*
* Framebuffers for video data
*/
u8 frameBuf[DISPLAY_NUM_FRAMES][DEMO_MAX_FRAME] __attribute__ ((aligned(64)));
u8 *pFrames[DISPLAY_NUM_FRAMES]; //array of pointers to the frame buffers
static void Steph_AXI_LED_On(void)
{
WR_32BIT_REG(AXI_GPIO_0_BASE_ADDR + GPIO_DATA_OFFSET, 0x00);
}
static void Steph_AXI_LED_Off(void)
{
WR_32BIT_REG(AXI_GPIO_0_BASE_ADDR + GPIO_DATA_OFFSET, 0x0F);
}
static void Steph_AXI_GPIO_Init(void)
{
// Set as output
Steph_AXI_LED_Off();
WR_32BIT_REG(AXI_GPIO_0_BASE_ADDR + GPIO_TRI_OFFSET, 0x00);
}
static void Steph_PWM_ConfigCycle(uint32_t cycle)
{
STEPH_AXI_PWM_mWriteReg(XPAR_STEPH_AXI_PWM_0_S00_AXI_BASEADDR, STEPH_AXI_PWM_S00_AXI_SLV_REG0_OFFSET, cycle);
}
static void Steph_PWM_ConfigDuty(uint32_t duty)
{
STEPH_AXI_PWM_mWriteReg(XPAR_STEPH_AXI_PWM_0_S00_AXI_BASEADDR, STEPH_AXI_PWM_S00_AXI_SLV_REG1_OFFSET, duty);
}
static void Steph_AXI_PWM_Init(void)
{
// The frequency of the PWM controller is 50MHz
Steph_PWM_ConfigCycle(PWM_CYCLE);
Steph_PWM_ConfigDuty(0x00);
}
uint32_t Steph_LEDInit(void)
{
XGpioPs_Config *ConfigPtr = NULL;
int Status = XST_SUCCESS;
ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);
if(!ConfigPtr)
{
xil_printf("XGpioPs_LookupConfig Error.\r\n");
return XST_FAILURE;
}
Status = XGpioPs_CfgInitialize(&Gpio, ConfigPtr,
ConfigPtr->BaseAddr);
if (Status != XST_SUCCESS) {
xil_printf("XGpioPs_CfgInitialize Error.\r\n");
return XST_FAILURE;
}
// For MIO
XGpioPs_SetDirectionPin(&Gpio, STEPH_MIO_0, MIO_OUTPUT);
XGpioPs_SetDirectionPin(&Gpio, STEPH_MIO_1, MIO_OUTPUT);
XGpioPs_SetOutputEnablePin(&Gpio, STEPH_MIO_0, MIO_OUTPUT_EN);
XGpioPs_SetOutputEnablePin(&Gpio, STEPH_MIO_1, MIO_OUTPUT_EN);
xil_printf("Steph_LED MIO Initialize Finished...\r\n");
// For EMIO
XGpioPs_SetDirectionPin(&Gpio, STEPH_EMIO_0, MIO_OUTPUT);
XGpioPs_SetOutputEnablePin(&Gpio, STEPH_EMIO_0, MIO_OUTPUT_EN);
xil_printf("Steph_LED EMIO Initialize Finished...\r\n");
Steph_AXI_GPIO_Init();
xil_printf("Steph_LED AXI GPIO Initialize Finished...\r\n");
Steph_AXI_PWM_Init();
xil_printf("Steph_LED AXI PWM Initialize Finished...\r\n");
return Status;
}
void LED_OFF(uint32_t pin)
{
XGpioPs_WritePin(&Gpio, pin, 0x1);
}
void LED_ON(uint32_t pin)
{
XGpioPs_WritePin(&Gpio, pin, 0x0);
}
static void Steph_SetupCpu1(void)
{
xil_printf("Close Cache...\r\n");
Xil_SetTlbAttributes(0xFFFF0000, 0x14de2);
xil_printf("Waking up CPU1...\r\n");
Xil_Out32(WAKEUP_CPU1_ADDR, CPU1_RUN_ADDR);
dmb();
sev();
}
unsigned long Steph_GetSiliconVersion (void) {
// Read PS version from MCTRL register [31:28]
unsigned long mask = 0xF0000000;
unsigned long *addr = (unsigned long*) 0XF8007080;
unsigned long ps_version = (*addr & mask) >> 28;
return ps_version;
}
int _Steph_RegisterIRQHandler(XScuGic *InstancePtr, uint16_t IntId, void *Handler, void *CallBackRef)
{
int Status = XST_SUCCESS;
Status = XScuGic_Connect(InstancePtr, IntId,
(Xil_ExceptionHandler)Handler, (void *)CallBackRef);
FNC_CHECK_RETURN(Status);
XScuGic_Enable(InstancePtr, IntId);
return Status;
}
int Steph_RegisterScuTimerHandler(void *Handler)
{
return _Steph_RegisterIRQHandler(&IntcInstance, TIMER_IRPT_INTR, (void *)Handler, (void *)&TimerInstance);
}
int Steph_RegisterSoftwareHandler(void *Handler)
{
return _Steph_RegisterIRQHandler(&IntcInstance, SOFTWARE_IRQ_ID_TO_CPU0, (void *)Handler, (void *)&IntcInstance);
}
int Steph_GicInit(void)
{
int Status = XST_SUCCESS;
XScuGic_Config *IntcConfig;
XScuGic *IntcInstancePtr = &IntcInstance;
IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);
FNC_CHECK_NULL_POINTER(IntcConfig);
Status = XScuGic_CfgInitialize(IntcInstancePtr, IntcConfig, IntcConfig->CpuBaseAddress);
FNC_CHECK_RETURN(Status);
Xil_ExceptionInit();
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_IRQ_INT, (Xil_ExceptionHandler)XScuGic_InterruptHandler, IntcInstancePtr);
Xil_ExceptionEnable();
return Status;
}
int Steph_ScuTimerInit(void)
{
int Status = XST_SUCCESS;
XScuTimer_Config *ConfigPtr;
XScuTimer *TimerInstancePtr = &TimerInstance;
ConfigPtr = XScuTimer_LookupConfig(TIMER_DEVICE_ID);
Status = XScuTimer_CfgInitialize(TimerInstancePtr, ConfigPtr, ConfigPtr->BaseAddr);
FNC_CHECK_RETURN(Status);
Status = XScuTimer_SelfTest(TimerInstancePtr);
FNC_CHECK_RETURN(Status);
XScuTimer_EnableAutoReload(TimerInstancePtr);
XScuTimer_LoadTimer(TimerInstancePtr, TIMER_LOAD_VALUE);
XScuTimer_EnableInterrupt(TimerInstancePtr);
Steph_RegisterScuTimerHandler((void *)TimerIRQHandler);
XScuTimer_Start(TimerInstancePtr);
return Status;
}
int Steph_SoftwareInterruptInit(void)
{
return Steph_RegisterSoftwareHandler((void *)SoftwareIRQHandler);
}
/*
*
* Video Engine Initialize Functions
*
*/
void DemoPrintTest(u8 *frame, u32 width, u32 height, u32 stride, int pattern)
{
u32 xcoi, ycoi;
u32 iPixelAddr = 0;
u8 wRed, wBlue, wGreen;
u32 xInt;
u32 pic_number=0;
switch (pattern)
{
case DEMO_PATTERN_0:
for(ycoi = 0; ycoi < 600; ycoi++)
{
for(xcoi = 0; xcoi < (800 * BYTES_PIXEL); xcoi+=BYTES_PIXEL)
{
frame[xcoi + iPixelAddr + 0] = gImage_pic_800_600[pic_number++];
frame[xcoi + iPixelAddr + 1] = gImage_pic_800_600[pic_number++];
frame[xcoi + iPixelAddr + 2] = gImage_pic_800_600[pic_number++];
}
iPixelAddr += stride;
}
/*
* Flush the framebuffer memory range to ensure changes are written to the
* actual memory, and therefore accessible by the VDMA.
*/
Xil_DCacheFlushRange((unsigned int) frame, DEMO_MAX_FRAME);
break;
case DEMO_PATTERN_1: //Grid
for(ycoi = 0; ycoi < height; ycoi++)
{
for(xcoi = 0; xcoi < (width * BYTES_PIXEL); xcoi+=BYTES_PIXEL)
{
if (((xcoi/BYTES_PIXEL)&0x20)^(ycoi&0x20)) {
wRed = 255;
wGreen = 255;
wBlue = 255;
}
else{
wRed = 0;
wGreen = 0;
wBlue = 0;
}
frame[xcoi + iPixelAddr + 0] = wBlue;
frame[xcoi + iPixelAddr + 1] = wGreen;
frame[xcoi + iPixelAddr + 2] = wRed;
}
iPixelAddr += stride;
}
/*
* Flush the framebuffer memory range to ensure changes are written to the
* actual memory, and therefore accessible by the VDMA.
*/
Xil_DCacheFlushRange((unsigned int) frame, DEMO_MAX_FRAME);
break;
case DEMO_PATTERN_2://8 intervals color bar
for(ycoi = 0; ycoi < height; ycoi++)
{
for(xcoi = 0; xcoi < (width * BYTES_PIXEL); xcoi+=BYTES_PIXEL)
{
frame[xcoi + iPixelAddr + 0] = xcoi/BYTES_PIXEL;
frame[xcoi + iPixelAddr + 1] = xcoi/BYTES_PIXEL;
frame[xcoi + iPixelAddr + 2] = xcoi/BYTES_PIXEL;
}
iPixelAddr += stride;
}
/*
* Flush the framebuffer memory range to ensure changes are written to the
* actual memory, and therefore accessible by the VDMA.
*/
Xil_DCacheFlushRange((unsigned int) frame, DEMO_MAX_FRAME);
break;
case DEMO_PATTERN_3: //8 intervals color bar
xInt = width*BYTES_PIXEL / 8; //each with width/8 pixels
for(ycoi = 0; ycoi < height; ycoi++)
{
/*
* Just draw white in the last partial interval (when width is not divisible by 7)
*/
for(xcoi = 0; xcoi < (width*BYTES_PIXEL); xcoi+=BYTES_PIXEL)
{
if (xcoi < xInt) { //White color
wRed = 255;
wGreen = 255;
wBlue = 255;
}
else if ((xcoi >= xInt) && (xcoi < xInt*2)){ //YELLOW color
wRed = 255;
wGreen = 255;
wBlue = 0;
}
else if ((xcoi >= xInt*2) && (xcoi < xInt*3)){ //CYAN color
wRed = 0;
wGreen = 255;
wBlue = 255;
}
else if ((xcoi >= xInt*3) && (xcoi < xInt*4)){ //GREEN color
wRed = 0;
wGreen = 255;
wBlue = 0;
}
else if ((xcoi >= xInt*4) && (xcoi < xInt*5)){ //MAGENTA color
wRed = 255;
wGreen = 0;
wBlue = 255;
}
else if ((xcoi >= xInt*5) && (xcoi < xInt*6)){ //RED color
wRed = 255;
wGreen = 0;
wBlue = 0;
}
else if ((xcoi >= xInt*6) && (xcoi < xInt*7)){ //BLUE color
wRed = 0;
wGreen = 0;
wBlue = 255;
}
else { //BLACK color
wRed = 0;
wGreen = 0;
wBlue = 0;
}
frame[xcoi+iPixelAddr + 0] = wBlue;
frame[xcoi+iPixelAddr + 1] = wGreen;
frame[xcoi+iPixelAddr + 2] = wRed;
/*
* This pattern is printed one vertical line at a time, so the address must be incremented
* by the stride instead of just 1.
*/
}
iPixelAddr += stride;
}
/*
* Flush the framebuffer memory range to ensure changes are written to the
* actual memory, and therefore accessible by the VDMA.
*/
Xil_DCacheFlushRange((unsigned int) frame, DEMO_MAX_FRAME);
break;
default :
xil_printf("Error: invalid pattern passed to DemoPrintTest");
}
}
/********************************* Framebuffer Initialize *********************************/
void Steph_FrameBufferInit(void)
{
int i = 0;
/*
* Initialize an array of pointers to the 3 frame buffers
*/
for (i = 0; i < DISPLAY_NUM_FRAMES; i++)
{
pFrames[i] = frameBuf[i];
}
}
/********************************* Video Engine Initialize *********************************/
int Steph_VideoEngineInit(void)
{
int Status = XST_SUCCESS;
XAxiVdma_Config *vdmaConfig;
Steph_FrameBufferInit();
/*
* Initialize VDMA driver
*/
vdmaConfig = XAxiVdma_LookupConfig(VGA_VDMA_ID);
if (!vdmaConfig)
{
xil_printf("No video DMA found for ID %d\r\n", VGA_VDMA_ID);
}
Status = XAxiVdma_CfgInitialize(&vdma, vdmaConfig, vdmaConfig->BaseAddress);
if (Status != XST_SUCCESS)
{
xil_printf("VDMA Configuration Initialization failed %d\r\n", Status);
}
/*
* Initialize the Display controller and start it
*/
Status = DisplayInitialize(&dispCtrl, &vdma, DISP_VTC_ID, DYNCLK_BASEADDR, pFrames, DEMO_STRIDE);
if (Status != XST_SUCCESS)
{
xil_printf("Display Ctrl initialization failed during demo initialization%d\r\n", Status);
}
Status = DisplayStart(&dispCtrl);
if (Status != XST_SUCCESS)
{
xil_printf("Couldn't start display during demo initialization%d\r\n", Status);
}
DemoPrintTest(dispCtrl.framePtr[dispCtrl.curFrame], dispCtrl.vMode.width, dispCtrl.vMode.height, dispCtrl.stride, DEMO_PATTERN_0);
return Status;
}
int main(void)
{
uint32_t pwm_duty = 0;
xil_printf("####### StephenZhou CPU 0 #######\r\n");
xil_printf("SiliconVersion=0x%08X\r\n", Steph_GetSiliconVersion());
Steph_SetupCpu1();
xil_printf("SetupCpu1 Finished...\r\n");
Steph_LEDInit();
xil_printf("LED Init Finished...\r\n");
Steph_GicInit();
xil_printf("GIC Init Finished...\r\n");
Steph_ScuTimerInit();
xil_printf("Scu Timer Init Finished...\r\n");
Steph_SoftwareInterruptInit();
xil_printf("Software Interrupt Init Finished...\r\n");
Steph_VideoEngineInit();
xil_printf("Video Engine Init Finished...\r\n");
while (1)
{
if (pwm_duty < PWM_CYCLE)
{
pwm_duty += PWM_DUTY_STEP;
}
else
{
pwm_duty = 0;
}
Steph_PWM_ConfigDuty(pwm_duty);
usleep(1000);
if (trigger_cpu1)
{
// Software interrupt to CPU1
XScuGic_SoftwareIntr(&IntcInstance, SOFTWARE_IRQ_ID_TO_CPU1, CPU_1_ID);
trigger_cpu1 = 0;
}
}
return XST_SUCCESS;
}
static void TimerIRQHandler(void *CallBackRef)
{
XScuTimer *TimerInstancePtr = (XScuTimer *) CallBackRef;
/*
* Check if the timer counter has expired, checking is not necessary
* since that's the reason this function is executed, this just shows
* how the callback reference can be used as a pointer to the instance
* of the timer counter that expired, increment a shared variable so
* the main thread of execution can see the timer expired.
*/
if (XScuTimer_IsExpired(TimerInstancePtr)) {
XScuTimer_ClearInterruptStatus(TimerInstancePtr);
TimerExpired++;
if(TimerExpired%2)
{
LED_OFF(STEPH_MIO_0);
LED_OFF(STEPH_MIO_1);
LED_OFF(STEPH_EMIO_0);
Steph_AXI_LED_Off();
}
else
{
LED_ON(STEPH_MIO_0);
LED_ON(STEPH_MIO_1);
LED_ON(STEPH_EMIO_0);
Steph_AXI_LED_On();
}
xil_printf("Timer Counter=%d\r\n", TimerExpired);
}
}
static void SoftwareIRQHandler(void *CallBackRef)
{
xil_printf("Soft Interrupt from CPU1\r\n") ;
trigger_cpu1 = 1;
}














 436
436











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









