







转载请说明出处:http://blog.csdn.net/zhubaohua_bupt/article/details/75047273
在对视觉SLAM(VSLAM)的研究和实用中发现,VSLAM要想满足实用,
起码要满足三个条件:<1> 鲁棒性 <2> 实时性 <3> 精度
对于单目VSLAM,还可以提供尺度信息。14年,谷歌发布一个比较成熟的产品,名字叫tango。
VSLAM融合IMU是一个研究比较热门的方向,融合IMU可以改善VSLAM系统的稳定性,
这款产品是一个单目相机和IMU融合的产物,能够兼顾速度,以及实时性的特性。
目前几个开源的VSLAM在实验阶段效果还可以,但是一旦实用,要么鲁棒性不行,要么精度不够。
现在我们分析一下,纯视觉SLAM到应用的问题出现在哪。了解VSLAM都知道,目前,主流的VSLAM根据应用
的特征,分为两大类,一类是直接法,另一类是特征点发;根据算法和硬件设备的需求,分为单目、双目和RGBDSLAM
两大类。我们首先分析一下,VSLAM存在的共性问题。然后再分析一下各类VSLAM存在的问题。
1 VSLAM存在的共性问题
共性问题一:速度
无论是哪种VSLAM,只要纯依靠图像,在运动过快的时候,必然会出现图像模糊的问题。
我们知道,匹配是VSLAM建立数据关联的纽带,大量的误匹配,神也救不了啊。
因此,图像一旦模糊,那么整个系统就崩了,这个至目前还无法搞定。
共性问题二:环境
VSLAM对环境是有要求的,它在面临到弱(无)纹理(比如白墙),重复纹理,比如(相似的建筑物群),
也难以工作下去。弱纹理带来的影响是,几乎没有特征让VSLAM去提取,从而也就无法继续工作;
重复纹理给VSLAM带来的问题是,会造成误匹配,因此会造成错误的关联关系。
另一个比较苛刻的要求是,相机所能看到的环境,必须或者起码大部分是静态的。换句话说,
VSLAM对动态环境鲁棒性不足。在实际应用中,如果相机面前大部分场景都在动,相机会认为自身在动。
也就是说,一旦有大量的相对运动,VSLAM就会认为是自身在动,这个时候,鲁棒性就不行了。
共性问题三: 光照
在遇到明暗光交替的环境时,VSLAM很容易因为相机曝光成像的质量跟不上,从而造成匹配出错而挂掉。
以上就是VSLAM在实际应用上,共性的几个问题。
单双目VSLAM的优缺点
下面,我们分析一下,单双目VSLAM在应用中,都有哪些优缺点。首先,我们分析一下单目VSLAM。
单目VSLAM
优点是只用一个相机就可已完成工作,这个就限制了双目VSLAM很多场合的应用,
比如手机和小数码设备,一般不用双目,原因有二。
第一,多一个镜头,成本问题,当然,这不是主要原因。
第二,双目离开了基线(基线太短),还能叫双目!(退化成了单目)。
在较小的移动设备上,不可能让你把基线做那么大。
而且不用考虑双目相机因为长时间使用或碰撞造成的标定参数误差变大。
缺点是尺度不确定。
我们再来看一下双目VSLAM。
双目VSLAM
优点是方便获得场景深度信息,从而,没有像单目尺度模糊那样的问题。
缺点是对设备体积的要求,我们刚才说,微小移动设备一般不用双目。
RGBDVSLAM
优点:可直接获得场景深度信息,在VSALM在线工作时,减少了深度计算步骤,这一点,比单双目都要好,
RGBD相机也被认为是未来VSLAM最有前途的视觉传感器。
缺点:相对成本略高
3 直接法和特征点法的优缺点
接下来,我们分析一下直接法和特征点法的优缺点。
特征点法:
优点:目前绝大多数基于特性点法的VSLAM都是用的角点,这种VSLAM性能较好,
优点比较明显,就是角点对尺度、旋转和光照的鲁棒性要高于直接法中的梯度点,适合于长,短基线的匹配。
这样的话,基于特征的VSLAM对快速运动的鲁棒性要比直接法高。
缺点:但是,由于角点检测、描述、匹配耗时较长,因此实时性比直接法略逊一筹。
直接法:
优点是速度,因为特征往往是梯度点、边,提取简单,描述匹配简单(patch匹配)。
而且,建图比特征点法稠密。
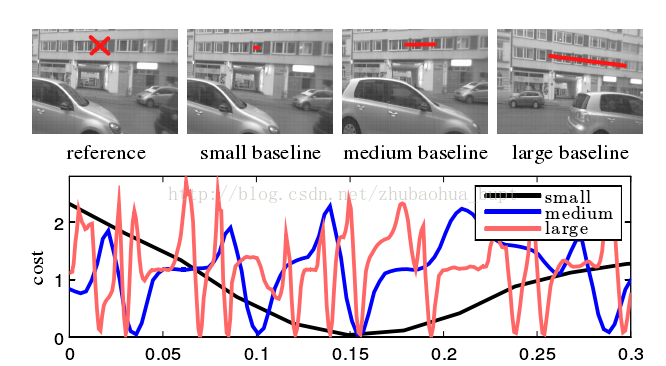
缺点是,对于快速运动的鲁棒性不足,只适合短基线的匹配,因为,在优化迭代位姿时,
相机运动过快->相邻帧基线过长->相邻帧像素偏差过大->位姿陷入一个错误的局部最优解。
下图是致力于直接法VSLAM作者Jakob Engel,测试的基线长度对匹配的影响。
尽管使用了金字塔来补偿,还是没有特征点法效果好。
因为角点对尺度、旋转和光照的鲁棒性要高于直接法中的梯度点。
至此我们分析了VSLAM中比较流行算法的优缺点以及整个VSLAM的问题。
本人认为,接下来VSLAM要想走向实用,要努力的方向应该是与多传感器融合,提高算法的鲁棒性。














 4097
4097











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









