







前言:这篇文章是目的是分析jz2410开发板使用的uboot-2012.04.01的启动过程,参考了很多文件,这里整理一下
注:
启动的第一到第四部分简单列出了代码,没有对代码为什么这么写进行分析,之后从第五部分内存划分开始,仔细的分析了代码。
一、启动流程图
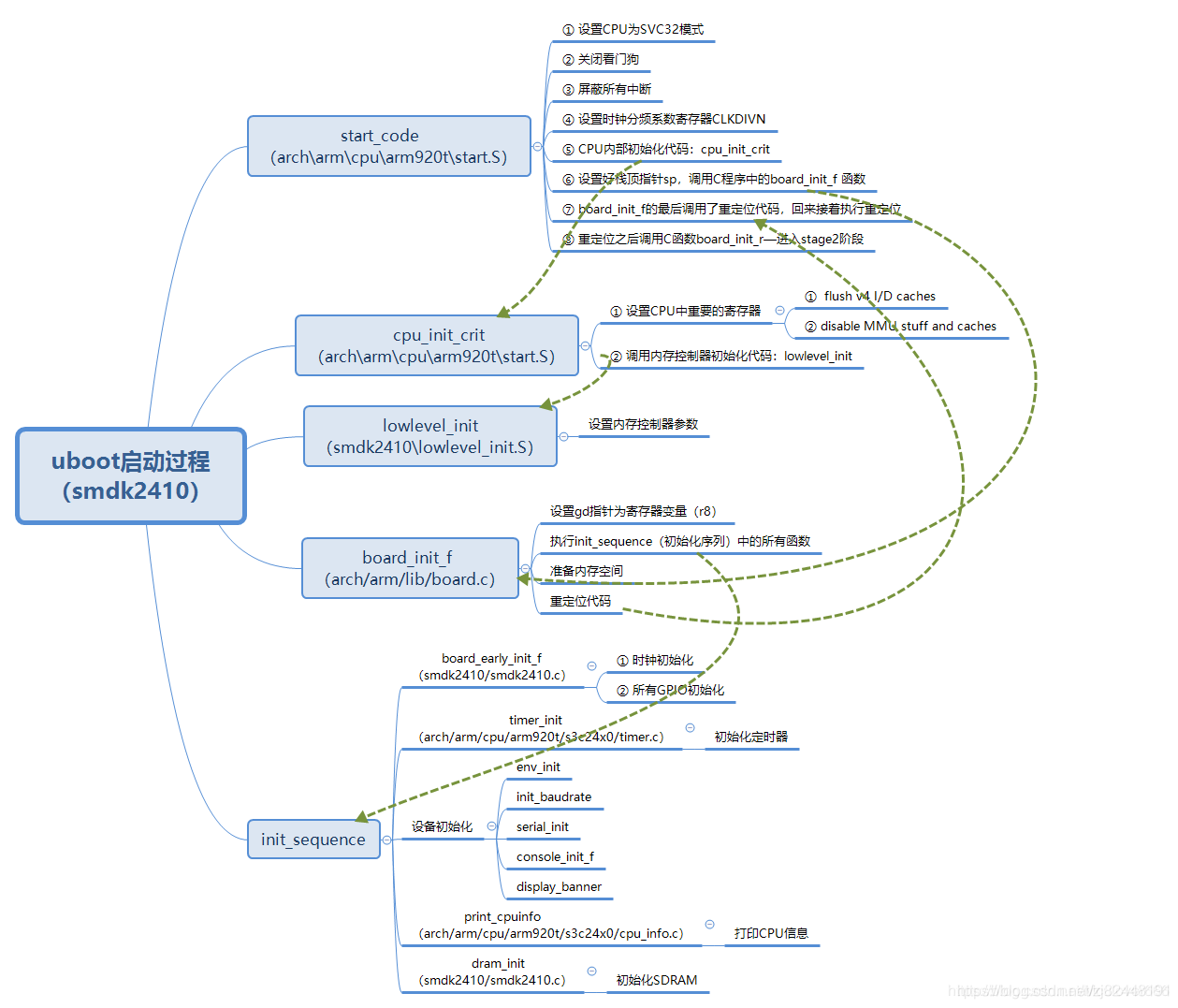
这里的启动流程图很清晰的分析了uboot的启动过程,值得参考
二、启动步骤分析
首先在之前的编译与配置分析中,我们知道第一个执行的文件是arch/arm/cpu/arm920t/start.S这个文件,所以我们就从这个文件开始分析。
第一部分:异常向量表
.globl _start
_start: b start_code //上电之后先从这里执行
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
_undefined_instruction: .word undefined_instruction
_software_interrupt: .word software_interrupt
_prefetch_abort: .word prefetch_abort
_data_abort: .word data_abort
_not_used: .word not_used
_irq: .word irq
_fiq: .word fiq
第二部分:切换运行模式为管理模式
这部分代码是实现模式的切换,将模式切换为管理模式。
start_code:
/*
* set the cpu to SVC32 mode
*/
mrs r0, cpsr
bic r0, r0, #0x1f
orr r0, r0, #0xd3
msr cpsr, r0
第三部分:关闭看门狗、屏蔽中断、设置时钟
#ifdef CONFIG_S3C24X0
/* turn off the watchdog */
#if defined(CONFIG_S3C2400)
#define pWTCON 0x15300000
#define INTMSK 0x14400008 /* Interrupt-Controller base addresses */
#define CLKDIVN 0x14800014 /* clock divisor register */
#else
#define pWTCON 0x53000000
#define INTMSK 0x4A000008 /* Interrupt-Controller base addresses */
#define INTSUBMSK 0x4A00001C
#define CLKDIVN 0x4C000014 /* clock divisor register */
#endif
ldr r0, =pWTCON
mov r1, #0x0
str r1, [r0]
/*
* mask all IRQs by setting all bits in the INTMR - default
*/
mov r1, #0xffffffff
ldr r0, =INTMSK
str r1, [r0]
#if defined(CONFIG_S3C2410)
ldr r1, =0x3ff
ldr r0, =INTSUBMSK
str r1, [r0]
#endif
/* FCLK:HCLK:PCLK = 1:2:4 */
/* default FCLK is 120 MHz ! */
ldr r0, =CLKDIVN
mov r1, #3
str r1, [r0]
#endif /* CONFIG_S3C24X0 */
第四部分:关闭cache,mmu及初始化内存控制器
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
bl cpu_init_crit //这个函数定义在该start.S文件中
#endif
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
cpu_init_crit:
/*
* flush v4 I/D caches
*/
mov r0, #0
mcr p15, 0, r0, c7, c7, 0 /* flush v3/v4 cache */
mcr p15, 0, r0, c8, c7, 0 /* flush v4 TLB */
/*
* disable MMU stuff and caches
*/
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002300 @ clear bits 13, 9:8 (--V- --RS)
bic r0, r0, #0x00000087 @ clear bits 7, 2:0 (B--- -CAM)
orr r0, r0, #0x00000002 @ set bit 2 (A) Align
orr r0, r0, #0x00001000 @ set bit 12 (I) I-Cache
mcr p15, 0, r0, c1, c0, 0
/*
* before relocating, we have to setup RAM timing
* because memory timing is board-dependend, you will
* find a lowlevel_init.S in your board directory.
*/
mov ip, lr
bl lowlevel_init //cpu相关的一些初始化
mov lr, ip
mov pc, lr
#endif /* CONFIG_SKIP_LOWLEVEL_INIT */
下面分析lowlevel_init函数,这个函数位于board/samsung/smdk2410/lowlevel_init.S文件中,是关于没存控制器的初始化。
TEXT_BASE:
.word CONFIG_SYS_TEXT_BASE
.globl lowlevel_init
lowlevel_init:
/* memory control configuration */
/* make r0 relative the current location so that it */
/* reads SMRDATA out of FLASH rather than memory ! */
ldr r0, =SMRDATA
ldr r1, _TEXT_BASE
sub r0, r0, r1
ldr r1, =BWSCON /* Bus Width Status Controller */
add r2, r0, #13*4
0:
ldr r3, [r0], #4
str r3, [r1], #4
cmp r2, r0
bne 0b
/* everything is fine now */
mov pc, lr
.ltorg
/* the literal pools origin */
SMRDATA:
.word (0+(B1_BWSCON<<4)+(B2_BWSCON<<8)+(B3_BWSCON<<12)+(B4_BWSCON<<16)+(B5_BWSCON<<20)+(B6_BWSCON<<24)+(B7_BWSCON<<28))
.word ((B0_Tacs<<13)+(B0_Tcos<<11)+(B0_Tacc<<8)+(B0_Tcoh<<6)+(B0_Tah<<4)+(B0_Tacp<<2)+(B0_PMC))
.word ((B1_Tacs<<13)+(B1_Tcos<<11)+(B1_Tacc<<8)+(B1_Tcoh<<6)+(B1_Tah<<4)+(B1_Tacp<<2)+(B1_PMC))
.word ((B2_Tacs<<13)+(B2_Tcos<<11)+(B2_Tacc<<8)+(B2_Tcoh<<6)+(B2_Tah<<4)+(B2_Tacp<<2)+(B2_PMC))
.word ((B3_Tacs<<13)+(B3_Tcos<<11)+(B3_Tacc<<8)+(B3_Tcoh<<6)+(B3_Tah<<4)+(B3_Tacp<<2)+(B3_PMC))
.word ((B4_Tacs<<13)+(B4_Tcos<<11)+(B4_Tacc<<8)+(B4_Tcoh<<6)+(B4_Tah<<4)+(B4_Tacp<<2)+(B4_PMC))
.word ((B5_Tacs<<13)+(B5_Tcos<<11)+(B5_Tacc<<8)+(B5_Tcoh<<6)+(B5_Tah<<4)+(B5_Tacp<<2)+(B5_PMC))
.word ((B6_MT<<15)+(B6_Trcd<<2)+(B6_SCAN))
.word ((B7_MT<<15)+(B7_Trcd<<2)+(B7_SCAN))
.word ((REFEN<<23)+(TREFMD<<22)+(Trp<<20)+(Trc<<18)+(Tchr<<16)+REFCNT)
.word 0x32
.word 0x30
.word 0x30
第五部分:初始化及内存划分
call_board_init_f:
ldr sp, =(CONFIG_SYS_INIT_SP_ADDR)
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
ldr r0,=0x00000000
bl board_init_f
这里设置栈指针sp=CONFIG_SYS_INIT_SP_ADDR,搜索CONFIG_SYS_INIT_SP_ADDR,在smdk2410.h文件中有定义:
#define PHYS_SDRAM_1 0x30000000 /* SDRAM Bank #1 */
#define CONFIG_SYS_SDRAM_BASE PHYS_SDRAM_1
#define CONFIG_SYS_INIT_SP_ADDR (CONFIG_SYS_SDRAM_BASE + 0x1000 - \
GENERATED_GBL_DATA_SIZE)
所以经过分析smdk2410.h文件,这里sp=0x30000000+0x1000-GENERATED_GBL_DATA_SIZE;
搜索GENERATED_GBL_DATA_SIZE,发现在文件/include/generic-asm-offsets.h中定义:
#define GENERATED_GBL_DATA_SIZE (128) /* (sizeof(struct global_data) + 15) & ~15 */
所以sp=0x30000000+0x1000-128
sp=0x30000F80
设置好sp后,开始调用c函数board_init_f,参数为r0;
全局查找 board_init_f 函数,找到其在arch/arm/lib/board.c中定义,这个函数足足有200行,开始研究!
5.1gd指针
gd = (gd_t *) ((CONFIG_SYS_INIT_SP_ADDR) & ~0x07);
gd指针变量是一个寄存器变量,在arch/arm/include/asm/global_data.h文件中定义:
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r8")
这个宏定义将gd定义为一个指向gd_t类型的寄存器变量(优势:读写效率高),并将这个寄存器指定为CPU寄存器组中的r8寄存器。这个指针指向的地址就是之前汇编中sp指向的地址即0x30000F80。
5.2 init_sequence
在上面定义好了gd指向的地址之后,我们这里先进行init_sequence部分的分析,这个数组就定义在本文件中,下面代码中我将未用到的初始化函数做了注释。
init_fnc_t *init_sequence[] = {
#if defined(CONFIG_ARCH_CPU_INIT)
arch_cpu_init, /* basic arch cpu dependent setup */ //未用到
#endif
#if defined(CONFIG_BOARD_EARLY_INIT_F)
board_early_init_f,
#endif
#ifdef CONFIG_OF_CONTROL
fdtdec_check_fdt, //未用到
#endif
timer_init, /* initialize timer */
#ifdef CONFIG_FSL_ESDHC
get_clocks, //未用到
#endif
env_init, /* initialize environment */
init_baudrate, /* initialze baudrate settings */
serial_init, /* serial communications setup */
console_init_f, /* stage 1 init of console */
display_banner, /* say that we are here */
#if defined(CONFIG_DISPLAY_CPUINFO)
print_cpuinfo, /* display cpu info (and speed) */
#endif
#if defined(CONFIG_DISPLAY_BOARDINFO)
checkboard, /* display board info */ //未用到
#endif
#if defined(CONFIG_HARD_I2C) || defined(CONFIG_SOFT_I2C)
init_func_i2c, //未用到
#endif
dram_init, /* configure available RAM banks */
NULL,
};
接下来挨个查看这些函数的源码。
5.2.1 board_early_init_f
这个函数在board/samsung/smdk2410/smdk2410.c文件中定义,是一些与硬件平台相关的初始化,包括时钟初始化、GPIO初始化:
int board_early_init_f(void)
{
struct s3c24x0_clock_power * const clk_power =
s3c24x0_get_base_clock_power();
struct s3c24x0_gpio * const gpio = s3c24x0_get_base_gpio();
/* to reduce PLL lock time, adjust the LOCKTIME register */
writel(0xFFFFFF, &clk_power->locktime);
/* configure MPLL */
writel((M_MDIV << 12) + (M_PDIV << 4) + M_SDIV,
&clk_power->mpllcon);
/* some delay between MPLL and UPLL */
pll_delay(4000);
/* configure UPLL */
writel((U_M_MDIV << 12) + (U_M_PDIV << 4) + U_M_SDIV,
&clk_power->upllcon);
/* some delay between MPLL and UPLL */
pll_delay(8000);
/* set up the I/O ports */
writel(0x007FFFFF, &gpio->gpacon);
writel(0x00044555, &gpio->gpbcon);
writel(0x000007FF, &gpio->gpbup);
writel(0xAAAAAAAA, &gpio->gpccon);
writel(0x0000FFFF, &gpio->gpcup);
writel(0xAAAAAAAA, &gpio->gpdcon);
writel(0x0000FFFF, &gpio->gpdup);
writel(0xAAAAAAAA, &gpio->gpecon);
writel(0x0000FFFF, &gpio->gpeup);
writel(0x000055AA, &gpio->gpfcon);
writel(0x000000FF, &gpio->gpfup);
writel(0xFF95FFBA, &gpio->gpgcon);
writel(0x0000FFFF, &gpio->gpgup);
writel(0x002AFAAA, &gpio->gphcon);
writel(0x000007FF, &gpio->gphup);
return 0;
}
5.2.2. timer_init初始化
这个函数在arch/arm/cpu/arm920t/s3c24x0/timer.c中定义,用来初始化系统定时器:
int timer_init(void)
{
struct s3c24x0_timers *timers = s3c24x0_get_base_timers();
ulong tmr;
/* use PWM Timer 4 because it has no output */
/* prescaler for Timer 4 is 16 */
writel(0x0f00, &timers->tcfg0);
if (gd->tbu == 0) {
/*
* for 10 ms clock period @ PCLK with 4 bit divider = 1/2
* (default) and prescaler = 16. Should be 10390
* @33.25MHz and 15625 @ 50 MHz
*/
gd->tbu = get_PCLK() / (2 * 16 * 100);
gd->timer_rate_hz = get_PCLK() / (2 * 16);
}
/* load value for 10 ms timeout */
writel(gd->tbu, &timers->tcntb4);
/* auto load, manual update of timer 4 */
tmr = (readl(&timers->tcon) & ~0x0700000) | 0x0600000;
writel(tmr, &timers->tcon);
/* auto load, start timer 4 */
tmr = (tmr & ~0x0700000) | 0x0500000;
writel(tmr, &timers->tcon);
gd->lastinc = 0;
gd->tbl = 0;
return 0;
}
5.2.3. 设备初始化
这些函数用来初始化需要用到的设备,在通用设备驱动文件中定义:
env_init, /* initialize environment /
init_baudrate, / initialze baudrate settings /
serial_init, / serial communications setup /
console_init_f, / stage 1 init of console /
display_banner, / say that we are here */
5.2.4. print_cpuinfo
这个函数用来打印CPU信息,在arch/arm/cpu/arm920t/s3c24x0/cpu_info.c文件中:
int print_cpuinfo(void)
{
int i;
char buf[32];
/* the S3C2400 seems to be lacking a CHIP ID register */
#ifndef CONFIG_S3C2400
ulong cpuid;
struct s3c24x0_gpio * const gpio = s3c24x0_get_base_gpio();
cpuid = readl(&gpio->gstatus1);
printf("CPUID: %8lX\n", cpuid);
#endif
for (i = 0; i < ARRAY_SIZE(freq_f); i++)
printf("%cCLK: %8s MHz\n", freq_c[i], strmhz(buf, freq_f[i]()));
return 0;
}
5.2.5. dram_init
这个用来初始化SDRAM,在board/samsung/smdk2410/smdk2410.c文件中:
int dram_init(void)
{
/* dram_init must store complete ramsize in gd->ram_size */
gd->ram_size = PHYS_SDRAM_1_SIZE;
return 0;
}
PHYS_SDRAM_1_SIZE宏定义在上文中已经分析过了,为64MB
总结一下,初始化序列 init_sequence 主要是设备初始化工作:
① 硬件平台初始化:时钟系统初始化,GPIO初始化;
② 定时器初始化;
③ 外围设备初始化:串口、Flash等;
④ 打印CPU信息;
⑤ 初始化DRAM(SDRAM);
5.3. 准备内存空间
在 board_init_f 函数中,接下来的内容都是在准备内存空间,详细的代码和SDRAM中uboot准备的内存分布图如下:

5.4. 重定位代码
在准备完内存空间之后,就进入了这个函数的最末端,重定位代码,代码如下:
gd->relocaddr = addr; //uboot代码存储起始位置
gd->start_addr_sp = addr_sp; //用户栈顶位置
gd->reloc_off = addr - _TEXT_BASE; //偏移大小等于uboot起始代码存储位置-_TEXT_BASE,这里_TEXT_BASE等于0
debug("relocation Offset is: %08lx\n", gd->reloc_off);
memcpy(id, (void *)gd, sizeof(gd_t));
relocate_code(addr_sp, id, addr);
关于重定位代码的函数 relocate_code 是用汇编语言编写的,下一小节重点讲述,至此,board_init_f 函数研读完毕。
6. 重定位代码(relocate_code)
根据ARM子程序调用规则,C语言调用relocate_code函数时,传入的三个参数分别存放在R0、R1、R2寄存器中,所以在汇编代码被调用时,首先将这三个重要参数保存:
.globl relocate_code
relocate_code:
mov r4, r0 /* save addr_sp 保存栈顶指针的值到r4寄存器中 */
mov r5, r1 /* save addr of gd 保存gd指针的值到r5寄存器中*/
mov r6, r2 /* save addr of destination 保存addr的值到r6寄存器中 */
然后设置栈顶指针sp:
/* Set up the stack */
stack_setup:
mov sp, r4
重定位:
adr r0, _start //_start是程序起始地址
cmp r0, r6 //和要拷贝的目的地址比较一下
beq clear_bss //如果相同,跳过拷贝,直接跳到clear_bss处
mov r1, r6 //把目的地址加载到r1中
ldr r3, _bss_start_ofs //加载
add r2, r0, r3 /* r2 <- source end address copy的结束地址 */
copy_loop:
ldmia r0!, {r9-r10} /* copy from source address [r0] */
stmia r1!, {r9-r10} /* copy to target address [r1] */
cmp r0, r2 /* until source end address [r2] */
blo copy_loop
6.2. 修改变量和函数的链接地址
存放在Flash中的程序中,函数和变量的调用地址是基于0地址,现在拷贝到了SDRAM中,而SDRAM的基地址是0x3000_0000,所以需要对拷贝程序中所有的调用链接地址进行修改。
修改程序如下:
#ifndef CONFIG_SPL_BUILD
/*
* fix .rel.dyn relocations
*/
ldr r0, _TEXT_BASE /* r0 <- Text base */
sub r9, r6, r0 /* r9 <- relocation offset */
ldr r10, _dynsym_start_ofs /* r10 <- sym table ofs */
add r10, r10, r0 /* r10 <- sym table in FLASH */
ldr r2, _rel_dyn_start_ofs /* r2 <- rel dyn start ofs */
add r2, r2, r0 /* r2 <- rel dyn start in FLASH */
ldr r3, _rel_dyn_end_ofs /* r3 <- rel dyn end ofs */
add r3, r3, r0 /* r3 <- rel dyn end in FLASH */
fixloop:
ldr r0, [r2] /* r0 <- location to fix up, IN FLASH! */
add r0, r0, r9 /* r0 <- location to fix up in RAM */
ldr r1, [r2, #4]
and r7, r1, #0xff
cmp r7, #23 /* relative fixup? */
beq fixrel
cmp r7, #2 /* absolute fixup? */
beq fixabs
/* ignore unknown type of fixup */
b fixnext
fixabs:
/* absolute fix: set location to (offset) symbol value */
mov r1, r1, LSR #4 /* r1 <- symbol index in .dynsym */
add r1, r10, r1 /* r1 <- address of symbol in table */
ldr r1, [r1, #4] /* r1 <- symbol value */
add r1, r1, r9 /* r1 <- relocated sym addr */
b fixnext
fixrel:
/* relative fix: increase location by offset */
ldr r1, [r0]
add r1, r1, r9
fixnext:
str r1, [r0]
add r2, r2, #8 /* each rel.dyn entry is 8 bytes */
cmp r2, r3
blo fixloop
#endif`
6.3. 清除BSS
clear_bss:
#ifndef CONFIG_SPL_BUILD
ldr r0, _bss_start_ofs
ldr r1, _bss_end_ofs
mov r4, r6 /* reloc addr */
add r0, r0, r4
add r1, r1, r4
mov r2, #0x00000000 /* clear */
clbss_l:str r2, [r0] /* clear loop... */
add r0, r0, #4
cmp r0, r1
bne clbss_l
bl coloured_LED_init
bl red_led_on
#endif
7. 调用C函数board_init_r—进入stage2阶段
首先计算调用地址,存放到lr寄存器中,然后设置向该函数传入的参数(gd_t地址和dest_addr地址),最后加载lr寄存器的值到pc中,成功调用board_init_r函数:
ldr r0, _board_init_r_ofs
adr r1, _start
add lr, r0, r1
add lr, lr, r9
/* setup parameters for board_init_r */
mov r0, r5 /* gd_t */
mov r1, r6 /* dest_addr */
/* jump to it ... */
mov pc, lr
_board_init_r_ofs:
.word board_init_r - _start
这个函数在arch\arm\lib\board.c文件中,这个函数放在启动的第二阶段分析
参考:本文大部分内容参考该文档














 829
829











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









