







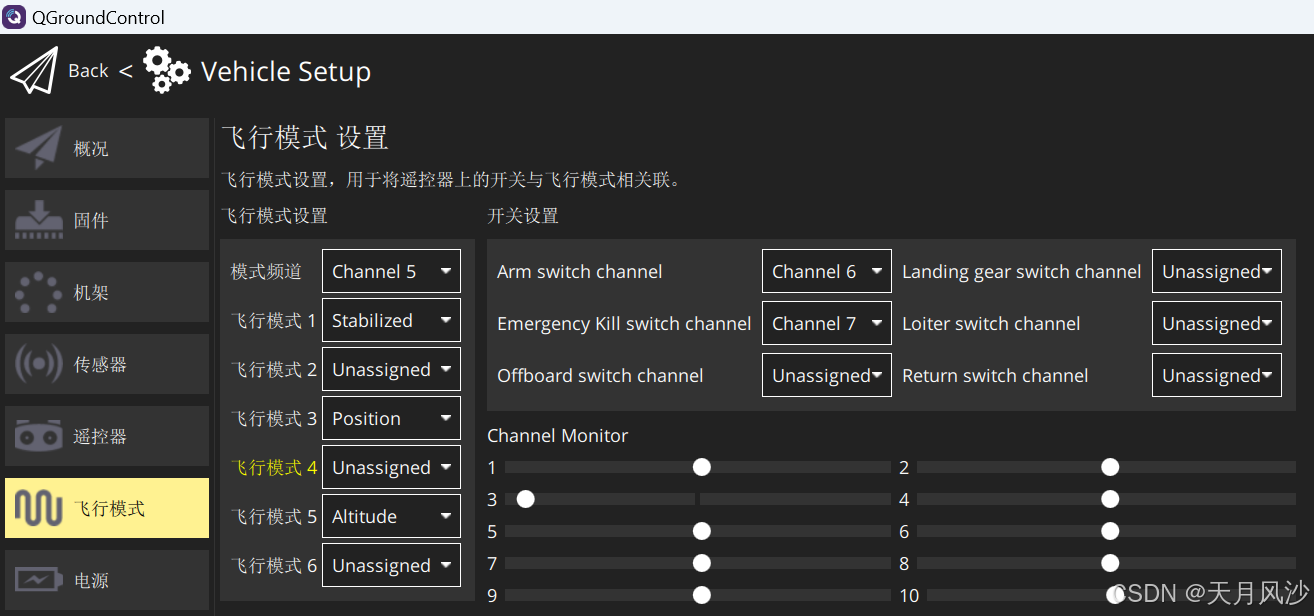
上图为PX4飞行模式设置界面,本文将详细介绍该设置界面的所有功能
PX4固件版本为1.14.3
QGC地面站版本为4.4.3
飞控使用,微空科技MicoAir743飞控,建议买他家MicoAir743V2,有蓝牙数传
模式频道
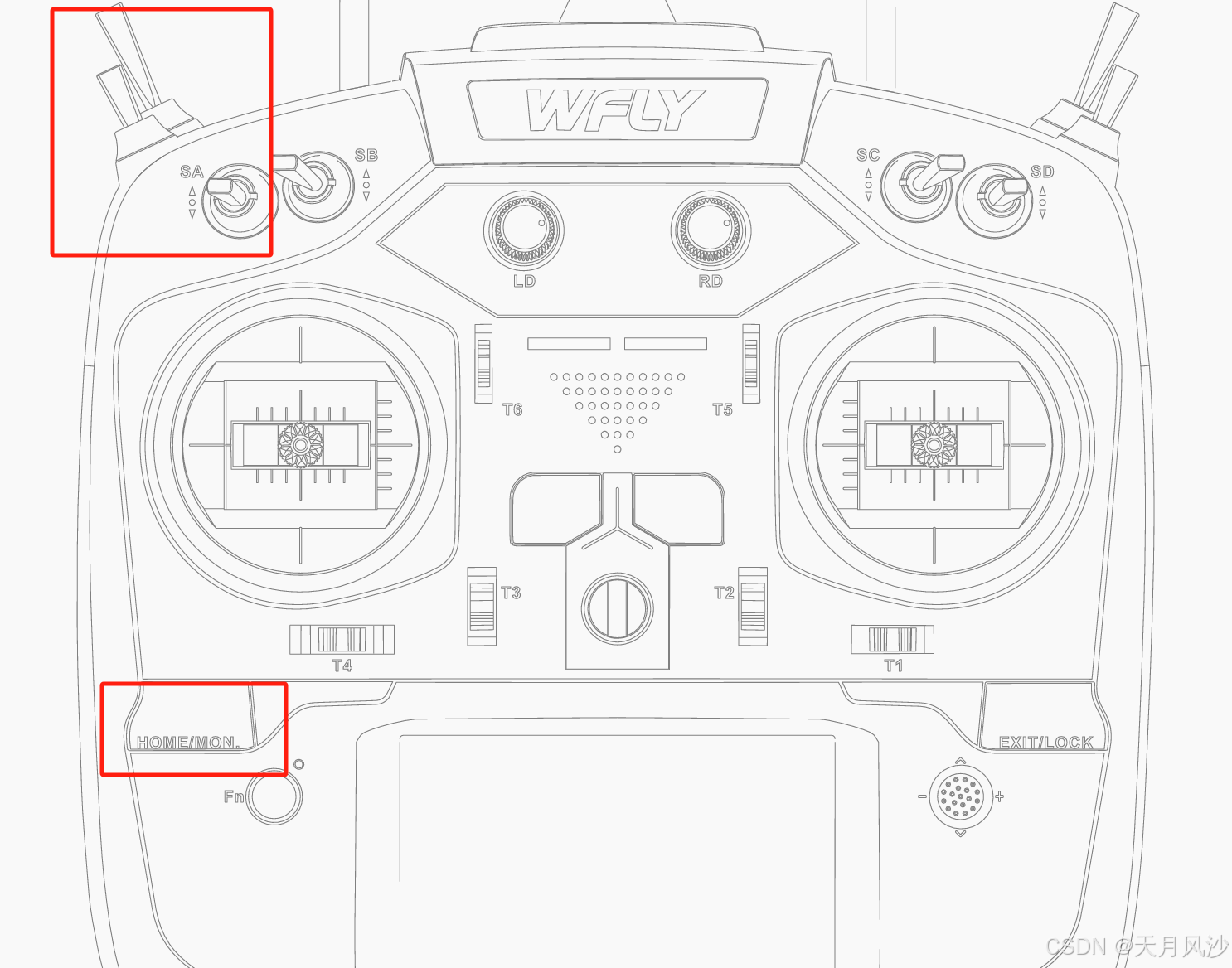
既选择你遥控器拨杆的通道,通常需要先在遥控器当中设置好。此处以天地飞ET16S遥控器为例,点击屏幕左上方按键home/mon.。通用功能——通道设置——在通道设置中前四个不可更改,从第五个开始可以自由选择。点击第五行的一列选择姿态选择1,在第五行第二列也就是控制那一列选择SE(根据个人习惯选择,遥控器上面写着SA/SB/SC.....),现在接收机的通道五就被设置成了姿态选择,同时也应当在遥控器通道设置的那几页中来回翻看确保一个开关对应一个通道对应一个模式
飞行模式
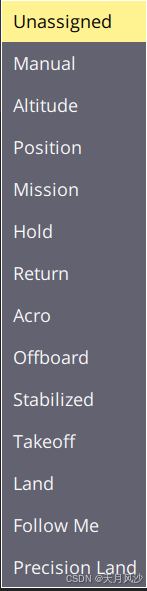
Altitude(定高)
Position(定点)
Mission(任务)
Hold(保持)
Return(返航)
Acro(特技模式)
Offboard
Stabilized(自稳)
Takeoff(起飞)
Land(降落)
Follow Me(跟随我)
Precision Land(精确着陆)
Altitude(定高)
定高模式是一种相对容易驾驶的RC模式,其中横滚和俯仰杆控制无人机在左右和前后(相对于无人机的“机头”)移动,方向杆控制无人机航向旋转速度,油门控制上升/降落速度(油门杆低于中位降落,中位保持高度,高于中位上升)。 当松开操纵杆/使其居中时,无人机将保持水平并保持当前高度。 如果在水平面内移动,无人机将继续行驶直到风阻消散了任何动能;如果有风吹,飞机将沿风向漂移(跟定点或悬停模式的区别在于不保持水平位置)
高度模式是新手最安全的非GPS手动模式。 就像姿态模式一样,但它能在松开操纵杆时还可以维持无人机的高度(油门杆需在中位)。
Position(定点)
该模式需要借助gps或光流或视觉定位才可以启动。定点模式是一种易于飞行的RC模式,其中,横滚和俯仰摇杆控制着左右、前后和方向(相对于无人机的“机头”)在地面上的速度,油门控制着上升和下降速度。 松开操纵杆使其居中时,无人机主动刹车,调平飞行姿态并锁定在3D空间中的某个位置,自动补偿风和其它作用力。
位置模式是新手上手最安全的模式。 与“定高”和“自稳”模式不同,当操纵杆居中时,无人机将停止行驶,而不是继续行驶直到由于风阻而减速。
Stabilized(自稳)
当RC控制杆居中时,自稳模式下,无人机自动调整至水平平衡“, 要手动控制无人机移动,您需要将操作杆移到中心以外;区别定点模式,其不保持水平位置也不保持垂直高度,只保持无人机的姿态处于水平(极接近水平)。
在手动控制下,俯仰和横滚杆控制无人机的角度(高度),方向杆控制水平面上方的旋转速率,油门控制高度/速度;该模式下您需要时刻操作操纵杆控制无人机水平和高度(非常您的飞机调试的非常理想并且没有任何风或外力否则无法保持位置和高度)
Hold(保持)模式
使多轴直升机停止并悬停在其当前位置和高度(保持位置抵抗风和其他力)。 该模式可用于暂停任务或在紧急情况下帮助您重新获得对无人机的控制。 您可以使用预编程的RC模式开关或 QGroundControl (Pause)暂停按钮激活它。
Return(返航)模式
需要使用gps,会使无人机返回到安全的地方 该模式可以手动(遥控器开关)激活,也可以自动(即在触发安全设置的情况下激活)。 返回行为取决于参数设置,并且可能遵循任务路径和/或任务着陆模式(如果已定义)。 默认情况下,无人机上升到安全高度,飞到其原始位置(home点),然后降落。
Acro(特技)模式
穿越机用的,用于执行特技操作,例如3D翻转飞行。 横滚、俯仰和方向杆控制围绕相应轴的角旋转速率,并且油门门直接传递到输出混合器。 当操纵杆居中时,无人机将停止旋转,但保持其当前方向(在其侧面,倒转等)并根据其当前动量移动。
Offboard 模式
使多轴直升机服从MAVLink上提供的位置,速度或姿态设定值。
此模式适用于配套计算机和地面站!得外接机载计算机(树莓派等)用!
开关设置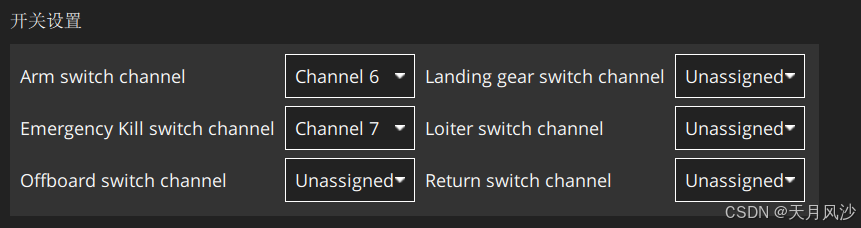
Arm switch channel(解锁通道)
解锁无人机通常情况是将油门摇杆往右下方打的方式进行解锁,该设置可以选择一个遥控器两段开关(如SF)作为无人机解锁上锁的操作开关,再配置好通道就行,比传统油门解锁方便
Emergency Kill switch channel(刹车通道):非常有必要进行设置,以便紧急状况下使用该通道来强制上锁飞控,避免意外。
Offboard switch channel
给外接机在电脑用的,但是你都外接电脑了,一般都得在其在机载电脑上控制offbroad模式,实际作用约等于没有。(个人实际使用下的评价)
Landing gear switch channel
控制起落架收放,是固定翼飞机用的,多旋翼用不上
Loiter switch channel
Loiter 模式是控制无人系统的一种更易访问的模式,一旦用户不向RC控制器提供输入,它便保持无人系统的当前位置,方向和高度。此模式与Stabilized(自稳)模式类似,但是一旦用户将手指从RC操纵杆中拿出,无人机系统将控制其位置,航向和高度。该模式需要借助gps或光流或视觉定位才可以启动。
Return switch channel
回家的,要用gps。

















 7461
7461

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









