







转自:http://blog.csdn.net/mhjerry/article/details/6600414,写的非常好!
应该说现在每一块开发板都带有红外模块,并且大都配置了相应的程序。 但其实自己动手写解码程序,更能锻炼自己所学,且不谈程序写的如何,这个过程中肯定是受益良多的。现在我就把我花一下午写出的解码程序与大家分享,期待高手的光临指正
但其实自己动手写解码程序,更能锻炼自己所学,且不谈程序写的如何,这个过程中肯定是受益良多的。现在我就把我花一下午写出的解码程序与大家分享,期待高手的光临指正 。
。
首先,必须要了解一些基本原理。其实按下遥控器的某一个键,遥控器会发出一连串经过调制后的信号,这个信号经过红外一体化模块接收后,输出解调后的数字脉冲,每个按键对应不同的脉冲,故识别出不同的脉冲就能识别出不同的按键。

上图就是很常见的车载MP3遥控器,比较小巧,很好用。下面是红外发射和接受原理:

到此读者可能会有疑惑,那么不同的调制解调方法那么出来的脉冲规则是不一样的?是的,的确如此。
遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC的uPD6121G组成发射电路为例说明编码原理(一般家庭用的DVD、VCD、音响都使用这种编码方式)。当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。这种遥控码具有以下特征:
采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图所示。
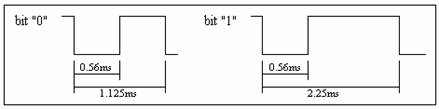
如图可见,0与1前端的低电平持续都是0.56ms,那么就是后面的高电平持续时间不同,0为0.56ms,1为1.685ms,找到不同之处,编程时就有识别的依据了!
上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。然后再通过红外发射二极管产生红外线向空间发射,如图所示。

UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。UPD6121G最多额128种不同组合的编码。
请看下图,来自网络:

当一个键按下超过36ms,振荡器使芯片激活,将发射一组108ms的编码脉冲,这108ms发射代码由一个引导码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址码(9ms~18ms),8位数据码(9ms~18ms)和这8位数据的反码(9ms~18ms)组成。如果键按下超过108ms仍未松开,接下来发射的代码(连发码)将仅由起始码(9ms)和结束码(2.25ms)组成。(实际上人手的动作是很慢的,即使你快速的按下按键,可能对于芯片来说还是超过108ms,所以如何处理连发码是很关键的)
遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间,图为发射波形图。


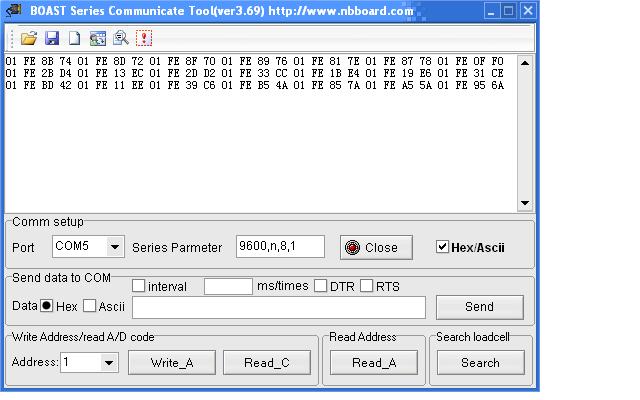
下面是我写的代码,按键编码通过串口发送到电脑端:
由于时间关系,代码注释不多。
其中START_Judge()函数是判断9ms低电平,既是判断有无遥控信号。
BOOT_REPEATING_CODE_Judge()是判断是引导码还是连发码,引导码则进入接受数据环节,连发码表明数据已经接受结束。
H_L_LEVEL_Judge()是接受数据时判断高低电平。
如果乱码,请参考:
http://blog.csdn.net/mhjerry/article/details/6601324
注明:以下代码为纯软件方式,没有用到中断,定时器方式,纯CPU查询,但测试结果倒也可以,至少比较稳定,得到的码值不管对不对,都是那个值。
编辑如下:
01 FE 8B 74 --- 01 FE 8D 72 --- 01 FE 8F 70
01 FE 89 76 --- 01 FE 81 7E --- 01 FE 87 78
01 FE 0F F0 --- 01 FE 2B D4 --- 01 FE 13 EC
01 FE 2D D2 --- 01 FE 33 CC --- 01 FE 1B E4
01 FE 19 E6 --- 01 FE 31 CE --- 01 FE BD 42
01 FE 11 EE --- 01 FE 39 C6 --- 01 FE B5 4A
以上为对应按键的编码。
过程中存在问题:
一是如何有效的识别引导码和连发码,因为这个能直接影响到长时间按键,单片机的响应与否。这个问题,貌似我以解决,就是长时间按键后,单片机识别一次按键后,如果还是同一按键,就不与理睬。
还有一个问题就是,如果连续按下两次按键,该程序能够识别出,但是如果间隔很短,第二下按键的编码容易出错,容易变成这样:
03 FE 8B 74.。。。就是第一个字节出现误差,这个问题现在还未来得及解决。
还有就是本程序对于延时函数的精度要求很高,因为本身处理的脉冲就是MS级别的。所以需要严格的测试延时函数的实际延时时间:
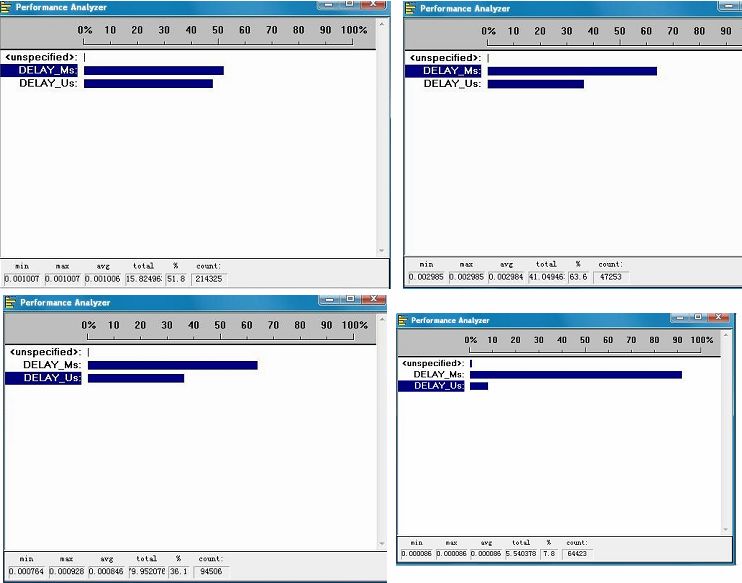
以上的代码,可以看出许多问题,软件延时不准确,大量的“while( IR_Out == 0 ) ;”代码,抗干扰能力弱,容易进入死循环。
下面介绍的这种解码方法,利用外部中断触发程序,定时器定时(但没有设置定时中断程序,即判断TF的值确定定时结束),在代码过程中,开头的一个7.93ms延时,足以滤掉不合法的红外信号。应该说效率质量更高的。
代码注释很详细,在此不在细述:















 3480
3480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









