







|
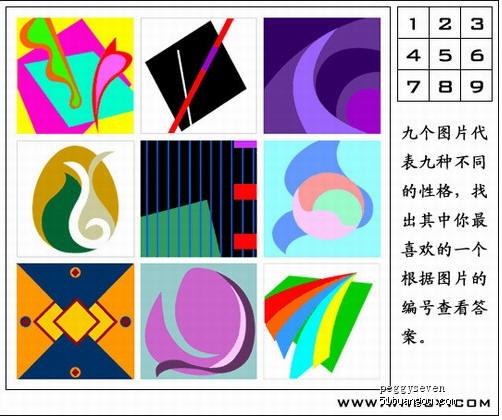
1.无忧无虑,顽皮,愉快的人
你喜欢自由自在,无拘无束的生活。 你的座右铭是:生命只能活一次,因此你尽量享受每一刻。 你好奇心旺盛,对新事物抱有开放的态度;你向往改变,讨厌束缚。 你觉得身边的环境都不断在变,而且经常为你带来惊喜。 2. 独立,前卫,不受拘束 你追求自由及不受拘束,自我的生活。 你的工作及消闲活动都与艺术有关。 你对于自由的渴求有时候会使你做出令人出人意表的事。 你的生活方式极具个人色彩;你永远不会盲目追逐潮流。 相反地,你会根据自己的意思和信念去生活,就算是逆流而上也在所不惜。 |
|
3. 时常自我反省,敏感的思想家 你对于自己及四周的环境能够比一般人控制得更好更彻底。 你讨厌表面化及肤浅的东西;你宁愿独自一人也不愿跟别人闲谈,但你跟朋友的关系 却非常深入,这令你的心境保持和谐安逸。 你不介意长时间独自一人,而且绝少会觉得沉闷。 4. 务实,头脑清醒,和谐 你作风自然,喜欢简单的东西。 人们欣赏你脚踏实地,他们觉得你稳重,值得信赖。 你能够给予身边的人安全感,你给人一种亲切,温暖的感觉。 你对于俗气的,花花绿绿的东西都不屑一顾,对时装潮流抱着怀疑的态度; 对于你来说,衣服必须是实用及大方得体的。 |
|
5. 专业,实事求事,自信
你掌管自己的生活,你相信自己的能力多于相信命运的安排。 你以实际,简单的方式去解决问题。 你对日常生活中所遇到的事物抱有现实的睇法,并且能够应付自如。 人们知道你可担重任,因此都放心把大量工作交给你处理。 你那坚强的意志使你时刻都充满信心。 未达到自己的目标之前,你绝不罢休。 6. 温和,谨慎,无攻击性 你生性随和,但处事谨慎。 你很容易认识朋友,但同时享受你的私人时间及独立生活。 有时候,你会从人群中抽身而出,一个人静静地思考生活的意义,并自娱一番。 你需要个人的空间,因此有时会隐匿于美梦当中,但你并不是一个爱孤独的人。 你跟自己及这个世界都能够和陆共处,而你对现状亦非常满意。 |
7. 具分析力,可靠,自信
你对事物的灵敏度令你可以发现到旁人忽略了的东西。
这些就是你的宝石,你喜欢发掘这些美好的东西。
你的教养对于你的生活有很特别的影响。
你有自己高雅独特的一套,无视任何时装潮流。
你的理想生活是优雅而愉快的,而你亦希望跟你接触的人们都是高雅而有教养的。
8. 浪漫,爱幻想,情绪化
你是一个感性的人。你拒绝只从一个严肃,理智的角度去理解事物。
你的感觉亦十分重要。事实上,你觉得人生必需要有梦想才叫活得充实。
你不接受那些轻视浪漫主义及被理智牵着鼻子走的人;
而且不会让任何事物影响到你那丰富的感情及情绪。
你对事物的灵敏度令你可以发现到旁人忽略了的东西。
这些就是你的宝石,你喜欢发掘这些美好的东西。
你的教养对于你的生活有很特别的影响。
你有自己高雅独特的一套,无视任何时装潮流。
你的理想生活是优雅而愉快的,而你亦希望跟你接触的人们都是高雅而有教养的。
8. 浪漫,爱幻想,情绪化
你是一个感性的人。你拒绝只从一个严肃,理智的角度去理解事物。
你的感觉亦十分重要。事实上,你觉得人生必需要有梦想才叫活得充实。
你不接受那些轻视浪漫主义及被理智牵着鼻子走的人;
而且不会让任何事物影响到你那丰富的感情及情绪。
9. 精力充沛,好动,外向
你不介意冒险,特别喜欢有趣的,多元化的工作。
相比之下,例行公事及惯例会令你没精打采。
你最兴奋的是可以积极参与任何比赛活动,因为这样你就可以在众人面前大显身手了。
你不介意冒险,特别喜欢有趣的,多元化的工作。
相比之下,例行公事及惯例会令你没精打采。
你最兴奋的是可以积极参与任何比赛活动,因为这样你就可以在众人面前大显身手了。
from
智星论坛(IQSTAR BBS) by
一灯
其他文章:
<script src="http://pagead2.googlesyndication.com/pagead/show_ads.js" type="text/javascript"></script>

















 2334
2334

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









