







 本文探讨了在Arm架构下,针对arm和thumb指令集的Inline Hook原理。讲解了如何处理指令修正,特别是涉及LDR/STR、ADD以及B系列指令时的处理方式,并通过实例说明了offset为立即数和寄存器时的操作步骤。文中还简单提到了thumb指令模式下更复杂的修正问题。
本文探讨了在Arm架构下,针对arm和thumb指令集的Inline Hook原理。讲解了如何处理指令修正,特别是涉及LDR/STR、ADD以及B系列指令时的处理方式,并通过实例说明了offset为立即数和寄存器时的操作步骤。文中还简单提到了thumb指令模式下更复杂的修正问题。
Arm架构下有arm指令和thumb指令之分,不同指令集的hook过程不一样。
假设我们要hook libc.so中的execv和read函数,android系统的库应该都加了-mthumb-interworking编译选项,支持thumb/arm的代码交织,所以要区分目标函数是thumb还是arm指令的。
用ndk编译自己的代码好像默认的是arm(虽然我网上查的说默认是thumb,但我的库编译出来的是arm,不知为何),下面的图假设我自己的函数库是arm指令的。
另外,inline hook中最麻烦的部分应该是指令修正, 指令中有PC寄存器相对偏移的指令,这种情况需要指令修正情况,Arm指令模式下的指令修正相对简单,Thumb指令模式下很麻烦,这里暂时不介绍。
一. ARM指令
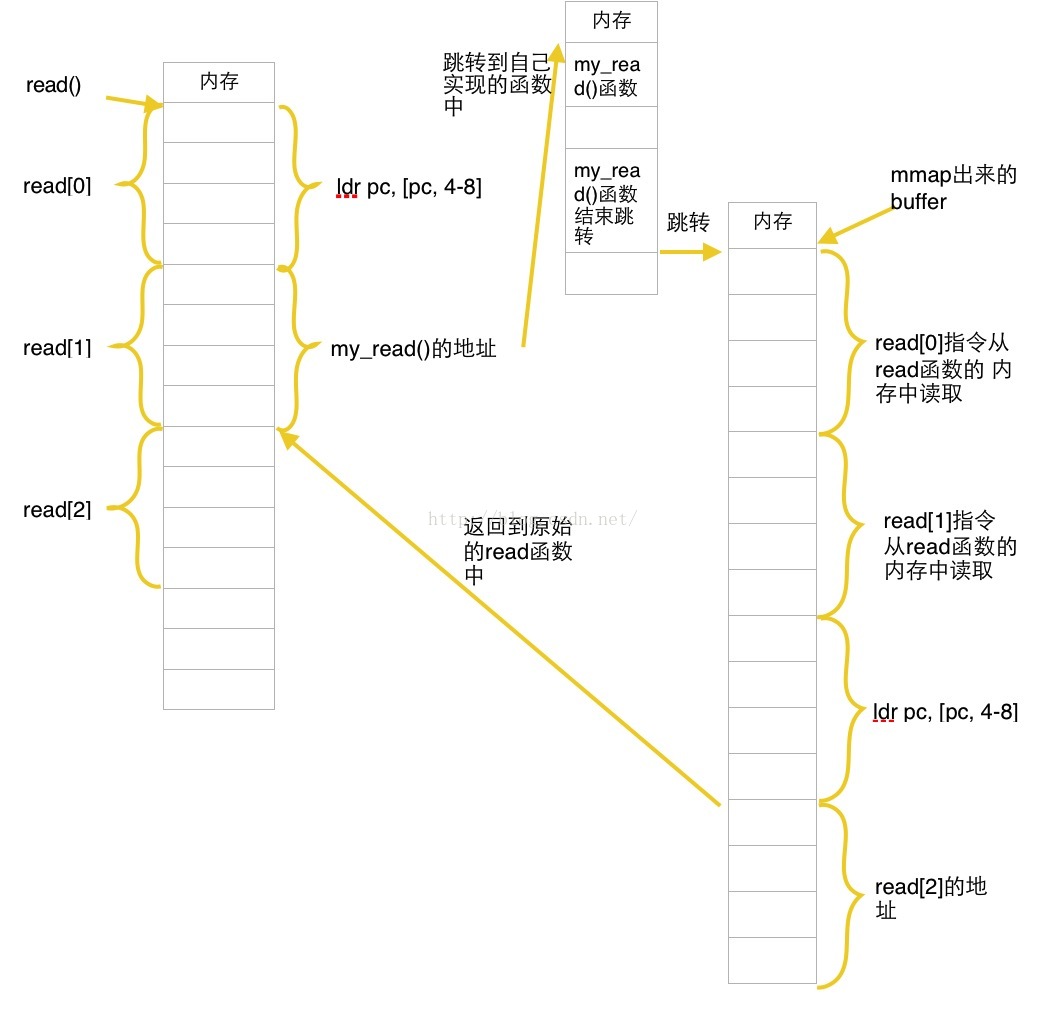
图1 目标函数是Arm指令下的Inline hook原理图
ARM指令模式下的指令修正相对来说比较简单点,我在网上查了一下主要涉及LDR/STR,ADD,以及B系列的指令,这些指令可能会以pc寄存器作为Rn寄存器,然后加上一个偏移量得到的值作为操作数。因为在hook的时候指令搬迁到另外一块buffer中,所以pc的值肯定改变了,这时候就需要指令修正。下面就
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









