









本篇文章介绍一个在游戏中的重要概念,在MVP矩阵中,视图矩阵和投影矩阵都和摄像机有关,说句白话,摄像机其实就是生成投影矩阵和视图矩阵的方式和原因,cocos2d-x中使用GamePlay3D类的Mat4类生成各种矩阵,一下就通过分析摄像机Camera类的代码来看这些矩阵是如何生成的。
首先来看正交矩阵的初始化代码:
bool Camera::initOrthographic(float zoomX, float zoomY, float nearPlane, float farPlane)
{
_zoom[0] = zoomX;
_zoom[1] = zoomY;
_nearPlane = nearPlane;
_farPlane = farPlane;
Mat4::createOrthographicOffCenter(0, _zoom[0], 0, _zoom[1], _nearPlane, _farPlane, &_projection);
_viewProjectionDirty = true;
_frustumDirty = true;
return true;
}createOrthographicOffCenter生成投影矩阵把它传给_projection。
bool Camera::initPerspective(float fieldOfView, float aspectRatio, float nearPlane, float farPlane)
{
_fieldOfView = fieldOfView;
_aspectRatio = aspectRatio;
_nearPlane = nearPlane;
_farPlane = farPlane;
Mat4::createPerspective(_fieldOfView, _aspectRatio, _nearPlane, _farPlane, &_projection);
_viewProjectionDirty = true;
_frustumDirty = true;
return true;
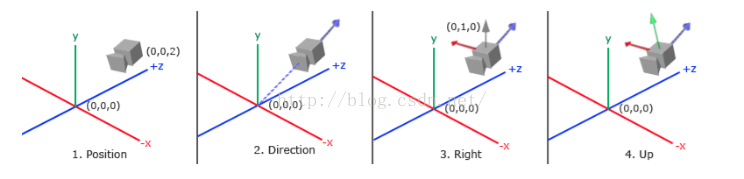
}定义一个摄像机,需要摄像机位置,观察方向,还有一个指向它右侧的向量,以及一个它上方的向量,这实际上是一个以摄像机位置为原点的坐标系,如图所示:
所以说在创建摄像机以后,就要定义它的位置和lookAt
_camera->setPosition3D(Vec3(0, 130, 130) + _sprite3D->getPosition3D());
_camera->lookAt(_sprite3D->getPosition3D());在lookAt中,我们定义了lookAt矩阵,也就是视图矩阵,至于视图矩阵的推导,可以参考这篇文章:http://www.cnblogs.com/mincomp/archive/2012/09/06/2672888.html,这里我们只需要知道这个结果就可以:

R为右向量,U为上向量,D为方向向量,它们的计算过程就在lookAt函数中:
//向上向量
Vec3 upv = up;
upv.normalize();
//摄像机方向
Vec3 zaxis;
Vec3::subtract(this->getPosition3D(), lookAtPos, &zaxis);
zaxis.normalize();
//右轴
Vec3 xaxis;
Vec3::cross(upv, zaxis, &xaxis);
xaxis.normalize();
//上轴
Vec3 yaxis;
Vec3::cross(zaxis, xaxis, &yaxis);
yaxis.normalize();
//lookAt矩阵
Mat4 rotation;
rotation.m[0] = xaxis.x;
rotation.m[1] = xaxis.y;
rotation.m[2] = xaxis.z;
rotation.m[3] = 0;
rotation.m[4] = yaxis.x;
rotation.m[5] = yaxis.y;
rotation.m[6] = yaxis.z;
rotation.m[7] = 0;
rotation.m[8] = zaxis.x;
rotation.m[9] = zaxis.y;
rotation.m[10] = zaxis.z;
rotation.m[11] = 0;
下一篇将介绍天空盒的原理
能力不足,水平有限,如有问题,欢迎指出。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









