





 本文探讨了SharePoint开发中使用SPD工具的效率提升,SPD从早期Web开发工具发展而来,用于创建和编辑站点、页面、列表等内容,支持基于规则的工作流设计,并可与Visual Studio无缝集成进行进一步定制。
本文探讨了SharePoint开发中使用SPD工具的效率提升,SPD从早期Web开发工具发展而来,用于创建和编辑站点、页面、列表等内容,支持基于规则的工作流设计,并可与Visual Studio无缝集成进行进一步定制。
BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第3章节--SharePoint 2013 开发人员工具 用SPD开发SharePoint应用程序
很多开发人员说他们宁愿不用SPD作为开发SharePoint的工具。然而,如果你没有在工具集中包括它你可能进度放缓。因为你将发现SPD可以让一些开发任务变得更容易。
SPD从FrontPage(早起Web开发人员工具)进化而来到SPD(以SharePoint为中心的设计人员工具,随SharePoint 2010一起出现)。SPD可以用以多种设计功能,包括创建和编辑站点、页面、列表和内容类型。并且SPD可以用来创建基于规则的声明的工作流,然后可以导入到VS进一步自定义。
第一次打开SPD时,需要提供站点URL和用户账户及密码,否则你什么也不能做。SPD继承了标准SharePoint权限。
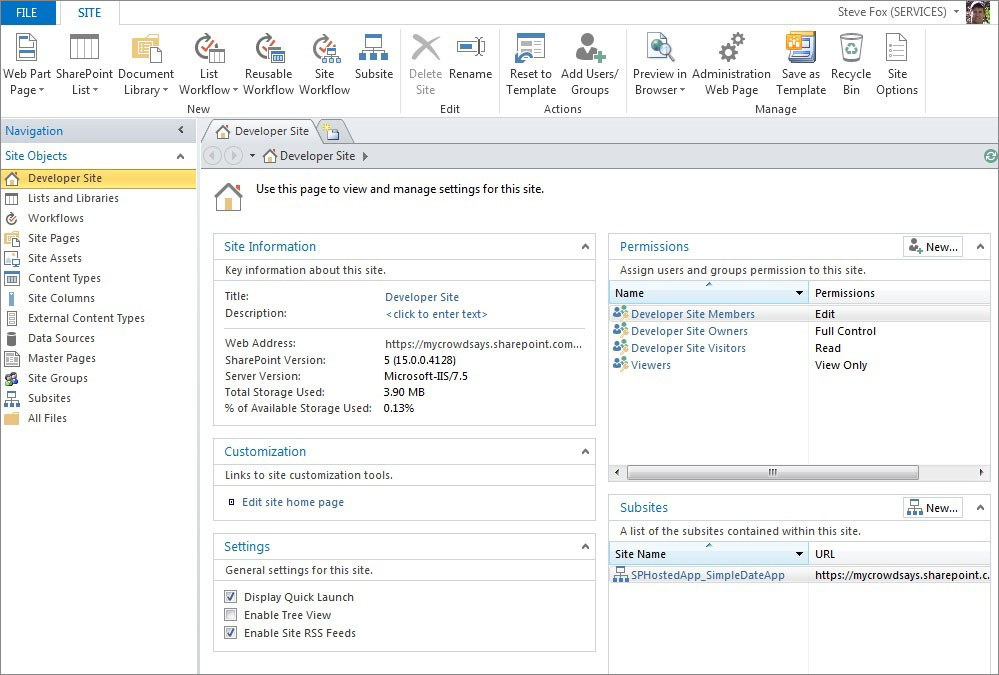
你在SPD中打开站点后,许多导航选项和关于站点的信息出现,如站点元数据、权限、子站点等等,如下图:
SPD从FrontPage(早起Web开发人员工具)进化而来到SPD(以SharePoint为中心的设计人员工具,随SharePoint 2010一起出现)。SPD可以用以多种设计功能,包括创建和编辑站点、页面、列表和内容类型。并且SPD可以用来创建基于规则的声明的工作流,然后可以导入到VS进一步自定义。
第一次打开SPD时,需要提供站点URL和用户账户及密码,否则你什么也不能做。SPD继承了标准SharePoint权限。
你在SPD中打开站点后,许多导航选项和关于站点的信息出现,如站点元数据、权限、子站点等等,如下图:

















 148
148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









