







你好!这里是风筝的博客,
欢迎和我一起交流。
了解i2c框架时,在别的博客看到一张图,非常好,引用如下:
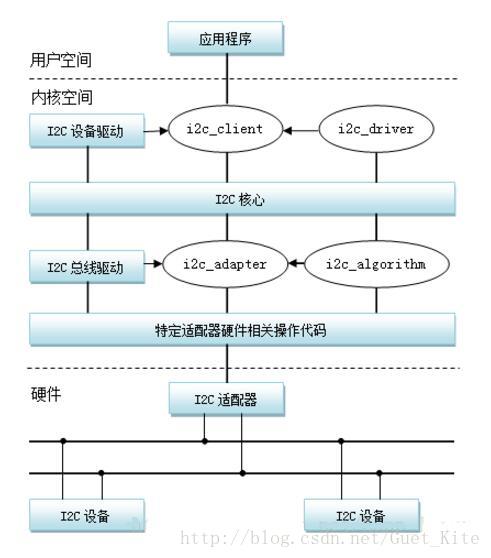
其中,i2c_client是具体的设备实例,是通过i2c总线连接到i2c_adapter的。无论是什么i2c设备,都可以通过i2c_adapter来访问i2c总线,i2c_adapter屏蔽了底层i2c总线控制时序,向上层提供一个统一的接口。
以kernel4.8.17为例:
在mach-smdk2440.c文件,
static struct platform_device *smdk2440_devices[] __initdata = {
&s3c_device_ohci,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
&smdk2440_device_eth,
};
static void __init smdk2440_map_io(void)
{
s3c24xx_init_io(smdk2440_iodesc, ARRAY_SIZE(smdk2440_iodesc));
s3c24xx_init_uarts(smdk2440_uartcfgs, ARRAY_SIZE(smdk2440_uartcfgs));
samsung_set_timer_source(SAMSUNG_PWM3, SAMSUNG_PWM4);
}
static void __init smdk2440_machine_init(void)
{
s3c24xx_fb_set_platdata(&smdk2440_fb_info);
s3c_i2c0_set_platdata(NULL);
platform_add_devices(smdk2440_devices, ARRAY_SIZE(smdk2440_devices));
smdk_machine_init();
}在smdk2440_map_io函数里,调用s3c24xx_init_io函数:
void __init s3c24xx_init_io(struct map_desc *mach_desc, int size)
{
arm_pm_idle = s3c24xx_default_idle;
/* initialise the io descriptors we need for initialisation */
iotable_init(mach_desc, size);
iotable_init(s3c_iodesc, ARRAY_SIZE(s3c_iodesc));
if (cpu_architecture() >= CPU_ARCH_ARMv5) {
samsung_cpu_id = s3c24xx_read_idcode_v5();
} else {
samsung_cpu_id = s3c24xx_read_idcode_v4();
}
s3c_init_cpu(samsung_cpu_id, cpu_ids, ARRAY_SIZE(cpu_ids));
samsung_pwm_set_platdata(&s3c24xx_pwm_variant);
}其中有s3c_init_cpu(samsung_cpu_id, cpu_ids, ARRAY_SIZE(cpu_ids)),
参数cpu_ids是:
static struct cpu_table cpu_ids[] __initdata = {
/*太多了,省略......*/
{
.idcode = 0x32440000,
.idmask = 0xffffffff,
.map_io = s3c2440_map_io,
.init_uarts = s3c244x_init_uarts,
.init = s3c2440_init,
.name = name_s3c2440
},
/*太多了,省略......*/继续跟踪s3c_init_cpu函数:
void __init s3c_init_cpu(unsigned long idcode,
struct cpu_table *cputab, unsigned int cputab_size)
{
cpu = s3c_lookup_cpu(idcode, cputab, cputab_size);
if (cpu == NULL) {
printk(KERN_ERR "Unknown CPU type 0x%08lx\n", idcode);
panic("Unknown S3C24XX CPU");
}
printk("CPU %s (id 0x%08lx)\n", cpu->name, idcode);
if (cpu->init == NULL) {
printk(KERN_ERR "CPU %s support not enabled\n", cpu->name);
panic("Unsupported Samsung CPU");
}
if (cpu->map_io)
cpu->map_io();
}就是最后一行,会调用map_io函数,即前面的s3c2440_map_io函数:
void __init s3c2440_map_io(void)
{
s3c244x_map_io();
s3c24xx_gpiocfg_default.set_pull = s3c24xx_gpio_setpull_1up;
s3c24xx_gpiocfg_default.get_pull = s3c24xx_gpio_getpull_1up;
}进入s3c244x_map_io函数:
void __init s3c244x_map_io(void)
{
/* register our io-tables */
iotable_init(s3c244x_iodesc, ARRAY_SIZE(s3c244x_iodesc));
/* rename any peripherals used differing from the s3c2410 */
s3c_device_sdi.name = "s3c2440-sdi";
s3c_device_i2c0.name = "s3c2440-i2c";
s3c_nand_setname("s3c2440-nand");
s3c_device_ts.name = "s3c2440-ts";
s3c_device_usbgadget.name = "s3c2440-usbgadget";
s3c2410_device_dclk.name = "s3c2440-dclk";
}这里,即是把s3c_device_i2c0结构体的名字改为了”s3c2440-i2c” !!!
好了,回到文章最开头的mach-smdk2440.c文件,看下smdk2440_machine_init函数,
里面会通过s3c_i2c0_set_platdata函数,设置default_i2c_data结构体的bus_num为0,以及设置i2c的IO口:npd->cfg_gpio = s3c_i2c0_cfg_gpio;
接着就会调用platform_add_devices(smdk2440_devices, ARRAY_SIZE(smdk2440_devices));在platform平台下进行设备注册,设备名字为”s3c2440-i2c”
有了platform-device,自然有driver!
在i2c-s3c2410.c文件:
static const struct platform_device_id s3c24xx_driver_ids[] = {
{
.name = "s3c2410-i2c",
.driver_data = 0,
}, {
.name = "s3c2440-i2c",
.driver_data = QUIRK_S3C2440,
}, {
.name = "s3c2440-hdmiphy-i2c",
.driver_data = QUIRK_S3C2440 | QUIRK_HDMIPHY | QUIRK_NO_GPIO,
}, { },
};
static struct platform_driver s3c24xx_i2c_driver = {
.probe = s3c24xx_i2c_probe,
.remove = s3c24xx_i2c_remove,
.id_table = s3c24xx_driver_ids,
.driver = {
.name = "s3c-i2c",
.pm = S3C24XX_DEV_PM_OPS,
.of_match_table = of_match_ptr(s3c24xx_i2c_match),
},
};
static int __init i2c_adap_s3c_init(void)
{
return platform_driver_register(&s3c24xx_i2c_driver);
}可以看到,s3c24xx_driver_ids里是有”s3c2440-i2c”的,所以能和之前的device匹配成功,调用probe函数:
static int s3c24xx_i2c_probe(struct platform_device *pdev)
{
/*太长了,部分省略......*/
strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE;
i2c->adap.algo = &s3c24xx_i2c_algorithm;
i2c->adap.retries = 2;
i2c->adap.class = I2C_CLASS_DEPRECATED;
i2c->tx_setup = 50;
/* setup info block for the i2c core */
i2c->adap.algo_data = i2c;
i2c->adap.dev.parent = &pdev->dev;
i2c->pctrl = devm_pinctrl_get_select_default(i2c->dev);
i2c->adap.nr = i2c->pdata->bus_num;
i2c->adap.dev.of_node = pdev->dev.of_node;
platform_set_drvdata(pdev, i2c);
pm_runtime_enable(&pdev->dev);
ret = i2c_add_numbered_adapter(&i2c->adap);
}这里主要注意两个地方:
一是:i2c->adap.algo = &s3c24xx_i2c_algorithm;
这里的s3c24xx_i2c_algorithm是:
/* i2c bus registration info */
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};还记得文章开始的那张图吗?
i2c_adapter和i2c_algorithm 都是操作i2c bus的结构体,前者定义一个i2c模块,后者定义操作模块的方法。(或者理解为:i2c_adapter对应于物理上的一个适配器,而i2c_algorithm对应一套通信方法。)
这里就是i2c_algorithm!!
i2c的底层实现函数,进行封装好,
.master_xfer 用于i2c总线传输,传递给它的i2c_msg数组中每个I2C消息。
.functionality 用于返回algorithm所支持的通信协议,如I2C_FUNC_I2C、I2C_FUNC_10BIT_ADDR、I2C_FUNC_SMBUS_READ_BYTE、I2C_FUNC_SUMBUS_WRITE_BYTE等。
二是:ret = i2c_add_numbered_adapter(&i2c->adap);
这就是i2c_adapter了,进去看下函数实现:
int i2c_add_numbered_adapter(struct i2c_adapter *adap)
{
if (adap->nr == -1) /* -1 means dynamically assign bus id */
return i2c_add_adapter(adap);
return __i2c_add_numbered_adapter(adap);
}static int __i2c_add_numbered_adapter(struct i2c_adapter *adap)
{
int id;
mutex_lock(&core_lock);
id = idr_alloc(&i2c_adapter_idr, adap, adap->nr, adap->nr + 1, GFP_KERNEL);
mutex_unlock(&core_lock);
if (WARN(id < 0, "couldn't get idr"))
return id == -ENOSPC ? -EBUSY : id;
return i2c_register_adapter(adap);
}即最后调用i2c_register_adapter(adap)函数,在i2c_bus总线上注册,名字为:
dev_set_name(&adap->dev, “i2c-%d”, adap->nr);
这里说下i2c_adapter与i2c_client的关系:i2c_client依附于i2c_adapter,由于一个适配器上可以连接多个I2C设备,所以一个i2c_adapter也可以被多个i2c_client依附,i2c_adapter中包含依附于它的i2c_client的链表。
.
好咯,i2c框架差不多就是这样咯,我们以一个kernel里的例子来看下:
at24.c函数:
static struct i2c_driver at24_driver = {
.driver = {
.name = "at24",
.acpi_match_table = ACPI_PTR(at24_acpi_ids),
},
.probe = at24_probe,
.remove = at24_remove,
.id_table = at24_ids,
};
static int __init at24_init(void)
{
if (!io_limit) {
pr_err("at24: io_limit must not be 0!\n");
return -EINVAL;
}
io_limit = rounddown_pow_of_two(io_limit);
return i2c_add_driver(&at24_driver);
}这里调用i2c_add_driver函数在i2c_bus总线下注册,然后看下他的读写函数,以读函数为例:
static ssize_t at24_eeprom_read_i2c(struct at24_data *at24, char *buf,
unsigned int offset, size_t count)
{
unsigned long timeout, read_time;
struct i2c_client *client;
struct i2c_msg msg[2];
int status, i;
u8 msgbuf[2];
memset(msg, 0, sizeof(msg));
client = at24_translate_offset(at24, &offset);
if (count > io_limit)
count = io_limit;
i = 0;
if (at24->chip.flags & AT24_FLAG_ADDR16)
msgbuf[i++] = offset >> 8;
msgbuf[i++] = offset;
msg[0].addr = client->addr;
msg[0].buf = msgbuf;
msg[0].len = i;
msg[1].addr = client->addr;
msg[1].flags = I2C_M_RD;
msg[1].buf = buf;
msg[1].len = count;
loop_until_timeout(timeout, read_time) {
status = i2c_transfer(client->adapter, msg, 2);
if (status == 2)
status = count;
dev_dbg(&client->dev, "read %zu@%d --> %d (%ld)\n",
count, offset, status, jiffies);
if (status == count)
return count;
}
return -ETIMEDOUT;
}里面就是会调用到i2c_transfer函数了,函数里面以i2c_msg(即I2C消息)为单位通信,i2c_transfer函数里又会调用到__i2c_transfer函数:
int __i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
{
unsigned long orig_jiffies;
int ret, try;
if (adap->quirks && i2c_check_for_quirks(adap, msgs, num))
return -EOPNOTSUPP;
if (static_key_false(&i2c_trace_msg)) {
int i;
for (i = 0; i < num; i++)
if (msgs[i].flags & I2C_M_RD)
trace_i2c_read(adap, &msgs[i], i);
else
trace_i2c_write(adap, &msgs[i], i);
}
/* Retry automatically on arbitration loss */
orig_jiffies = jiffies;
for (ret = 0, try = 0; try <= adap->retries; try++) {
ret = adap->algo->master_xfer(adap, msgs, num);
if (ret != -EAGAIN)
break;
if (time_after(jiffies, orig_jiffies + adap->timeout))
break;
}
if (static_key_false(&i2c_trace_msg)) {
int i;
for (i = 0; i < ret; i++)
if (msgs[i].flags & I2C_M_RD)
trace_i2c_reply(adap, &msgs[i], i);
trace_i2c_result(adap, i, ret);
}
return ret;
}就是这里,里面实现:ret = adap->algo->master_xfer(adap, msgs, num);
这就是之前说的i2c_algorithm 里实现的.master_xfer函数里,实现i2c总线传输函数。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









