






没有仔细研究过,就用了下,总结了点,也搜了点资料.
----------------------------------------------------------------------------------------------------------------------------
简单的讲:(UART与COM)
嵌入式里面说的串口,一般是指UART口, 但是我们经常搞不清楚它和COM口的区别, 以及RS232, TTL等关系, 实际上UART,COM指的物理接口形式(硬件), 而TTL、RS-232是指的电平标准(电信号).
UART有4个pin(VCC, GND, RX, TX), 用的TTL电平, 低电平为0(0V),高电平为1(3.3V或以上)。

COM口是我们台式机上面常用的口(下图),9个pin, 用的RS232电平, 它是负逻辑电平,它定义+5~+12V为低电平,而-12~-5V为高电平

详细的说:
UART的特征
一般uart控制器在嵌入式系统里面都做在cpu一起,像飞思卡尔的IMX6芯片就是这样,有多个uart控制器。
引脚介绍(COM口比较多pin,但是常用的也是这几个):
VCC:供电pin,一般是3.3v,在我们的板子上没有过电保护,这个pin一般不接更安全
GND:接地pin,有的时候rx接受数据有问题,就要接上这个pin,一般也可不接
RX:接收数据pin
TX:发送数据pin,我之前碰到串口只能收数据,不能发数据问题,经baidu,原来是设置了流控制,取消就可以了,适用于putty,SecureCRT
在调试的时候, 多数情况下我们只引出rx,tx即可. 比如调试gps模块, IC数据直接通过uart上报,我就直接用了两个线连出了rx,tx,连上串口转USB小板, 电脑从串口直接获取数据,这样跳过了开发板,测试了gps的数据有没有问题.
使用方法:
我们常用UART口进行调试,但是UART的数据要传到电脑上分析就要匹配电脑的接口,通常我们电脑使用接口有COM口和USB口(最终在电脑上是一个虚拟的COM口),但是要想连上这两种接口都要需要进行硬件接口转换和电平转换。
如果连接电脑COM口, 需要一个类似下图的转换小板, 它实现了TTL电平和RS232电平互转, 我之前使用过, 但是现在很少用了。

如果要连接USB接口, 需要类似下面的小板, 它实现了TTL电平和USB电平的转换, 这种使用的较多。
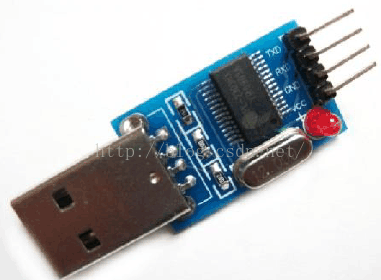
电路图和连接如下, 通常上面有个专门转换芯片。

总结
1、串口、COM口是指的物理接口形式(硬件)。而TTL、RS-232、RS-485是指的电平标准(电信号)。
2、接设备的时候,一般只接GND RX TX。不会接Vcc或者+3.3v的电源线,避免与目标设备上的供电冲突。
3、PL2303、CP2102芯片是 USB 转 TTL串口 的芯片,用USB来扩展串口(TTL电平)
4、MAX232芯片是 TTL电平与RS232电平的专用双向转换芯片,可以TTL转RS-232,也可以RS-232转TTL。
5、TTL标准是低电平为0,高电平为1(+5V电平)。RS-232标准是正电平为0,负电平为1(±15V电平)。
6、RS-485与RS-232类似,但是采用差分信号负逻辑。这里略过不讲。
百度上这个文章总结的不错:
其他
串口进行通信的方式有两种:同步通信方式和异步通信方式
SPI(Serial Peripheral Interface:串行外设接口);
I2C(INTER IC BUS:意为IC之间总线),一(host)对多,以字节为单位发送。
UART(Universal Asynchronous Receiver Transmitter:通用异步收发器), 一对一,以位为单位发送。














 15万+
15万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









