









 本文详细介绍了STM32上uCOS-II的移植步骤,包括配置文件的修改、关键函数的实现等内容,帮助读者快速掌握uCOS-II在STM32上的移植方法。
本文详细介绍了STM32上uCOS-II的移植步骤,包括配置文件的修改、关键函数的实现等内容,帮助读者快速掌握uCOS-II在STM32上的移植方法。
很久很久都没有写博客了,最近真是比赛一个接着一个,都需要参加,所以stm32的学习一直停滞不前,趁着最近准备模块的时间开始着手ucosII的学习,
没办法呀,学习还是要继续的。。
现在开始正式学习,今天的要求不高,只是分析一下移植的时候需要注意的问题,暂且不研究内核代码!(代码移植参照着ST官方源代码)
也就是资源里面名为 取AN-1018.pdf的文档。
代码这里可以下载http://download.csdn.net/detail/king_bingge/5353528
一、uc/OS的实时性是靠什么实现的?
1、uC/OS的实时性就是靠定时中断来完成。
2、每个时钟节拍到来,就会产生一次定时中断,中断后进行任务调度,运行就绪表中优先级最高的任务(非抢先型内核中断后继续运行被中断任务)。
即过一段时间就检测是否有重要任务需要运行,是的就转而运行更重要的任务,从而确保实时性(裸机程序就无法这样做了)。
当然这里没有把系统调用考虑进去。
二、首先整体把握一下在M3上运行ucosII的架构
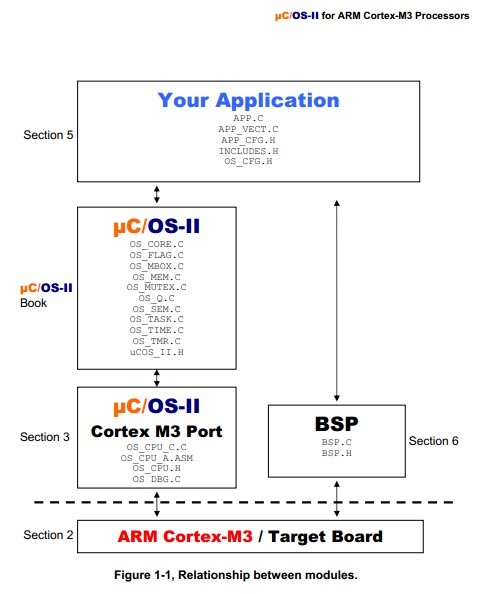
这就是整个系统各模块之间的关系,好的接下来就按照手册来分析一下移植的时候需要注意的地方
1、关于OS_CPU.h文件
#ifndef OS_CPU_H
#define OS_CPU_H
#ifdef OS_CPU_GLOBALS
#define OS_CPU_EXT
#else
#define OS_CPU_EXT extern
#endif
一个全局变量的声明问题
2、类型定义
typedef unsigned char BOOLEAN;
typedef unsigned char INT8U; /* Unsigned 8 bit quantity */
typedef signed char INT8S; /* Signed 8 bit quantity */
typedef unsigned short INT16U; /* Unsigned 16 bit quantity */
typedef signed short INT16S; /* Signed 16 bit quantity */
typedef unsigned int INT32U; /* Unsigned 32 bit quantity */
typedef signed int INT32S; /* Signed 32 bit quantity */
typedef float FP32; /* Single precision floating point */
typedef double FP64; /* Double precision floating point */
typedef unsigned int OS_STK; /* Each stack entry is 32-bit wide */
typedef unsigned int OS_CPU_SR; /* Define size of CPU status register (PSR = 32 bits) */3、接下来是两个比较重要的函数,在汇编代码里面
#define OS_ENTER_CRITICAL() {cpu_sr = OS_CPU_SR_Save();}
#define OS_EXIT_CRITICAL() {OS_CPU_SR_Restore(cpu_sr);}所谓临界区:是指一些不能被中断的代码。哪些代码是不能中断的呢,比如我们模拟的入栈操作,再比如当我们在执行系统调用的时候。那么类似于这钟代码就是临界区,而上面这两个宏的作用就是当某些代码为临界代码的时候,那么我们就在开始这段代码的时候加上ENTER宏,在退出这段代码的时候就加上EXIT宏。
4、接下来继续看看这两个宏做了什么事情吧
跟踪进去可以发现
OS_CPU_SR_Save
MRS R0, PRIMASK ; Set prio int mask to mask all (except faults)
CPSID I
BX LR
OS_CPU_SR_Restore
MSR PRIMASK, R0
BX LR就是我们上一步所说的打开和屏蔽中断,注意了,根据ATCPS规则(不知道的可以百度),C和汇编进行混合调用的时候,R0传递着第一个参数,并且R0还是传递返回值的。
5、接下来就是栈的增长方向,在我们的stm32板子上面,栈是向下增长的,堆是向上增长的
#define OS_STK_GROWTH 1 /* Stack grows from HIGH to LOW memory on ARM */
#define OS_TASK_SW() OSCtxSw()第二个宏定义是任务切换的宏,下面会提到
6、下面涉及到得就是这个文件里面需要修改的代码,首先看源代码,这是函数原型声明
/*
*********************************************************************************************************
* PROTOTYPES
*********************************************************************************************************
*/
#if OS_CRITICAL_METHOD == 3 /* See OS_CPU_A.ASM */
OS_CPU_SR OS_CPU_SR_Save(void);
void OS_CPU_SR_Restore(OS_CPU_SR cpu_sr);
#endif
void OSCtxSw(void);
void OSIntCtxSw(void);
void OSStartHighRdy(void);
void OS_CPU_PendSVHandler(void);
/* See OS_CPU_C.C */
void OS_CPU_SysTickHandler(void);
void OS_CPU_SysTickInit(void);
/* See BSP.C */
INT32U OS_CPU_SysTickClkFreq(void);我们需要做的就是把这个三个函数注释掉,因为这是我们自己实现的
/* See OS_CPU_C.C */
// void OS_CPU_SysTickHandler(void);
// void OS_CPU_SysTickInit(void);
// /* See BSP.C */
// INT32U OS_CPU_SysTickClkFreq(void);三、关于os_cfg.h文件
1、这里都是一些配置,根据我们需要实现的功能来配置我们的OS,当然,如果只是为了点灯,那么我们可以这样做
#define OS_FLAG_EN 0 //禁用信号量集
#define OS_MBOX_EN 0 //禁用邮箱
#define OS_MEM_EN 0 //禁用内存管理
#define OS_MUTEX_EN 0 //禁用互斥信号量
#define OS_Q_EN 0 //禁用队列
#define OS_SEM_EN 0 //禁用信号量
#define OS_TMR_EN 0 //禁用定时器
#define OS_DEBUG_EN 0 //禁用调试
#define OS_APP_HOOKS_EN 0 336. #define OS_FLAG_EN 0 //禁用信号量集
#define OS_MBOX_EN 0 //禁用邮箱
#define OS_MEM_EN 0 //禁用内存管理
#define OS_MUTEX_EN 0 //禁用互斥信号量
#define OS_Q_EN 0 //禁用队列
#define OS_SEM_EN 0 //禁用信号量
#define OS_TMR_EN 0 //禁用定时器
#define OS_DEBUG_EN 0 //禁用调试
#define OS_APP_HOOKS_EN 0 //hook函数也可以注释掉
#define OS_EVENT_MULTI_EN 0 //多重事件函数也是一样
#define OS_EVENT_MULTI_EN 0 那么,到这里,这个文件中需要修改的内容就是这么多了。
四、关于os_cpu_c.c文件。
这个文件是对应于之前的宏开关来说的,我们要把之前三个函数相关的宏开关以及函数的定义注释掉,具体操作如下
// #define OS_CPU_CM3_NVIC_ST_CTRL (*((volatile INT32U *)0xE000E010)) /* SysTick Ctrl & Status Reg. */
// #define OS_CPU_CM3_NVIC_ST_RELOAD (*((volatile INT32U *)0xE000E014)) /* SysTick Reload Value Reg. */
// #define OS_CPU_CM3_NVIC_ST_CURRENT (*((volatile INT32U *)0xE000E018)) /* SysTick Current Value Reg. */
// #define OS_CPU_CM3_NVIC_ST_CAL (*((volatile INT32U *)0xE000E01C)) /* SysTick Cal Value Reg. */
// #define OS_CPU_CM3_NVIC_PRIO_ST (*((volatile INT8U *)0xE000ED23)) /* SysTick Handler Prio Reg. */
// #define OS_CPU_CM3_NVIC_ST_CTRL_COUNT 0x00010000 /* Count flag. */
// #define OS_CPU_CM3_NVIC_ST_CTRL_CLK_SRC 0x00000004 /* Clock Source. */
// #define OS_CPU_CM3_NVIC_ST_CTRL_INTEN 0x00000002 /* Interrupt enable. */
// #define OS_CPU_CM3_NVIC_ST_CTRL_ENABLE 0x00000001 /* Counter mode. */
// #define OS_CPU_CM3_NVIC_PRIO_MIN 0xFF /* Min handler prio. */对应的还有这个函数也需要注释掉
//void OS_CPU_SysTickInit (void)
//{
// INT32U cnts;
//
//
// cnts = OS_CPU_SysTickClkFreq() / OS_TICKS_PER_SEC;
//
// OS_CPU_CM3_NVIC_ST_RELOAD = (cnts - 1);
// /* Set prio of SysTick handler to min prio. */
// OS_CPU_CM3_NVIC_PRIO_ST = OS_CPU_CM3_NVIC_PRIO_MIN;
// /* Enable timer. */
// OS_CPU_CM3_NVIC_ST_CTRL |= OS_CPU_CM3_NVIC_ST_CTRL_CLK_SRC | OS_CPU_CM3_NVIC_ST_CTRL_ENABLE;
// /* Enable timer interrupt. */
// OS_CPU_CM3_NVIC_ST_CTRL |= OS_CPU_CM3_NVIC_ST_CTRL_INTEN;
/那么这样,这个文件也解决掉了。继续下一个
五、在OS_dbg.c这个文件中
修改一个地方,#define OS_COMPILER_OPT __root,将后面的__root注释掉,否则会报错。自己可以试试
六、来到OS_cpu_a.asm这个汇编文件
1、里面的PUBLIC全改为EXPORT。这是有ARM汇编语言语言规定的。
2、RSEG CODE:CODE:NOROOT(2) 开辟代码段的格式也是需要修改的
修改如下:
AREA |.text|, CODE , READONLY, ALIGN = 2
THUMB
REQUIRE8
PRESERVE8到这里,这个文件也修改完毕。
七、关于启动文件
有一个地方需要修改,那就是中断这部分。把启动代码中所有出现PendSV_Handler的地方替换成OS_CPU_PendSVHandler即可。
那么这个文件也修改完毕
到这里,我们的移植也就完成了一大部分,接下来就是编写自己的代码了。
八、编写几个简单的函数就能实现点灯了
#include "includes.h"
static OS_STK startup_task_stk[STARTUP_TASK_STK_SIZE]; //定义栈
int main(void)
{
BSP_Init();
OSInit();
OSTaskCreate(Task_LED,(void *)0,
&startup_task_stk[STARTUP_TASK_STK_SIZE-1], STARTUP_TASK_PRIO);
OSStart();
return 0;
}
/*
* 函数名:BSP_Init
* 描述 :时钟初始化、硬件初始化
* 输入 :无
* 输出 :无
*/
void BSP_Init(void)
{
LED_GPIO_Config(); /* LED 端口初始化 */
}
void Task_LED(void *p_arg)
{
(void)p_arg; // 'p_arg' 并没有用到,防止编译器提示警告
SysTick_init();
while (1)
{
LED1( ON );
OSTimeDlyHMSM(0, 0,0,500);
LED1( OFF);
OSTimeDlyHMSM(0, 0,0,500);
}
}
/*
* 函数名:SysTick_init
* 描述 :配置SysTick定时器
* 输入 :无
* 输出 :无
*/
void SysTick_init(void)
{
SysTick_Config(SystemCoreClock /OS_TICKS_PER_SEC);//初始化并使能SysTick定时器
}
















 833
833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









