







首先介绍下什么是凸包问题?如下图:
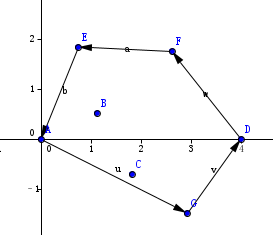
在一个二维坐标系,有若干点杂乱排列着,将最外层的点连接起来构成的凸多边型,它能包含给定的所有的点,这个多边形就是凸包。
寻找凸包的算法有很多种,Graham Scan算法是一种十分简单高效的二维凸包算法,能够在O(nlogn)的时间内找到凸包。
在讲解之前,读者需要了解向量叉积正负的几何意义,如不了解,可以参考http://blog.csdn.net/laojiu_/article/details/52078675
Graham Scan算法的做法是先定下一个起点,一般是最左边的点和最右边的点,然后一个个点扫过去,如果新加入的点和之前已经找到的点所构成的“壳”凸性没有变化,就继续扫,否则就把已经找到的最后一个点删去,再比较凸性,直到凸性不发生变化。分别扫描上下两个“壳”,合并在一起,凸包就找到了。这么说很抽象,我们看图来解释:
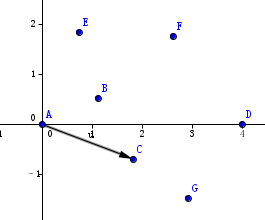
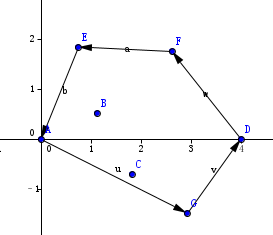
我们找下“壳”,上下其实是一样的。首先加入两个点A和C:
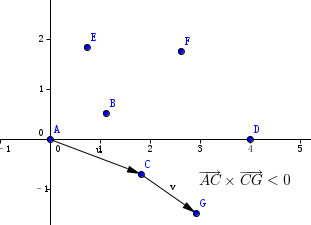
然后插入第三个点G,并计算AC×CG的叉积,却发现叉积小于0,也就是说逆时针方向上∠ACG大于180度,于是删去C点,加入G点:
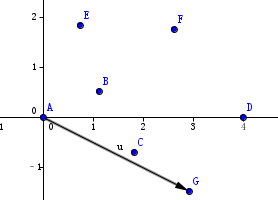
然后就是依照这个步骤便能加入D点。在AD上方是以D为起点。就能够找到AGD和DFEA两个凸壳。合并就得到了凸包。
关于扫描的顺序,有坐标序和极角序两种。坐标序是比较两个点的x坐标,如果小的先被扫描(扫描上凸壳的时候反过来);如果两个点x坐标相同,那么就比较y坐标,小的先被扫描(扫描上凸壳的时候也是反过来)。极角序使用arctan2函数的返回值进行比较,这个读者自己写吧。
下面贴下代码:
#define _CRT_SECURE_NO_DEPRECATE
#include<iostream>
#include<cmath>
#include<algorithm>
using namespace std;
struct Point
{
double x, y;
Point operator-(Point & p)
{
Point t;
t.x = x - p.x;
t.y = y - p.y;
return t;
}
double det(Point p)//向量叉积
{
return x*p.y - p.x*y;
}
double dist(Point & p)//两点距离公式
{
return sqrt((x - p.x)*(x - p.x) + (y - p.y)*(y - p.y));
}
};
bool cmp(Point & p1, Point & p2)
{
if (p1.x != p2.x)
return p1.x < p2.x;
return p1.y < p2.y;
}
Point point[1005];
int convex[1005];
int N;//坐标系的无序点的个数
int getConvexHull()
{
sort(point, point + N, cmp);
int temp;
int total = 0;
for (int i = 0; i < N; i++)//下凸包
{
while (total > 1 && (point[convex[total - 1]] - point[convex[total - 2]]).det(point[i] - point[convex[total - 1]]) <= 0)
total--;
convex[total++] = i;
}
temp = total;
for (int i = N - 2; i >= 0; i--)//上凸包
{
while (total > temp && (point[convex[total - 1]] - point[convex[total - 2]]).det(point[i] - point[convex[total - 1]]) <= 0)
total--;
convex[total++] = i;
}
return total;//返回组成凸包的点的个数,实际上多了一个,就是起点,所以组成凸包的点个数是total-1
}
int main()
{
return 0;
}
文章内容参考自: https://segmentfault.com/a/1190000000488339
返回目录---->数据结构与算法目录















 767
767

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









