







Navigation Mesh与Line-of-Sight Test
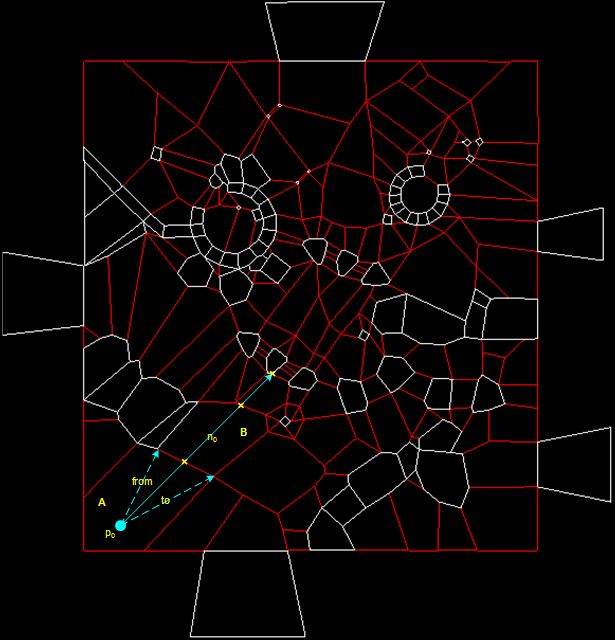
上图是一个由任意凸多边形构成的导航网格,白线包围区域代表着不可进入的障碍区域,红线包围区域则可以进入或穿越。网格中所有多边形的顶点存储次序均为顺时钟序。在下面的讨论中,我们的运算一概采用左手系进行。
假设当前所处的位置为p0,视线方向矢量为n0,p0位于多边形A中,我们知道每一条边的两侧的多边形的编号,现在的问题是:如果求得该视线途经了哪些多边形?与这些多边形的哪些边相交于何处(即Way point)?该视线终结于哪条边的何处?
首先让我们来解决一个子问题,即判断射线r与某凸多边形p之间的关系。不难想象,r只可能与p不相交、相交于1点或2点(只有穿出、或先射入后穿出)。这里我们最关心的是:(1) r究竟与p相交否?(2) 如果相交,那么r穿出p时,其交点在哪条边上?在哪里?
以A和射线r=(p0,n0)为例,先来判断A与r是否相交,这个太容易了,只需判断A有没有边与r相交即可。遍历A的每一条边e,然后得到每一条边的起点和终点(注意,时刻牢记顶点顺序是顺时钟的)。然后,分别获得起点矢量from和终点矢量to,然后计算test_a=from×n0和test_b=to×n0,再来检查test_a和test_b的Z分量符号:如果相同,则from、to均位于n0的同一侧,e与r不相交;如果test_a.Z>0且test_b.Z<0,则e为射线r在A中的穿出线;如果test_a.Z<0且test_b.Z>0,则要么e是射线的反方向与A的交线,要么e为射线在A中的射入边。这里,我们最关心的是有没有test_a.Z>0且test_b.Z<0的情况,即有没有穿出边。
如图,如果要对r进行LOS test,首先我们要判断一下p0处于哪个多边形,这个点与多边形关系的判断也很容易,这里,我们的p0位于A中。然后,在A中找射线r的穿出边和穿出点(求两射线的交点,trivial),判断穿出边的另一侧的多边形是否可以进入?如果是障碍或网格边缘,则LOS test中止,如果不是,则获得穿出边另一侧的多边形编号,这里是B,然后继续在B中找射线r的穿出边和穿出点,继续前面的一系列步骤,直到找出r的所有途经多边形、所有穿出边和穿出点为止。以上便是一次完整的视线检测过程。是不是足够简单?heh
如何判断点p0是否处于凸多边形内?
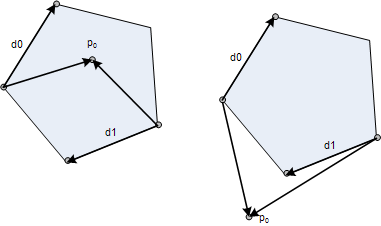
见上图,这里我们采用叉乘法,虽说只适用于凸多边形,不过计算最简便,不涉及三角运算(内角和法)和开方(面积法),什么水平垂直交叉线检测就直接免了吧,too ugly。假设多边形是顺时钟顶点序,我们采用的是左手系。遍历每条边,作一个边矢量e,从起点到终点;然后作测试矢量t,从边起点到要测试的点p0;计算test=e×t,如果test矢量的Z分量符号始终保持不变,则p0处于多边形内部;一旦其符号发生了改变(只需检测到一次符号改变即可),则p0处于多边形外部。
导航网格和LOS检测用来干什么的?
导航网格一般用来做层级式A*寻径,它可以很容易地推广到3D路径规划,与某些附加特性相配合,能够实现更多的特殊用途;LOS检测主要有两个用途:动态局部Point of View寻径和A*路径优化(平滑+Cutting the Corner)。














 3515
3515











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









