







图的简单总结
本文主要根据《数据结构(Java版)》(第3版) 叶核亚 简单总结得到
图
图的术语
线性表中的元素具有线性关系,每个元素只有一个直接前驱和一个直接后继。树形结构中的元素之间具有明显的层次关系,每个元素只有一个前驱和若干个后继,元素之间是非线性关系。图中元素之间具有多对多的非线性关系,图中每个元素可以有多个前驱和多个后继,任意两个元素都可以相邻,图结构比树和线性表更加复杂。
- 图是由顶点集合以及顶点间的关系集合组成的一种数据结构。顶点之间的关系称为边。一个图G记为 G=(V,E) ,V是顶点的有限集合,E是边的有限集合。
- 无向图中的边没有方向,每条边用两个顶点的无序对 (vi,vj) 表示
- 有向图中的边有方向,每条边用两个顶点的有序对 <vi,vj> <script type="math/tex" id="MathJax-Element-310"> </script>表示
- 简单图:在图中,如果不存在顶点到其自身的边,且同一条边在图中不重复出现,称为简单图。
- 完全图:图中的边数达到最大。无向图中每两个顶点之间都存在边,有n个顶点的无向完全图中有 n∗(n−1)/2 条边。有向图中,每两个顶点之间都存在方向相反的两条边,有n个顶点的有向完全图中有 n∗(n−1) 条边。
- 带权图:图中的边具有权值。在不同的应用中,权值有不同的含义。例如,如果顶点表示城市,两个顶点之间边的权值可以表示两个城市之间的距离。
- 子图:有两个图 G=(V,E) 和 G′=(V′,E′) ,如果 V′⊆V,E′⊆E ,则称 G′ 是 G 的子图。
- 邻接顶点:如果
(vi,vj) 是无向图中的一条边,则称 vi 和 vj 互为邻接顶点。如果 <vi,vj> <script type="math/tex" id="MathJax-Element-321"> </script>是有向图中的一条边,则称 vi 邻接到 vj - 顶点的度:与顶点 vi 关联的边数,记为 degree(vi) 。度为0的点称为孤点。度为1的点称为悬挂点。在无向图中,边数是各顶点度数和的一半。在有向图中,度=入度+出度, vi 的入度数是以 vi 为终点的边数,初度是以 vi 为起点的边数,图中总边数等于各顶点度数和。
- 路径:在图 G=(V,E) 中,如果存在顶点序列 (vi,vp1,vp2,...,vpm,vj) ,且边 (vi,vp1),(vp1,vp2),...,(vpm,vj) 都是图G的边,则称顶点序列 (vi,vp1,vp2,...,vpm,vj) 是一条路径。对于不带权的图,路径长度是指该路径上的边数,对于带权图,路径长度值该路径上各条边的权值之和。简单路径是路径上个各顶点互不重复。回路指起点和终点相同且长度大于1的简单路径。
- 连通性:在无向图中,如果从顶点到顶点有路径,则称两个顶点连通,如果图中任意两个顶点都是连通的,则称该图为连通图,无向图中的极大连通子图称为该图的连通分量。在有向图中,如果每对顶点之间都存在两条方向相反的路径,则称该图是强连通的。有向图的极大强连通子图称为 该图的强联通分量。
- 连通图的生成树:连通图首先是无向图,连通的无回路的无向图称为树。树中无回路且连通,如果去掉树中如意一条边,则变为森林,加上一条边则构成回路。一棵树有n个顶点,则有n-1条边。连通图的生成树是图的连通无回路子图。一个非联通无向图,其各连通分量的生成树组成该图的生成森林。
- 最小生成树:设
G
是一个带权连通无向图,
w(e) 是边 e 的权,T 是 G 的生成树,T 中各边的权重之和 w(T)=∑e∈Tw(e) 称为生成树 T 的权。最小生成树是权重最小的生成树。 - 最短路径:设
G=(V,E) 是一个带权图,若 G 中从顶点vi 到 vj 的一条路径 (vi,...,vj) ,其路径长度是所有从 vi 到 vj 的路径中的最小值,则 (vi,...,vj) 是从 vi 到 vj 的最短路径, vi 称为源点, vj 称为终点。
图的存储结构
存储一个图包括存储图的顶点集合和边集合。通常采用顺序表存储图的顶点集合,而边集合有邻接矩阵和邻接表两种存储结构。
邻接矩阵
邻接矩阵是表示图中各顶点之间邻接关系的矩阵。根据边是否带权值,分为两种形式。
- 不带权图的邻接矩阵:设图
G=(V,E)
有n个顶点,
V=[v0,v1,...,vn−1]
,
E
可用一个
n∗n 的矩阵描述,矩阵中元素为 aij ,如果 (vi,vj)∈E 或 <vi,vj>∈E <script type="math/tex" id="MathJax-Element-359"> \in E</script>, aij=1 ,否则 aij=0 。无向图的邻接矩阵是对称的。有向图的邻接矩阵不一定对称。从邻接矩阵可知顶点的度。无向图中,邻接矩阵第i行或第i列元素之和是顶点 vi 的度。有向图中,邻接矩阵第i行上元素之和是顶点 vi 的出度,第i列上元素之和是顶点 vi 的入度。 - 带权图的邻接矩阵:设图
G=(V,E)
有n个顶点,
V=[v0,v1,...,vn−1]
,
E
可用一个
n∗n 的矩阵描述,矩阵中元素为 aij ,如果 (vi,vj)∈E 或 <vi,vj>∈E <script type="math/tex" id="MathJax-Element-371"> \in E</script>,且 vi≠vj , aij=wij ,如果 (vi,vj)∈E 或 <vi,vj>∈E <script type="math/tex" id="MathJax-Element-375"> \in E</script>,且 vi=vj , aij=0 。否则 aij=∞ 。
图的连接矩阵存储了任意两个顶点间的邻接关系或权值,能够实现各种操作。判断两个顶点是否邻接、获取与设置边的权值等操作时间复杂度为O(1),但是增加或删除边,需要移动大量元素,效率很低。另外在图的邻接矩阵中,如果两个点之间没有边,矩阵相应位置也存储了元素,对于稠密图,存储效率较高,但是对于稀疏图,存储效率较低,此时需要用邻接链表。
邻接链表
图的邻接链表,采用顺序表存储顶点集合,采用链表存储和一个顶点相关的多条边的信息。每一个顶点和其邻接的边构成一个元素,存储在线性表中,这个线性表即为邻接链表。
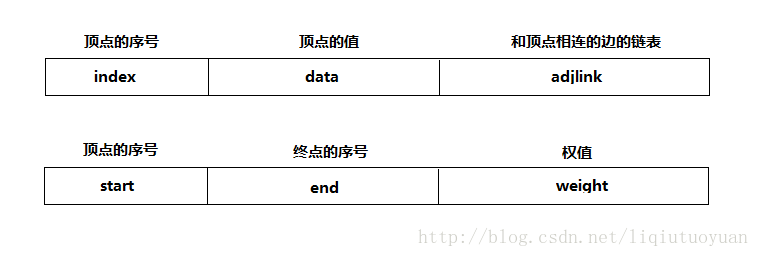
以加权有向图为例,邻接链表是一个线性表,其中每个元素有三个域构成,顶点的序号,顶点的值,和顶点相连的边构成的链表。其中加权图有向边也包含三个域,起点的序号,终点的序号,权值。
关于图的算法
图中的算法可以分成三大类:图的遍历,图的最小生成树算法和最短路径算法。
图的遍历
图的遍历是指从图
G
中任意一点
- 指定遍历的第一个访问顶点
- 由于一个顶点可能与多个顶点相邻,因此要在多个邻接顶点之间约定访问次序
- 由于图中可能存在回路,在访问某个顶点之后,可能沿着某条路径又回到该顶点。因此,为了避免重复访问同一顶点,在遍历过程中必须对访问过的顶点做标记
根据第2条中访问次序的不同,图的遍历有两种操作:深度优先搜索和广度优先搜索。
图的深度优先搜索遍历
图的深度优先搜索(DFS)的策略是:访问某个顶点 vi ,寻找 vi 的一个邻接顶点 vj 访问,再寻找 vj 的一个邻接顶点 vk 访问,如此反复执行,走过一条较长的路径到达最远的顶点。如果顶点 vk 没有未被访问的其他邻接顶点,则退回到前一个被访问的顶点,再寻找其他访问路径。
图的深度优先搜索遍历算法有递归和非递归两种:
递归版本:从图中一个顶点 vi 出发的一次深度优先搜索遍历算法描述如下
- 访问顶点 vi ,标记 vi 为已访问状态
- 选定 vi 的一个未被访问的邻接顶点 vj ,从 vj 开始进行深度优先搜索,递归算法
- 如果和 vj 邻接的所有顶点都是已访问状态,则退回到 vi
- 如果 vi 仍有未被访问的下一个邻接顶点 vk ,则从 vk 出发继续搜索;否则由顶点 vi 出发的一次搜索结束
非递归版本:从图中一个顶点 vi 出发的一次深度优先搜索遍历算法描述如下
初始化一个栈
访问 vi ,标记 vi 为已访问状态,并将 vi 入栈
重复以下操作,直到栈为空
取栈顶元素但不出栈
如果该顶点有一个未被访问的邻接顶点 vj ,则访问顶点 vj ,标记 vj 为已访问状态,并入栈
否则该顶点出栈
对于一个联通无向图或者一个强联通有向图,从一个顶点出发一次遍历就可以访问图中所有顶点。对于一个非联通无向图或者非强联通有向图,从一个顶点出发的一次遍历只能访问图中的一个联通分量。因此遍历一个非连通图需要遍历各个连通分量。
图的广度优先搜索遍历
广度优先搜索(BFS)的策略是:访问某个顶点 vi ,接着访问 vi 所有的未被访问的邻接顶点 vj,vk,vt,... ,再依次访问 vj,vk,vt,... 的所有未被访问的邻接顶点,如此反复执行,直到访问完图中所有顶点。图的广度优先搜索类似于树的层次遍历。
图的广度优先搜索遍历算法一般只用非递归方法:
从图中一个顶点 vi 出发的一次广度优先搜索遍历算法描述如下
初始化一个队列
将 vi 入队,标记 vi 为已入队状态
重复以下操作,直到队列为空
队头元素出队,访问,找到该顶点所有未入队的邻接顶点,依次入队,并标记为已入队状态
因为所有如果的顶点都能够被访问,所以这里标记的是顶点是否入队的状态,和深度优先遍历不同。
和深度优先搜索一样,对于一个联通无向图或者一个强联通有向图,从一个顶点出发一次遍历就可以访问图中所有顶点。对于一个非联通无向图或者非强联通有向图,从一个顶点出发的一次遍历只能访问图中的一个联通分量。因此遍历一个非连通图需要遍历各个连通分量。
最小生成树
按照生成树的定义,n个顶点的连通无向图的生成树有 n−1 条边。因此,构造最小生成树的准则有以下三条:
- 必须使用该图中的边来构造最小生成树
- 必须使用且仅使用 n−1 条边来连接图中的n个顶点
- 不能使用产生回路的边
构造最小生成树主要有两种方法:Prim算法和Kruskal算法。这两种算法都是基于最小生成的MST性质。
MST性质:设
G=(V,E)
是一个连通带权无向图,
TV
是顶点集合
V
的非空真子集。如果
Prim
以《算法导论》上368页的一个例子说明Prim算法的过程。

设上图是图 G=(V,E) ,最小生成树 T=(TV,TE) 。
- 最初
T
中只有一个顶点
a ,没有边, TV={A},TE={},V−TV={b,c,d,e,f,g,h,i} - 在所有的
tv∈TV,v∈V
的边
(tv,v)∈E
中,选择权值最小的边加入
T
中。在上图,一个顶点在
TV 中,另一个顶点在 V−TV 中的边有 {(a,b),(a,h)} ,其中权值最小的边为 (a,b) ,将顶点 b 和边(a,b) 加入最小生成树 T 中,得到TV={a,b},TE={(a,b)},V−TV={c,d,e,f,g,h,i} ,此时生成树的权值为4 - 在所有的
tv∈TV,v∈V
的边
(tv,v)∈E
中,选择权值最小的边
(b,c)
加入
TE
,将
c
加入
TV ,此时 TV{a,b,c},TE={(a,b),(b,c)},V−TV={d,e,f,g,h,i} 。重复以上步骤,依次加入的边为 {(c,i),(c,f),(i,g),(g,h),(c,d),(d,e)} , TV 中的顶点也不断增加。当 TV=V 时, T=(TV,TE) 就是一颗最小生成树。
Prim算法的描述如下:设 Ti 表示有i个顶点的最小生成树
- 最初 T1 只有一个顶点,没有边,即 TV={v0},TE={},w(T1)=0
- 如果对于 Ti 有 w(Ti)=∑e∈TE 最小,在所有 tv∈TV,v∈V−TV 的边 (tv,v)∈E 中,选择权值最小的一条边 (tvi,vi) 加入 Ti 得到 Ti+1 ,根据MST性质, w(Ti+1)=w(Ti)+(tvi,vi) 最小
- 重复执行步骤2,直到 TV=V
在实现Prim算法是需要设置一个大小为 n−1 的数组记录从 TV 到 V−TV 具有最小权值的边。
Kruskal
Kruskal算法也是根据MST特性,采用贪心策略逐步求解,每次选择权值最小的且不产生回路的一条边加入生成树,直到加入 n−1 条边。可以看出,用Kruskal算法构造最小生成树主要有两点:1、如何找到权值最小的边;2、如何判断没有生成回路。
Kruskal算法构造加权无向图的算法描述如下:设 G=(V,E) 是有n个顶点的加权无向图, T=(TV,TE) 是最小生成树
- 最初
TV=T,TE={}
,即
T
有
G 的n个顶点却没有边,每个顶点构成一个联通分量 - 选择权值最小的一条边 (u,v)∈E ,并且该边的两个顶点 u,v 分别属于两个联通分量,将此边加入 TE ,并合并 u,v 所在的两个联通分量;如果 u,v 在同一个联通分量中,则放弃该条边
- 重复执行步骤2,直到 TE 中有 n−1 条边或所有顶点处于一个连通分量中
因为Kruskal算法是根据权值大小选择边的,所以当图中有权值相同的边时,最小生成树不唯一。
在实现过程中,所有边的集合是一个成员变量,通过排序可以得到权值最小的边。设置一个数组放置连通标记,标记一样的顶点联通,在循环中更新数组。
最短路径
求最短路径主要依据的是最短路径的最优子结构性质。描述如下:给定带权重的有向图
G=(V,E)
和权重函数
w:E→R
。设
p=<v0,v1,...,vk>
为从节点
v0
到
vk
的一条最短路径,设
pij=<vi,vi+1,...,vj>
是路径
p
的一条子路径,那么
另外最短路径中不能有回路。如果有负回路,则无法求出最短路径,如果有正回路,不是最短路径,如果回路的权值为0,则去掉该回路无影响。所以最短路径中没有回路。对于有n个顶点的带权图,其最短路径最多包含 n−1 条边。
Dijkstra算法
Dijkstra算法求解的是带权有向图中单源最短路径的问题,该算法要求图中所有边的权重非负。该算法可以得到指定源点到图中其他各个顶点的最短路径。Dijkstra算法是广度优先搜索的扩展。以源点为中心层层向外扩展,直到求出所有点的最短路径。
问题描述:给定带权有向图 G=(E,V) ,每条边的权重非负,给定源点 v0 ,求 v0 到其余各顶点的最短路径。
算法描述:给定带权有向图
G=(V,E)
,将其顶点分成两部分,一部分是
S
,表示已经求出最短路径的顶点集合,初始为
算法步骤:设
- 设置
S={v0},U=V−S,disti=w0i,i=1,2,...,n−1
。从
U
中所有的顶点中找到
disti 最小的值对应的顶点 vj ,即 j=araminvj∈Udistj , S={v0,vj} ,并将 vj 从 U 中取出; - 假设第k步并入
S 的顶点是 vk ,根据 vk 对 U 中顶点的distj 更新。对任意的 vj∈U ,如果 distk+wkj<distj ,则将 distj 更新为 distk+wkj .更新过后重复步骤1,从 U 中找到distj 最小的顶点加入 S - 重复以上步骤,直到
U 为空集
在实现的过程中,需要记录顶点属于哪个集合,记录每个顶点当前最短路径长度以及记录最短路径。利用三个数组vest,path和dist
- vest[j]==1表示顶点 vj 在集合 S 中,初始vest[0]=1
- path[j]表示从源点
v0 到 vj 的最短路径 (v0,...,vk,vj) 中 vk 的序号,即最短路径上 vj 的前驱 - dist[j]表示 v0 到 vj 的当前最短路径,如果无通路,设置为 ∞ ,一般用优先队列实现
Dijkstra算法求解的是从指点源点到图中各点的最短路径,是贪婪算法,在迭代的过程中,每次求出源点到一个顶点的最短距离。如果要求指定两个顶点 vi,vj 间的最短距离,以 vi 为源点进行Dijkstra算法,当 vj 的最短路径求出时,算法停止。
有向无环图的单源最短路径有线性时间算法,时间复杂度可以达到为 O(V+E) 。对于有环图,Dijkstra的时间复杂度是?,分析如下。
在《算法导论》中,对于Dijkstra算法的描述如下:
Dijkstra(G,s)
1. 初始化源点
2. 设置S为空集
3. 优先队列Q=G.V,将所有顶点加入优先队列
4. while Q非空
5. u=ectractMin(Q),取出Q队首元素
6. 将u加入S
7. 对任意的u的邻接顶点v
8. relax(u,v,w),相当于更新U中顶点的当前最小路径长度这里的Dijkstra算法由优先队列辅助实现。在算法中,需要执行三种优先队列的操作,第3行的插入操作(insert),用所有顶点构造一个优先队列;第5行的取出最小元素(poll)和第8行的更新键值操作(update)。(难点是如何更新键值)。三种操作中插入和取出操作对每个顶点执行一次,一共执行 |V| 次。更新键值在7、8行的循环中,对连接u和v的边也只操作一次,所以一共执行 |E| 次(当图是无向图时,指向2|E|次)。
Dijkstra算法总的运行时间依赖于优先队列的实现。有三种实现方式(和自己实现Dijkstra的过程一样):
- 利用数组来实现优先队列。前文中介绍Dijkstra算法时,用数组来存储每个节点的当前最小路径长度。insert和update操作的时间是 O(1) ,poll操作时需要遍历整个数组找到最小值,所以是 O(V) 。总体时间复杂度为 O(V2+E)
- 如果用二叉堆来实现最小优先队列,比如Java中的PriorityQueue。利用V个顶点构造堆的时间复杂度是 O(V) ,每一次poll操作的时间是 O(lgV) 。PriorityQueue中没有关于更新键值的操作,所以需要先remove()再offer(),所以update时间是 O(lgV) 。所以总的时间复杂度为 O(V+VlgV+ElgV)=O((V+E)lgV) 。如果所有节点都可以从源点到达,则 E>V ,时间复杂度可以写作 O(ElgV)
- 用斐波那契堆实现,斐波那契堆的构造时间是 O(V) ,poll时间是 O(lgV) ,但是update时间是 O(1) 。总的时间复杂度是 O(V+VlgV+E) 。如果所有节点都可以从源点到达,则 E>V ,时间复杂度可以写作 O(VlgV+E) 。从历史角度来说,斐波那契堆提出的动机就是人们观察到Dijkstra算法调用update操作的次数比poll次数更多,所以任何能将update操作的摊还代价降低到 o(lgV) 而又不增加poll时间的方法都比二叉堆更优。
Dijkstra算法即类似于广度优先搜索,又类似于最小生成树Prim算法。Dijkstra算法本质上是一种广度优先搜索,没有回溯。在广度优先搜索中将遍历过的顶点放在集合S中,这些顶点的广度优先距离已知,正如Dijkstra算法S中顶点的最短路径已知。Dijkstra算法和Prim算法相同点在于,两个算法搜给定初始顶点集合S(Princess算法中是T、E),用最小优先队列(也可以使用数组存储,然后比较)找到可以加入集合的顶点,并将位于集合外的顶点的权重进行相应的调整。
Floyd算法
Folyd算法是以图的邻接矩阵表示为基础。














 332
332











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









