






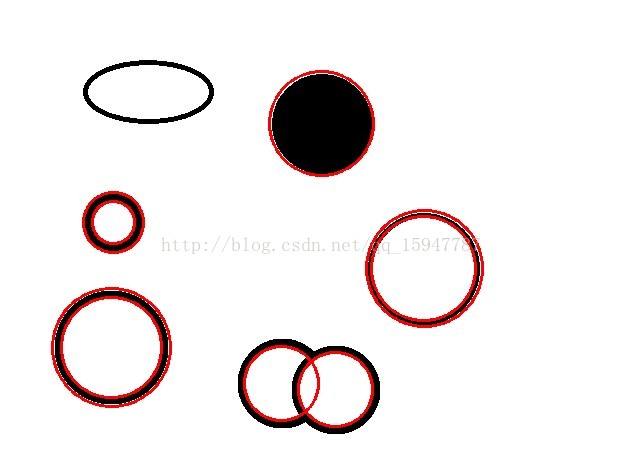
hough圆检测不是很稳定,需要调节的参数也比较多,即便半径都调节到合适的范围内,但是结果有时候仍然存在较大偏差,但是hough受噪声影响小,不受轮廓不连续影响。但是如果存在比较完整的轮廓,也可以直接对轮廓进行一个圆的检测。依据为圆的定义,“平面上到定点的距离等于定长的所有点组成的图形叫做圆.”
//************************************
// Description: 两点距离
// Method: GetDistance
// FullName: GetDistance
// Access: public
// Parameter: Point2f p1
// Parameter: Point2f p2
// Returns: float
// Author: 小白
// Date: 2017/09/27
// History:
//************************************
float GetDistance(Point2f p1, Point2f p2)
{
float dis = sqrt((p1.x - p2.x) * (p1.x - p2.x) + (p1.y - p2.y) * (p1.y - p2.y));
return dis;
}
//************************************
// Description: 根据轮廓点和圆心计算方差
// Method: ComputeVariance
// FullName: ComputeVariance
// Access: public
// Parameter: std::vector<cv::Point> theContour 某个轮廓点向量
// Parameter: Point2f theCenter 最小外接圆圆心
// Returns: float
// Author: 小白
// Date: 2017/09/27
// History:
//************************************
float ComputeVariance(std::vector<cv::Point> theContour, Point2f theCenter)
{
int n = theContour.size();
vector<int> a(n);
float aver,s;
float sum = 0, e = 0;
for(int i = 0; i < n; i++)
{
a[i] = GetDistance(theContour[i],theCenter);
sum += a[i];
}
aver = sum / n;
for(int i = 0; i < n; i++)
e += (a[i] - aver) * (a[i] - aver);
e /= n - 1;
s = sqrt(e);
return e;
}
//************************************
// Description: 判断某个轮廓是否为圆
// Method: FindCircles
// FullName: FindCircles
// Access: public
// Parameter: Mat img 二值化图(不是边缘检测结果)
// Parameter: int minPoints 轮廓最小点数(过滤噪点)
// Parameter: int maxOffset 圆检测最大偏差
// Parameter: int minr 最小半径
// Parameter: int maxr 最大半径
// Returns: vector<Point3f>
// Author: 小白
// Date: 2017/09/27
// History:
//************************************
vector<Point3f> FindCircles(Mat img, int minPoints, int maxOffset, int minr, int maxr)
{
vector<Point3f> result;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours( img.clone(), contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE );
for (int i = 0; i < contours.size(); i++)
{
Point2f center; float radius;
if (contours[i].size() > minPoints)
{
minEnclosingCircle(contours[i], center, radius);//得到最小外接圆圆心和半径
int offset = ComputeVariance(contours[i], center);
if (offset < maxOffset && radius > minr && radius <= maxr)
{
Point3f p(center.x, center.y, radius);
result.push_back(p);
}
}
}
return result;
}
void main()
{
Mat a = imread("t.jpg", 1);//原图
Mat b;//灰度图
cvtColor(a, b, CV_BGR2GRAY);
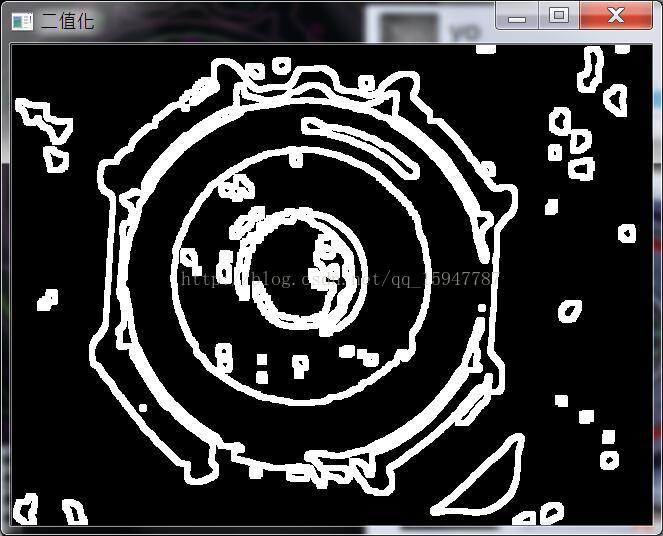
Mat c;//二值图
threshold(b, c, 128, 255, CV_THRESH_BINARY);
int minr = 0;
int maxr = 100;
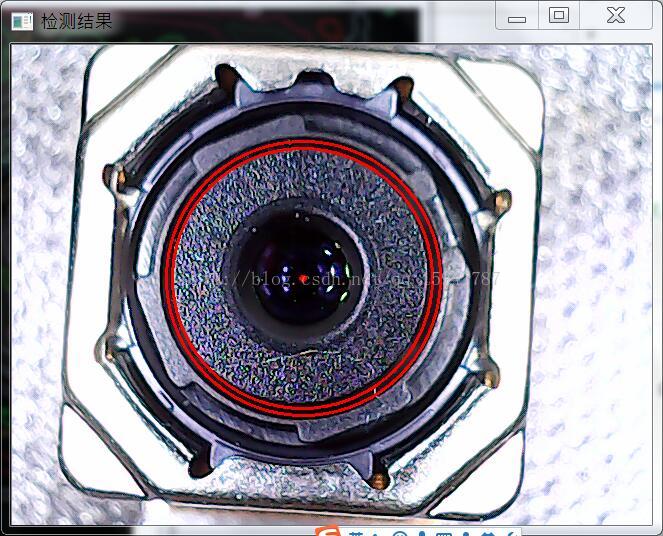
vector<Point3f> circles = FindCircles(c, 50, 80, 0, 100);//检测结果
for (int i = 0; i < circles.size(); i++)
{
circle(a, Point(circles[i].x, circles[i].y), circles[i].z, Scalar(0,0,255), 2, 8, 0);
}
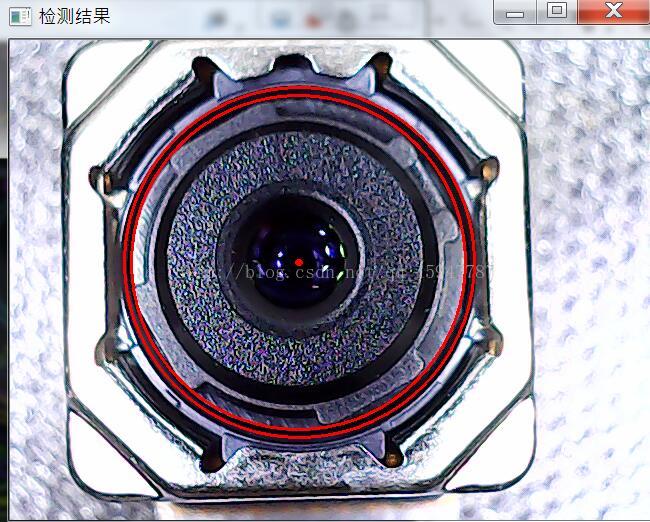
imshow("检测结果", a);
waitKey(0);
}

结果图


















 176
176

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









