







HoughCircles查找圆环,就是一个不断调节参数的过程。
vector<Vec3f> circles;
//霍夫变换检测圆(就是一个参数调节的过程啊,要有耐心)
HoughCircles(src_gray, circles, CV_HOUGH_GRADIENT,
1.6, //累加器图像的分辨率,增大则分辨率变小
10, //很重要的一个参数,告诉两个圆之间的距离的最小距离,如果已知一副图像,
//可以先行计算出符合自己需要的两个圆之间的最小距离。
230, //canny算法的阈值上限,下限为一半
//(即100以上为边缘点,50以下抛弃,中间视是否相连而定)
40, //决定成圆的多寡 ,一个圆上的像素超过这个阈值,则成圆,否则丢弃
12, //最小圆半径,这个可以通过图片确定你需要的圆的区间范围
20 //最大圆半径
);
#include "stdafx.h"
#include<iostream>
#include <vector>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
const int kvalue = 15;//双边滤波邻域大小
int main()
{
Mat src_color = imread("c://ss.png");//读取原彩色图
imshow("原图-彩色", src_color);
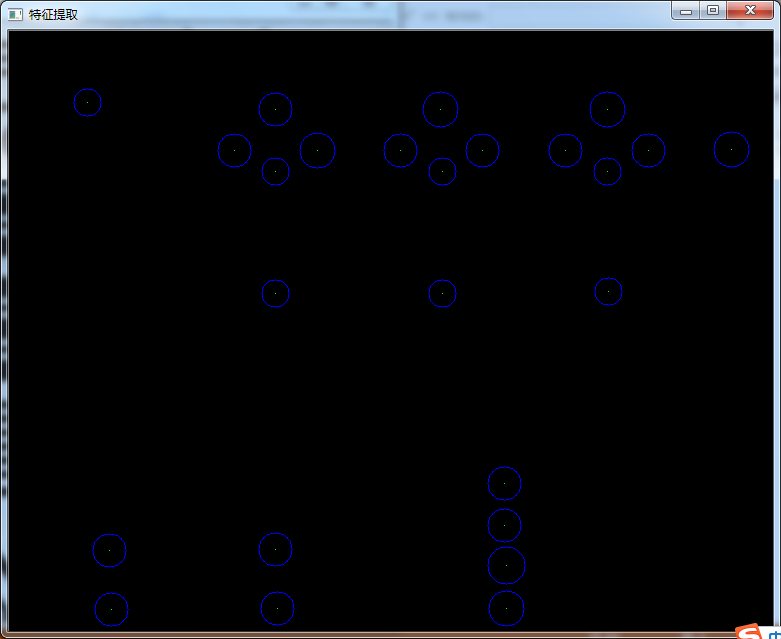
//声明一个三通道图像,像素值全为0,用来将霍夫变换检测出的圆画在上面
Mat dst(src_color.size(), src_color.type());
dst = Scalar::all(0);
Mat src_gray;//彩色图像转化成灰度图
cvtColor(src_color, src_gray, COLOR_RGB2GRAY);
//bilateralFilter(canSrc, dst, kvalue, kvalue*2, kvalue/2);
//dilate(dst, dst,getStructuringElement(MORPH_ELLIPSE,Size(7,7)));
//erode(dst, dst,getStructuringElement(MORPH_ELLIPSE,Size(5,5)));
//声明一个向量,保存检测出的圆的圆心坐标和半径
vector<Vec3f> circles;
//霍夫变换检测圆(就是一个参数调节的过程啊,要有耐心)
HoughCircles(src_gray, circles, CV_HOUGH_GRADIENT,
1.6, //累加器图像的分辨率,增大则分辨率变小
10, //很重要的一个参数,告诉两个圆之间的距离的最小距离,如果已知一副图像,可以先行计
//算出符合自己需要的两个圆之间的最小距离。
230, //canny算法的阈值上限,下限为一半(即100以上为边缘点,50以下抛弃,中间视是否相连而定)
40, //决定成圆的多寡 ,一个圆上的像素超过这个阈值,则成圆,否则丢弃
12, //最小圆半径,这个可以通过图片确定你需要的圆的区间范围
20 //最大圆半径
);
cout<<circles.size()<<endl;
cout << "x=\ty=\tr=" << endl;
for(size_t i = 0; i < circles.size(); i++)//把霍夫变换检测出的圆画出来
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
circle( dst, center, 0, Scalar(0, 255, 0), -1, 8, 0 );
circle( dst, center, radius, Scalar(255, 0, 0), 1, 8, 0 );
cout << cvRound(circles[i][0]) << "\t" << cvRound(circles[i][1]) << "\t"
<< cvRound(circles[i][2]) << endl;//在控制台输出圆心坐标和半径
}
imshow("特征提取", dst);
//imwrite("dst.png", dst);
waitKey();
}原始图
效果图















 4751
4751

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









