







 本文介绍了Deeplab图像分割方法,它在ICLR 2015上发表,通过改进FCN得到更精细的分割结果。Deeplab通过调整VGG网络的池化层步长,以及使用Hole算法,解决了感受野变化问题,实现了更密集的得分映射。Hole算法允许在网络结构调整后仍能进行fine-tuning。
本文介绍了Deeplab图像分割方法,它在ICLR 2015上发表,通过改进FCN得到更精细的分割结果。Deeplab通过调整VGG网络的池化层步长,以及使用Hole算法,解决了感受野变化问题,实现了更密集的得分映射。Hole算法允许在网络结构调整后仍能进行fine-tuning。
好久没搬砖了,刚好元旦放假,跑实验的同时,满足一下自己搬砖的欲望^_^。
尊重原创,转载请注明:http://blog.csdn.net/tangwei2014
deeplab发表在ICLR 2015上。论文下载地址:Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFS.
deeplab方法概述
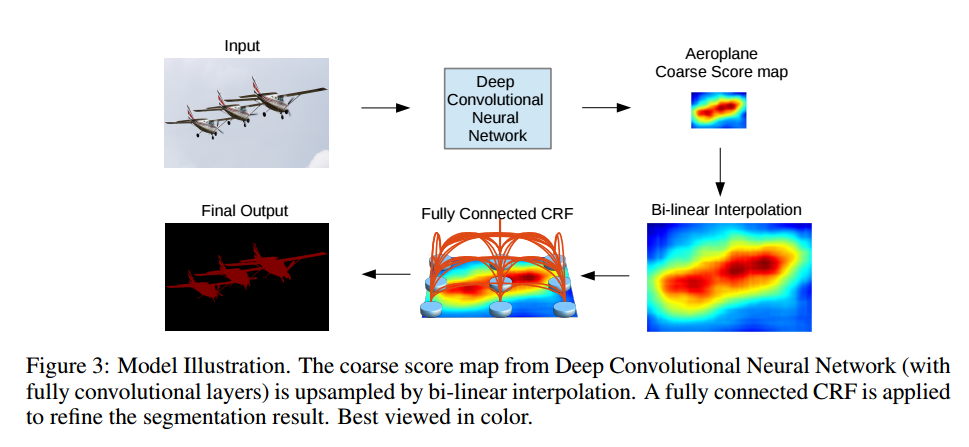
deeplab方法分为两步走,第一步仍然采用了FCN得到 coarse score map并插值到原图像大小,然后第二步借用fully connected CRF对从FCN得到的分割结果进行细节上的refine。(有关FCN的内容介绍,可以参考我的前面得一篇博客:http://blog.csdn.net/tangwei2014/article/details/46882257)
下面这张图很清楚地展示了整个结构:
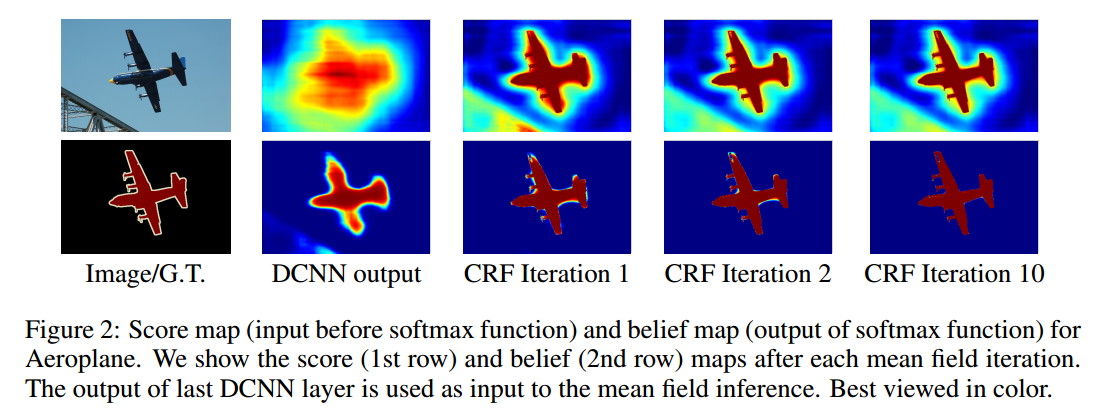
然后这张图展示了CRF处理前后的效果对比,可以看出用了CRF以后,细节确实改善了很多:
deeplab对FCN更加优雅的处理方式
在第一步中,deeplab仍然采用了FCN来得到score map,并且也是在VGG网络上进行fine-tuning。但是在得到score map的处理方式上,要比原FCN处理的优雅很多。
还记得CVPR 2015的FCN中是怎么得到一个更加dense的score map的吗? 是一张500x500的输入图像,直接在第一个卷积层上conv1_1来了一个100的大padding。最终在fc7层勉强得到一个16x16的score map。虽然处理上稍显粗糙,但是毕竟人家是第一次将图像分割在CNN上搞成end-to-end,并且在当时performance是state-of-the-art,也很理解。
deeplab摒弃了这种做法,取而代之的是对VGG的网络结构上做了小改动:将VGG网络的pool4和pool5层的stride由原来的2改为了1。就是这样一个改动,使得vgg网络总的stride由原来的32变成8,进而使得在输入图像为514x514,正常的padding时,fc7能得到67x67的score map, 要比FCN确实要dense很多很多。
但是这种改变网络结果的做法也带来了一个问题: stride改变以后,如果想继续利用vgg model进行fine tuning,会导致后面filter作用的区域发生改变,换句话说就是感受野发生变化。这个问题在下图(a) (b)中通过花括号体现出来了:Hole算法
于是乎,作者想出了一招,来解决两个看似有点矛盾的问题:
既想利用已经训练好的模型进行fine-tuning,又想改变网络结构得到更加dense的score map.
这个解决办法就是采用Hole算法。如下图(a) (b)所示,在以往
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1293
1293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









