




 本文探讨了坐标下降法(coordinate-wise minimization)的基本原理及其在不同情况下的应用,包括线性回归和支持向量机(SVM)。介绍了Tseng(2001)关于坐标下降法收敛性的开创性工作,并通过实验对比了坐标下降法与梯度下降法在求解线性回归问题上的性能。
本文探讨了坐标下降法(coordinate-wise minimization)的基本原理及其在不同情况下的应用,包括线性回归和支持向量机(SVM)。介绍了Tseng(2001)关于坐标下降法收敛性的开创性工作,并通过实验对比了坐标下降法与梯度下降法在求解线性回归问题上的性能。
首先介绍一个算法:coordinate-wise minimization
问题的描述:给定一个可微的凸函数
形式化的描述为:是不是

这里的
答案为成立。
这是因为:

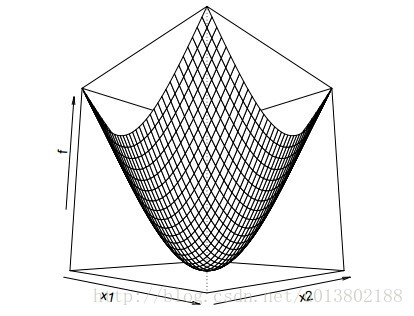
但是问题来了,如果对于凸函数f,若不可微该会怎样呢?
答案为不成立,上面的图片就给出了一个反例。
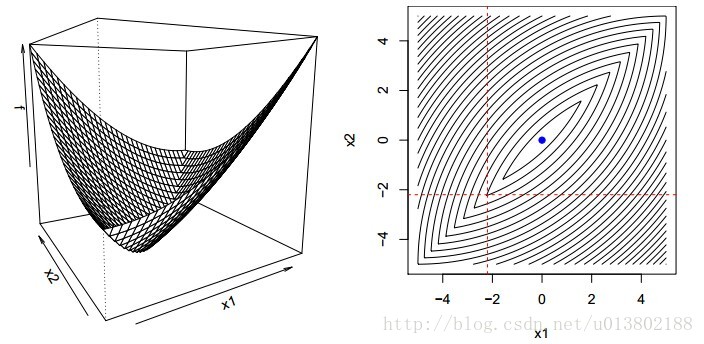
那么同样的问题,现在
答案为成立。
证明如下,对每一个y
坐标下降(Coordinate descent):
这就意味着,对所有的

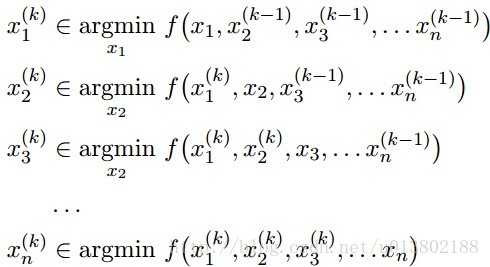
每一次我们解决了
Tseng (2001)的开创性工作证明:对这种f(f在紧集

在实分析领域:


其中:
坐标下降的顺序是任意的,可以是从1到n的任意排列。
可以在任何地方将单个的坐标替代成坐标块
关键在于一次一个地更新,所有的一起更新有可能会导致不收敛
我们现在讨论一下坐标下降的应用:
线性回归:
令


最小化xi,对所有的xj,j不等于i:

解得:
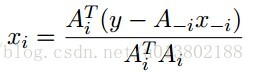
坐标下降重复这个更新对所有的

对比坐标下降与梯度下降在线性回归中的表现(100个实例,n=100,p=20)
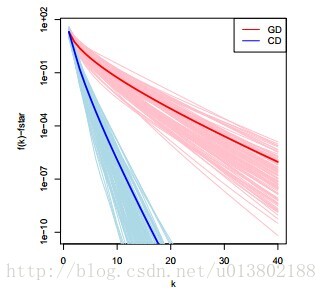
将坐标下降的一圈与梯度下降的一次迭代对比是不是公平呢?是的。

其中r=y-Ax。每一次的坐标更新需要O(n)个操作,其中O(n)去更新r,O(n)去计算
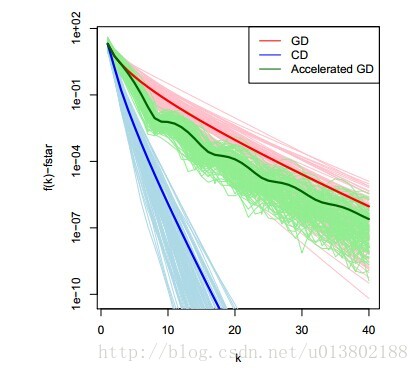
我们用相同的例子,用梯度下降进行比较,似乎是与计算梯度下降的最优性相违背。
那么坐标下降是一个一阶的方法吗?事实上不是,它使用了比一阶更多的信息。
现在我们再关注一下支持向量机:
SVM对偶中的坐标下降策略:

SMO(Sequentialminimal optimization)算法是两块的坐标下降,使用贪心法选择下一块,而不是用循环。
回调互补松弛条件(complementaryslackness conditions):

v,d,s是原始的系数,截距和松弛,其中
SMO重复下面两步:
选出不满足互补松弛的αi,αj
最小化αi,αj使所有的变量满足条件
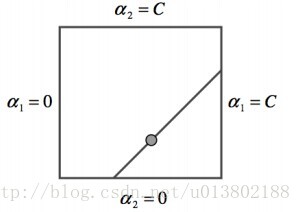
第一步使用启发式的方法贪心得寻找αi,αj,第二步使用等式约束。

















 699
699










 到【灌水乐园】发言
到【灌水乐园】发言







