









 本文探讨了坐标下降法如何在凸函数中找到局部极小值,以及在不可微情况下可能遇到的问题。它解释了凸函数下找到局部极值即为全局的情况,同时介绍了严格和块坐标下降法的区别。关键点在于凸性、局部极值与全局最小值的关系以及特定函数结构的影响。
本文探讨了坐标下降法如何在凸函数中找到局部极小值,以及在不可微情况下可能遇到的问题。它解释了凸函数下找到局部极值即为全局的情况,同时介绍了严格和块坐标下降法的区别。关键点在于凸性、局部极值与全局最小值的关系以及特定函数结构的影响。
概念
- 见下:
- 其实就是先固定其他相关变量的值,只对某个未知变量进行优化。
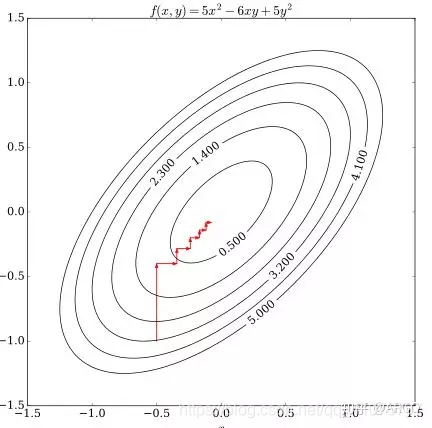
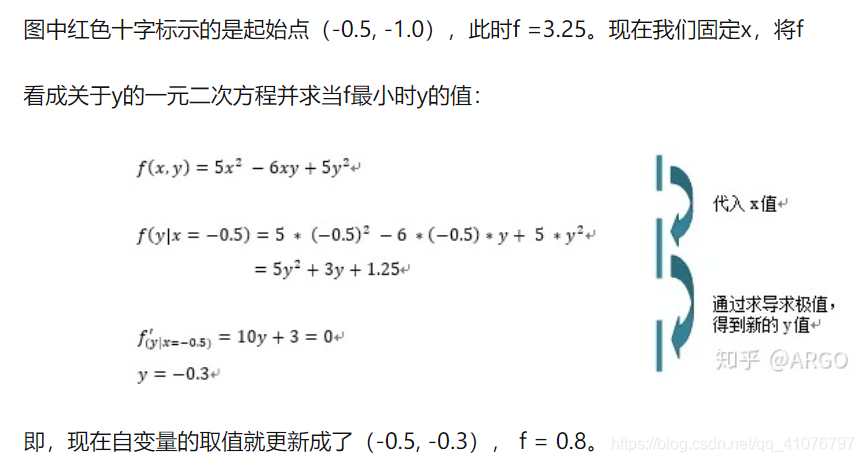
原理
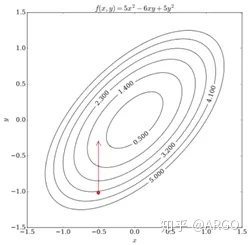
坐标下降法与全局最小值
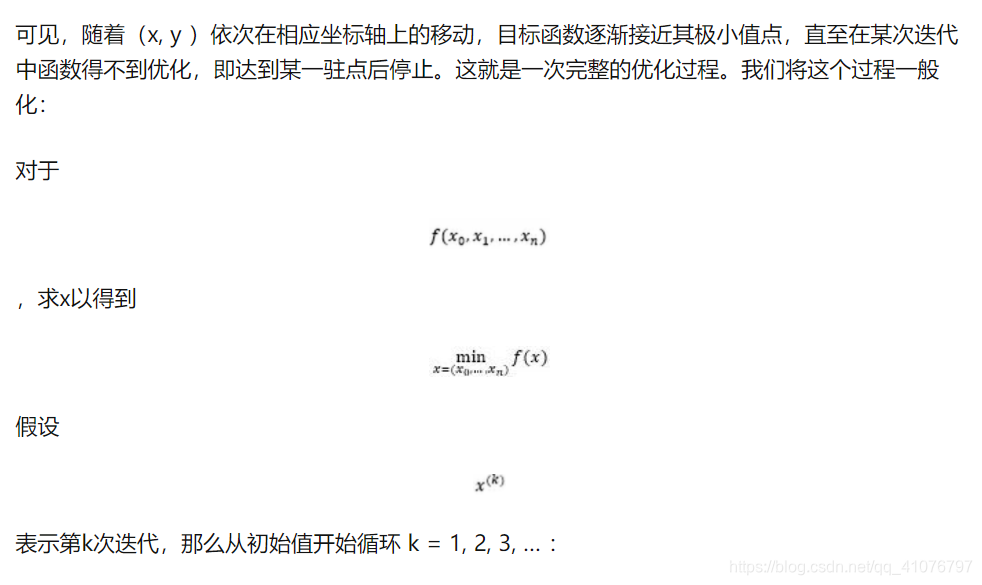
-
那么问题来了,假如我们寻找到了一个点x使得在所有单个坐标轴上f(x)都最小,是否证明我们找到了全局最小值点?
-
这个问题要分情况来看:
-
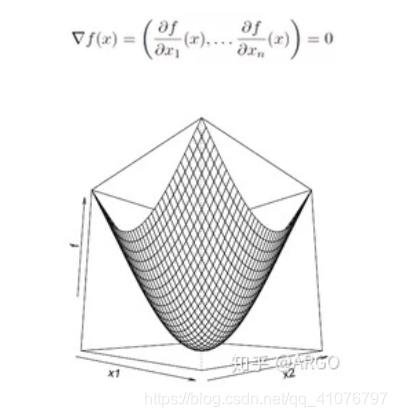
a. 若f(x)是可微的凸函数,答案是Yes,因为f(x)在任何坐标方向上求偏导都是0,并且对于凸函数来说,局部极小值就是全局最小值:
-
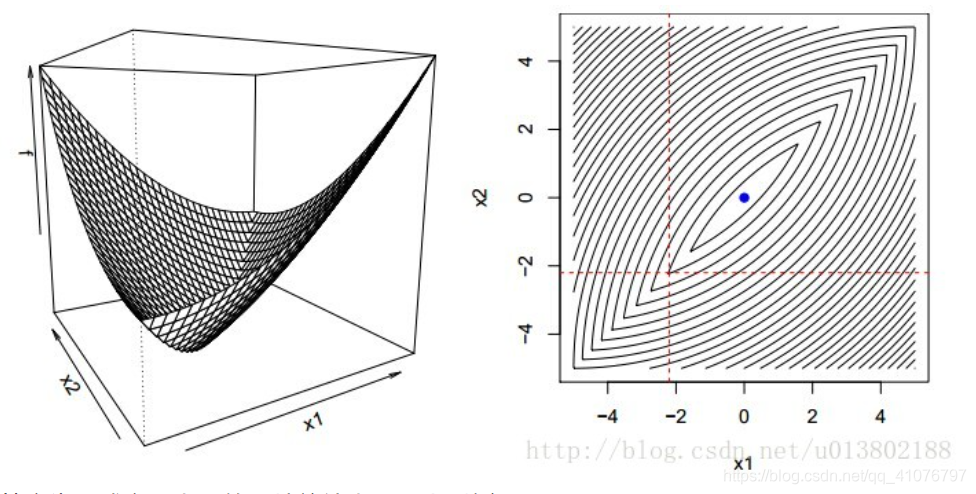
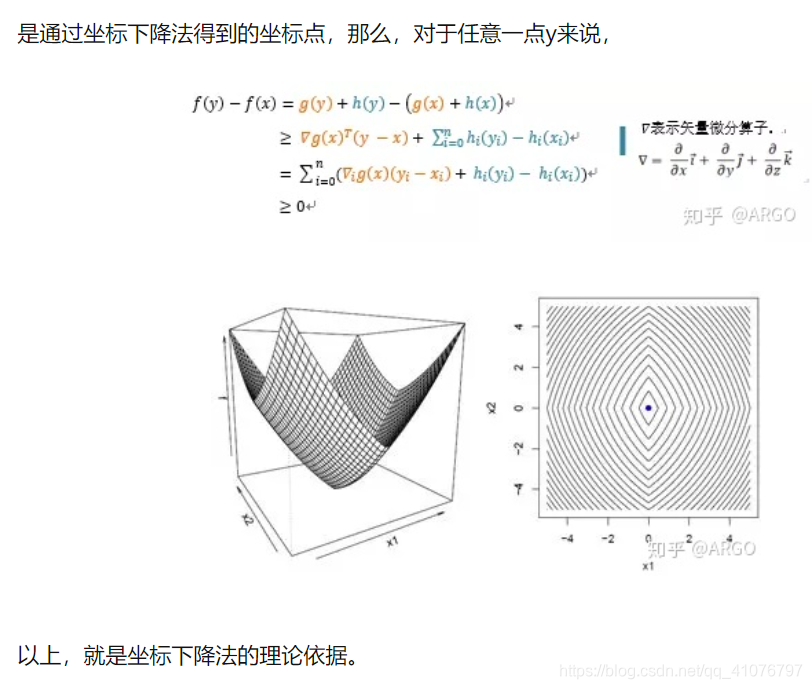
b. 若f(x)是不可微的凸函数,答案是No,我们可以很容易举出反例,比如下图中算法会在不可微点(右图中红色虚线交叉点)停止迭代,因为在任意坐标方向上f(x)都找不到的更小值了。
知道为什么嘛?红点处对应的就是三维图这里的位置:
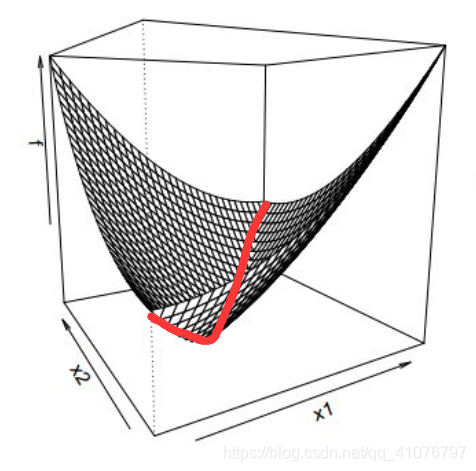
这个红色的凹槽处任何一点都会导致坐标下降法停止,然而真正的最低点只有一处,不用我说了吧。
为什么导致坐标下降法停止呢?因为在这条凹槽上的任何一点,你尝试沿着 x 1 x_1 x1, x 2 x_2 x2方向移动,你发现每个方向都会导致函数值 f ( x ) f(x) f(x)增加,所以坐标下降法认为到达底部了,其实没有。 -
c.见下:
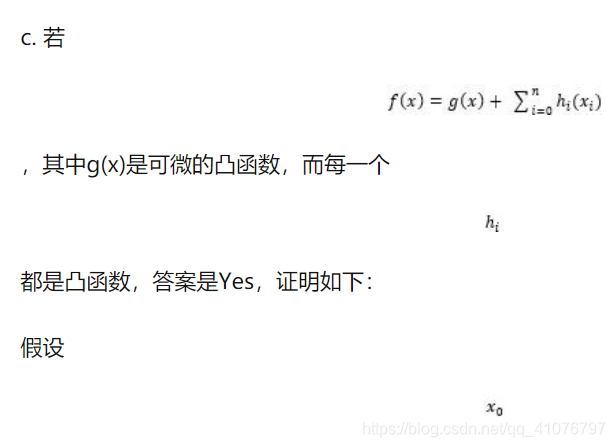
因为是凸函数,所以有上式中的第一个 > = >= >=符号,你可以随机取两点想象一下。然后又由于 x x x是咱们用坐标下降法得到的最终结果,所以在每个维度求和的时候,第一项应当为0 ,即 ▽ g ( x ) ( y i − x i ) ▽g(x)(y_i-x_i) ▽g(x)(yi−xi)中的梯度为0,所以该项=0,而后面一项你要这么理解。首先,每一个 h i h_i hi都是凸函数是什么意思?就是在每个维度上,都增加了一个凹槽,该凹槽是凸函数状的,如图:
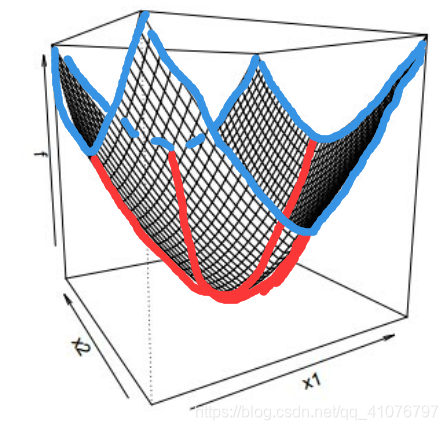
上图中的两个红色凹槽分别是平行于两个坐标轴的,他们就是 h 1 h_1 h1, h 2 h_2 h2,两个凸函数。其实通过b你也能看出来,凹槽存在不可怕,可怕的是存在像b中那样的凹槽,对于两个坐标的增益都是负的,而这里的两个凹槽你可以试一试,不可能出现b中的情况,因为它们的平行于坐标轴的。所以当你真正达到坐标下降法的最低点后,公式中的 h i ( y i ) − h i ( x i ) h_i(y_i)-h_i(x_i) hi(yi)−hi(xi)必然是正的。
特点
- 坐标轴的顺序可以是任意的,可以使用{1,2,…,n}的任何排列
- 之前我们介绍的是严格的坐标下降法,即每次仅沿着单个坐标轴的方向寻找函数极小值。与之相对应的是块坐标下降法,即每次沿着多个坐标轴的方向(超平面)取极值。
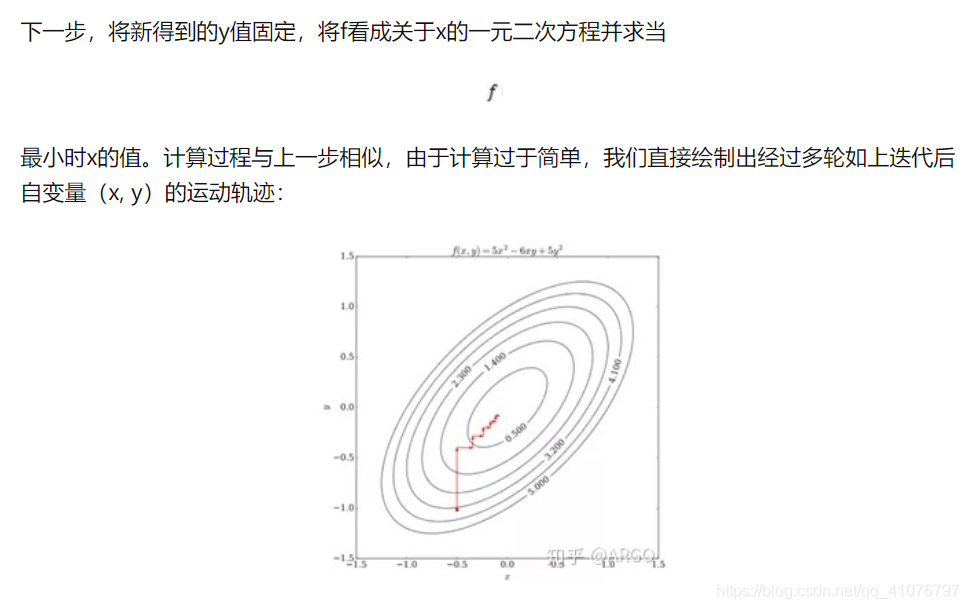
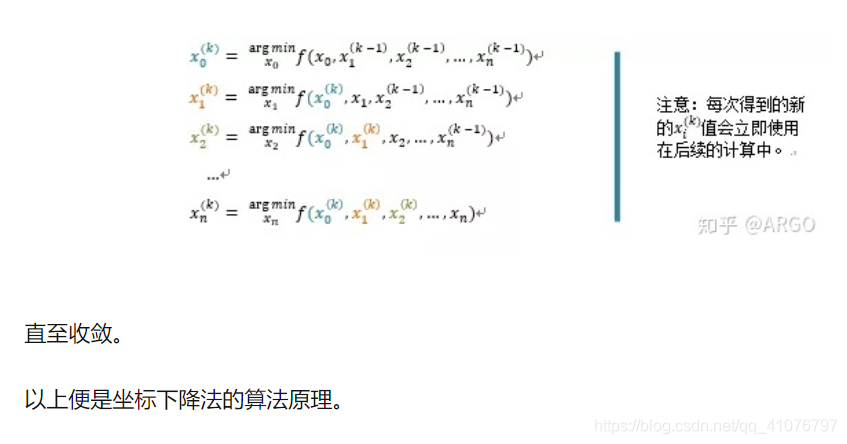
- 将新的
- 见下:


















 190
190

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











