







DPM中使用的HOG特征提取方法,和原始的HOG不太一样,比原来的要快一些,检测效果也好一些。下边的代码是从作者的目标检测中抽出的,详情见这里。虽然已经比原始HOG快了不少,但仍有一些优化空间,比如代码中存在一些不必要的乘法,多余的计算等。
//fast hog 源码注释,求出的特征和原始的特征不太一样
//参考论文“Object detection with discriminatively train part based models”
//zhangyaocold@gmail.com
#include <math.h>
#include "mex.h"
// small value, used to avoid division by zero
#define eps 0.0001
// unit vectors used to compute gradient orientation
//把cos(a)和sin(a)按[0, pi]分为9个bin,快速近似计算梯度方向使用
double uu[9] = {1.0000,
0.9397,
0.7660,
0.500,
0.1736,
-0.1736,
-0.5000,
-0.7660,
-0.9397};
double vv[9] = {0.0000,
0.3420,
0.6428,
0.8660,
0.9848,
0.9848,
0.8660,
0.6428,
0.3420};
static inline float min(float x, float y) { return (x <= y ? x : y); }
static inline float max(float x, float y) { return (x <= y ? y : x); }
static inline int min(int x, int y) { return (x <= y ? x : y); }
static inline int max(int x, int y) { return (x <= y ? y : x); }
// main function:
// takes a double color image and a bin size
// returns HOG features
//输入:三通道图像,每个cell的大小8x8
mxArray *process(const mxArray *mximage, const mxArray *mxsbin) {
double *im = (double *)mxGetPr(mximage);
const int *dims = mxGetDimensions(mximage);//图像维度三个值分别是{H, W, C};
if (mxGetNumberOfDimensions(mximage) != 3 ||
dims[2] != 3 ||
mxGetClassID(mximage) != mxDOUBLE_CLASS)
mexErrMsgTxt("Invalid input");
int sbin = (int)mxGetScalar(mxsbin);
// memory for caching orientation histograms & their norms
int blocks[2];//这里用block来表示一个8x8的小块,paper里是用cell来表示,表搞混了,这个数组存的是H和W各可以划分多少cell
blocks[0] = (int)round((double)dims[0]/(double)sbin);//H方向多少个cell
blocks[1] = (int)round((double)dims[1]/(double)sbin);//W方向多少个cell
float *hist = (float *)mxCalloc(blocks[0]*blocks[1]*18, sizeof(float));//存梯度的直方图,每个方向一页,总共18个方向,共18页
float *norm = (float *)mxCalloc(blocks[0]*blocks[1], sizeof(float));//归一化因子,
// memory for HOG features
int out[3];//输出特征的维数
out[0] = max(blocks[0]-2, 0);//减2的原因:因为图像没有扩展,直方图的第一行,第一列和最后一行,最后一列不方便计算,所以宽、高各减去一
out[1] = max(blocks[1]-2, 0);
out[2] = 27+4+1;//每个cell的最终输出维度为32维,不同于原始HOG的36维
mxArray *mxfeat = mxCreateNumericArray(3, out, mxSINGLE_CLASS, mxREAL);//分配输出内存空间
float *feat = (float *)mxGetPr(mxfeat);
int visible[2];//输入图像不一定是cell大小的整数倍,因此要进行裁剪,这里存的是裁剪后的H,W;
visible[0] = blocks[0]*sbin;
visible[1] = blocks[1]*sbin;
//这个循环计算梯度方向和幅值,并投影到相应的梯度直方图中
for (int x = 1; x < visible[1]-1; x++) {
for (int y = 1; y < visible[0]-1; y++) {
//下边计算三个通道的x,y方向梯度,取幅值最大的幅值、dx、dy作为有效值
// first color channel
double *s = im + min(x, dims[1]-2)*dims[0] + min(y, dims[0]-2);
double dy = *(s+1) - *(s-1);
double dx = *(s+dims[0]) - *(s-dims[0]);
double v = dx*dx + dy*dy;
// second color channel
s += dims[0]*dims[1];
double dy2 = *(s+1) - *(s-1);
double dx2 = *(s+dims[0]) - *(s-dims[0]);
double v2 = dx2*dx2 + dy2*dy2;
// third color channel
s += dims[0]*dims[1];
double dy3 = *(s+1) - *(s-1);
double dx3 = *(s+dims[0]) - *(s-dims[0]);
double v3 = dx3*dx3 + dy3*dy3;
// pick channel with strongest gradient
if (v2 > v) {
v = v2;
dx = dx2;
dy = dy2;
}
if (v3 > v) {
v = v3;
dx = dx3;
dy = dy3;
}
//找到当前的梯度应该投影到那个bin,[0, 2xPI]总共18个bin
//最后写这里是如何找到最合适的bin,这是快速近似算法
// snap to one of 18 orientations
double best_dot = 0;
int best_o = 0;
for (int o = 0; o < 9; o++) {
double dot = uu[o]*dx + vv[o]*dy;
if (dot > best_dot) {
best_dot = dot;
best_o = o;
} else if (-dot > best_dot) {
best_dot = -dot;
best_o = o+9;
}
}
//下边这几行代码就是用来线性插值的,注意这里没有使用三线性插值和原始HOG不一样
//省略了梯度的插值
// add to 4 histograms around pixel using linear interpolation
double xp = ((double)x+0.5)/(double)sbin - 0.5;
double yp = ((double)y+0.5)/(double)sbin - 0.5;
int ixp = (int)floor(xp);
int iyp = (int)floor(yp);
double vx0 = xp-ixp;
double vy0 = yp-iyp;
double vx1 = 1.0-vx0;
double vy1 = 1.0-vy0;
v = sqrt(v);
//当前像素对左下角cell有贡献
//hist + ixp*blocks[0] + iyp -- 右下角cell的位置
//blocks[0]*blocks[1] -- 一页大小
//best_o*blocks[0]*blocks[1] -- 最合适的梯度坐在页
if (ixp >= 0 && iyp >= 0) {
*(hist + ixp*blocks[0] + iyp + best_o*blocks[0]*blocks[1]) +=
vx1*vy1*v;
}
//当前像素对下方cell有贡献
if (ixp+1 < blocks[1] && iyp >= 0) {
*(hist + (ixp+1)*blocks[0] + iyp + best_o*blocks[0]*blocks[1]) +=
vx0*vy1*v;
}
//当前像素对左边cell有贡献
if (ixp >= 0 && iyp+1 < blocks[0]) {
*(hist + ixp*blocks[0] + (iyp+1) + best_o*blocks[0]*blocks[1]) +=
vx1*vy0*v;
}
//当前像素对所在cell有贡献
if (ixp+1 < blocks[1] && iyp+1 < blocks[0]) {
*(hist + (ixp+1)*blocks[0] + (iyp+1) + best_o*blocks[0]*blocks[1]) +=
vx0*vy0*v;
}
//关于这一点之前的HOG特征分析中有,只不过这里是直接对附近的cell贡献,原始的HOG是对Block,原理是一样的根据空间距离插值
}
}
// compute energy in each block by summing over orientations
// energy 不晓得应该怎么翻译,这里是计算归一化因子的
// 因为上边是把[0, 2PI]分为18个方向,举个例子10度和190度算作两个方向
// 这里归一化的时候要把10度和190度两个方向算作一个方向,因此要加在一起然后求平方
// norm是blocks[0]*blocks[1]大小的,每一个位置存的是所有梯度方向的平方和
for (int o = 0; o < 9; o++) {
float *src1 = hist + o*blocks[0]*blocks[1];
float *src2 = hist + (o+9)*blocks[0]*blocks[1];
float *dst = norm;
float *end = norm + blocks[1]*blocks[0];
while (dst < end) {
*(dst++) += (*src1 + *src2) * (*src1 + *src2);
src1++;
src2++;
}
}
// compute features
//计算特征,out[0] = blocks[0] - 2, out[1] = blocks[1] - 2; 防止越界
for (int x = 0; x < out[1]; x++) {
for (int y = 0; y < out[0]; y++) {
float *dst = feat + x*out[0] + y;
float *src, *p, n1, n2, n3, n4;
//根据上边计算出的energy求出归一化因子
//每个cell分属四个block(这个block是2x2个cell的那个block!表混淆),因此要归一化四次,下边就是求四个归一化因子
p = norm + (x+1)*blocks[0] + y+1;
n1 = 1.0 / sqrt(*p + *(p+1) + *(p+blocks[0]) + *(p+blocks[0]+1) + eps);
p = norm + (x+1)*blocks[0] + y;
n2 = 1.0 / sqrt(*p + *(p+1) + *(p+blocks[0]) + *(p+blocks[0]+1) + eps);
p = norm + x*blocks[0] + y+1;
n3 = 1.0 / sqrt(*p + *(p+1) + *(p+blocks[0]) + *(p+blocks[0]+1) + eps);
p = norm + x*blocks[0] + y;
n4 = 1.0 / sqrt(*p + *(p+1) + *(p+blocks[0]) + *(p+blocks[0]+1) + eps);
float t1 = 0;
float t2 = 0;
float t3 = 0;
float t4 = 0;
// contrast-sensitive features
//这里把18个方向作为18个特征,也就是10度和190度是不同的特征
src = hist + (x+1)*blocks[0] + (y+1);
for (int o = 0; o < 18; o++) {
float h1 = min(*src * n1, 0.2);//clip, 大于0.2的特征值截断
float h2 = min(*src * n2, 0.2);
float h3 = min(*src * n3, 0.2);
float h4 = min(*src * n4, 0.2);
*dst = 0.5 * (h1 + h2 + h3 + h4);//四个归一化之后的特征值求和除以2,为什么?请看论文
t1 += h1;//当前cell所在的四个block归一化后的特征值分别加起来
t2 += h2;
t3 += h3;
t4 += h4;
dst += out[0]*out[1];
src += blocks[0]*blocks[1];
}
// contrast-insensitive features
//这里把10度和190度算作一个特征,所以要求一个sum然后再归一化四次
src = hist + (x+1)*blocks[0] + (y+1);
for (int o = 0; o < 9; o++) {
float sum = *src + *(src + 9*blocks[0]*blocks[1]);
float h1 = min(sum * n1, 0.2);
float h2 = min(sum * n2, 0.2);
float h3 = min(sum * n3, 0.2);
float h4 = min(sum * n4, 0.2);
*dst = 0.5 * (h1 + h2 + h3 + h4);
dst += out[0]*out[1];
src += blocks[0]*blocks[1];
}
// texture features
//纹理特征,cell所在的四个block的特征值的和乘以一个系数???
*dst = 0.2357 * t1;
dst += out[0]*out[1];
*dst = 0.2357 * t2;
dst += out[0]*out[1];
*dst = 0.2357 * t3;
dst += out[0]*out[1];
*dst = 0.2357 * t4;
// truncation feature
//最后一个特征是0,
dst += out[0]*out[1];
*dst = 0;
}
}
mxFree(hist);
mxFree(norm);
return mxfeat;
}
// matlab entry point
// F = features(image, bin)
// image should be color with double values
void mexFunction(int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) {
if (nrhs != 2)
mexErrMsgTxt("Wrong number of inputs");
if (nlhs != 1)
mexErrMsgTxt("Wrong number of outputs");
plhs[0] = process(prhs[0], prhs[1]);
}
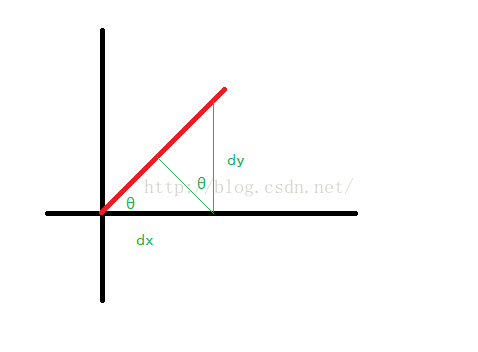
上边红线的长度可以用cos(theta)*dx + sin(theta)*dy表示
代码中从[0,pi]一个一个试找到最大的那个长度,这个角度就是最接近theta的角度
dx, dy可能小于0,长度也可能是负的,因此代码中把角度从【0,pi】扩展到【0,2pi】共18个方向
以上理解的有问题欢迎联系我
zhangyaocold@gmail.com
我前几天写的HOG特征分析怎么没了, F.U.C.K......














 1210
1210











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









