







以前一直想做个足式机器人,考虑到两足机器人难度太大,想平衡都难,而6足机器人做起来没什么挑战,同时最近Boston Dymanics的mini or max dog很火,所以也就来搞个四足玩玩。
做之前先看别人都怎么做的,在youtube上找了几个视频,感觉很有启发,先贴上来一起看看:
1、波士顿小狗不得不拿出来先看看,这个不像大狗用柴油机液压泵,已经用上电驱动了,能做个安静的小狗了:Introducing SpotMini
2、 ETH Zurich's Autonomous Systems Lab这个实验室发了个视频,直接讲四足机器人结构怎么做,很受用,是哺乳动物类四足,不是爬行动物类四足,二者差别还是挺大的: Microlecture - How to Engineer a Dog
3、最近上海大学一个硕士研究生也做了个XDog,感觉很不错,不过每条腿好像只有两个自由度,走起来不像spotMini那么自然:XDog: Small and Low-cost Four Legged Robot ( Hello World )
参考上面做得不错的几个方案,决定选用每条腿3个自由度的方案,如果用2自由度,反而结构上会复杂一些,毕竟要做个收腿的结构。那就12个舵机堆起来吧,用的是MG995舵机。
首先搞亚克力板做了个比较大的,上电后发现亚克力板刚度不够,腿太长了,舵机也把自己抬不起来,跪了,然后又重新切板子,用木板做了个小的,重新拧螺丝,搞了一晚上。

小狗加强版来咯

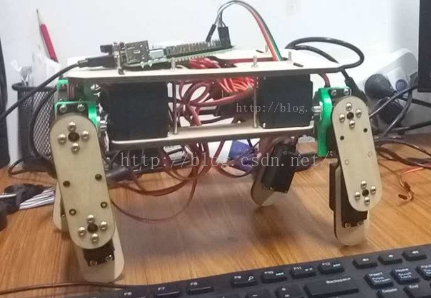
结构和执行器都有了,就差控制器了和传感器了。现在采用的控制器是raspberry Pi 3b,用Python编程,大大提高了开发效率,然后再搞他I2C通信的舵机驱动板,简直不能更方便;机身反馈用MPU6050,不过还没开始做反馈;足底触地反馈,计划搞个微动开关,把小腿做复杂点,开关集成进行,再搞个大磅数弹簧减振,也还没做。
视频马上来,由于电源功率不够,导致舵机力矩不足,现在还不是mobile模式,还得拖个电源线给舵机和树莓派供电















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









