










* ServiceManager,这是Android OS的整个服务的管理程序
* MediaService,这个程序里边注册了提供媒体播放的服务程序MediaPlayerService,我们最后只分析这个
* MediaPlayerClient,这个是与MediaPlayerService交互的客户端程序
using namespace android;
int main(int argc __unused, char** argv)
{
// 获取一个ProcessState实例
sp<ProcessState> proc(ProcessState::self());
// 一个ServiceManager实例
sp<IServiceManager> sm = defaultServiceManager();
/** 启动一些所需的Service服务**/
AudioFlinger::instantiate();
MediaPlayerService::instantiate();// 初始化MediaPlayerService服务
CameraService::instantiate();
AudioPolicyService::instantiate();
SoundTriggerHwService::instantiate();
registerExtensions();
// ProcessState开辟线程池
ProcessState::self()->startThreadPool();
// IPCThreadState加入到线程池
IPCThreadState::self()->joinThreadPool();
}sp是Android中的智能指针,用以管理对象生命周期;上面涉及到的函数一一来看:
/** \frameworks\native\libs\binder\ProcessState.cpp
* 2.3在framework\base\libs\binder\ProcessState.cpp*/
// 很明显的单例模式
sp<ProcessState> ProcessState::self()
{
Mutex::Autolock _l(gProcessMutex);
if (gProcess != NULL) {
return gProcess;
}
gProcess = new ProcessState;
return gProcess;
}
ProcessState::ProcessState()
: mDriverFD(open_driver()) // 注意不要忽略这里,在参数初始化时使用open_driver来打开Binder驱动
, mVMStart(MAP_FAILED)
, mManagesContexts(false)
, mBinderContextCheckFunc(NULL)
, mBinderContextUserData(NULL)
, mThreadPoolStarted(false)
, mThreadPoolSeq(1)
{
if (mDriverFD >= 0) {
#if !defined(HAVE_WIN32_IPC)
// mmap 把指定内存块(这里即mDriverFD)映射到应用程序的内存空间中
mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
if (mVMStart == MAP_FAILED) {
//...差错控制
}
#else
mDriverFD = -1;
#endif
}
LOG_ALWAYS_FATAL_IF(mDriverFD < 0, "Binder driver could not be opened. Terminating.");
}static int open_driver()
{
int fd = open("/dev/binder", O_RDWR); // RW方式打开/dev/binder设备,具体打开信息暂时不关注
if (fd >= 0) {
fcntl(fd, F_SETFD, FD_CLOEXEC);
int vers = 0;
// 与Binder驱动通信正是使用ioctl函数来实现
status_t result = ioctl(fd, BINDER_VERSION, &vers); // 获取Binder版本
...
size_t maxThreads = 15;
result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads); // 设置Binder线程池最大线程数(这里为15)
...
} else {
...
}
return fd;
}/** \frameworks\native\libs\binder\IServiceManager.cpp*/
sp<IServiceManager> defaultServiceManager()
{
// 也是单例模式
if (gDefaultServiceManager != NULL) return gDefaultServiceManager;
{
AutoMutex _l(gDefaultServiceManagerLock);
while (gDefaultServiceManager == NULL) {
// 创建一个ServiceManager,可以看出又回到ProcessState中调用getContextObject函数
gDefaultServiceManager = interface_cast<IServiceManager>(
ProcessState::self()->getContextObject(NULL));
if (gDefaultServiceManager == NULL)
sleep(1);
}
}
return gDefaultServiceManager;
}/** \frameworks\native\libs\binder\ProcessState.cpp */
sp<IBinder> ProcessState::getContextObject(const sp<IBinder>& /*caller*/)
{
// 字面上翻译为通过Handle值来获得Proxy代理
return getStrongProxyForHandle(0);
}
sp<IBinder> ProcessState::getStrongProxyForHandle(int32_t handle)
{
sp<IBinder> result;
AutoMutex _l(mLock);
// 通过handle的值查询获得存储数组中对应的资源handle_entry,如果不存在该hanle,则创建一个;
// 后面附有 lookupHandleLocked的源码:
handle_entry* e = lookupHandleLocked(handle);
/** 看一下获取到的handle_entry的结构,可以看到获取到想要的Binder(IBinder)
* struct handle_entry {
IBinder* binder;--->Binder
RefBase::weakref_type* refs;-->和引用计数相关.
};
* */
if (e != NULL) {
IBinder* b = e->binder; // 由于是新创建的,b明显为NULL
if (b == NULL || !e->refs->attemptIncWeak(this)) {
if (handle == 0) {
// transact是个重要函数,这里暂且不提
Parcel data;
status_t status = IPCThreadState::self()->transact(
0, IBinder::PING_TRANSACTION, data, NULL, 0);
if (status == DEAD_OBJECT)
return NULL;
}
b = new BpBinder(handle);// 根据handle创建一个BpBinder
e->binder = b;
if (b) e->refs = b->getWeakRefs();
result = b;
}
...
}
return result;// 返回的即是new BpBinder(handle)
}
ProcessState::handle_entry* ProcessState::lookupHandleLocked(int32_t handle)
{
const size_t N=mHandleToObject.size();
if (N <= (size_t)handle) {
handle_entry e;
e.binder = NULL;
e.refs = NULL;
status_t err = mHandleToObject.insertAt(e, N, handle+1-N);
if (err < NO_ERROR) return NULL;
}
return &mHandleToObject.editItemAt(handle);
}gDefaultServiceManager = interface_cast<IServiceManager>(new BpBinder(0));
/** \frameworks\native\libs\binder\BpBinder.cpp */
BpBinder::BpBinder(int32_t handle)
: mHandle(handle)
, mAlive(1)
, mObitsSent(0)
, mObituaries(NULL)
{
// 均和引用计数相关,相关知识为智能指针
extendObjectLifetime(OBJECT_LIFETIME_WEAK); // 表示对象的生命周期同时受强引用计数和弱引用计数的影响
IPCThreadState::self()->incWeakHandle(handle); // 这里终于引出了重要的IPCThreadState实例
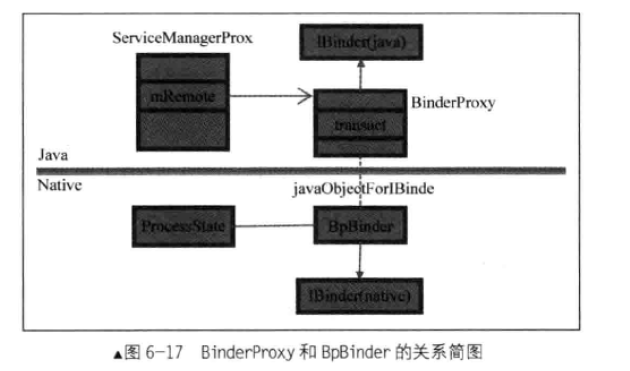
}2、又引出一个重要类——IPCThreadState,明显看出它也是一个单例模式:
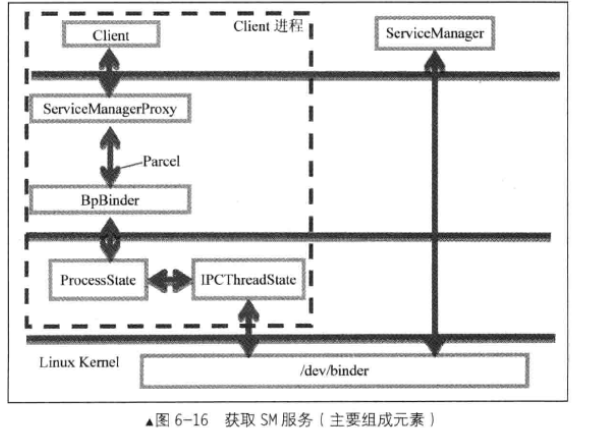
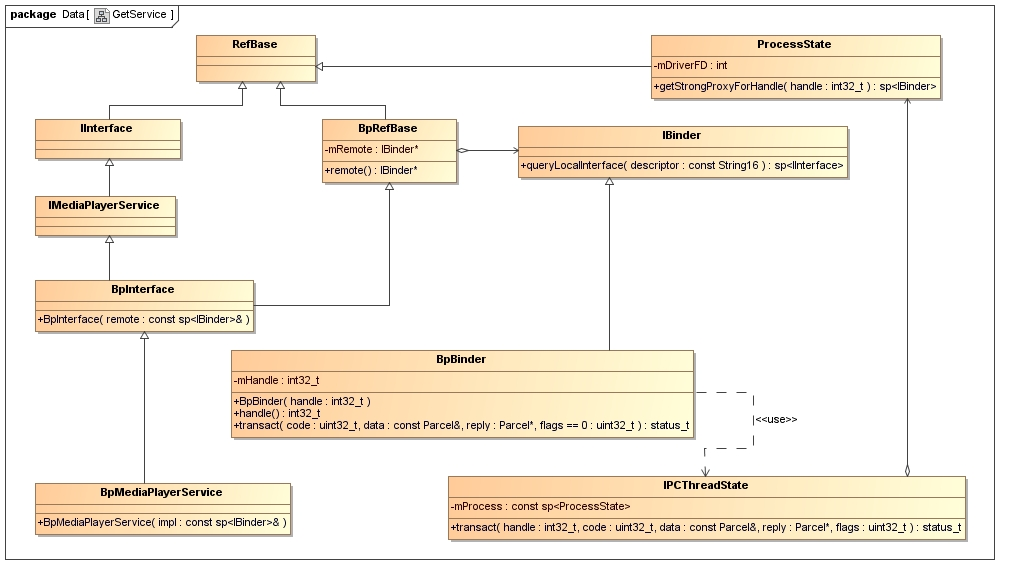
先总结一下获取到的诸多类之间的关系,如下图所示:
/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
IPCThreadState* IPCThreadState::self()
{
/** TLS是Thread Local Storage,(Android中对Java中的TLS进行了优化),
* 作用是保证对象线程唯一,且别的线程访问的只是该线程的对象数据的复本,互不干扰
* Handler,Looper里面也涉及到了该机制,来保证每一个线程Looper唯一**/
if (gHaveTLS) { // 第一次进来为false
restart: // 源码里面好多goto函数啊
const pthread_key_t k = gTLS;
// 通过键值gTLS获取该Thread对应的IPCThreadState
IPCThreadState* st = (IPCThreadState*)pthread_getspecific(k);
//下面即为单例模式
if (st) return st;
returnnew IPCThreadState; // 后面继续进行分析IPCThreadState构造函数
}
if (gShutdown) return NULL;
// 锁保护
pthread_mutex_lock(&gTLSMutex);
if (!gHaveTLS) { // 第一次进来
// TLS机制为对象在该Thread中创建相对应的key gTLS(可以类比一个空的键值对)
if (pthread_key_create(&gTLS, threadDestructor) != 0) {
pthread_mutex_unlock(&gTLSMutex);
return NULL;
}
gHaveTLS = true;
}
pthread_mutex_unlock(&gTLSMutex);
goto restart; // goto:创建完key后,然后跳回上面
}IPCThreadState::IPCThreadState()
: mProcess(ProcessState::self()), // 看到这里与ProcessState实例联系到一起(ProcessState是进程唯一的)
mMyThreadId(androidGetTid()), // 设置Thread ID
mStrictModePolicy(0),
mLastTransactionBinderFlags(0)
{
pthread_setspecific(gTLS, this); // TLS机制,存储键值对
clearCaller();
/** mIn, mOut是两个Parcel,用于存储接收/发送给BD的命令数据的
* 这里最大容量设置为了256
*
* mIn,mOut数据结构中几个重要内部变量:
* mData指向内存地址,表示Parcel所包含数据在内存中的起始地址
* mDataSize指当前parcel已经有的数据量
* mDataPos指当前已经处理过得数据量
* 其具体内存中的关系如下面附图所示:
* */
mIn.setDataCapacity(256);
mOut.setDataCapacity(256);
}
/** \frameworks\native\include\binder\IInterface.h*/
template<typename INTERFACE>
inline sp<INTERFACE> interface_cast(const sp<IBinder>& obj)
{
return INTERFACE::asInterface(obj);
}
// 可见是一个模板类,将INTERFACE换为IServiceManager可得:
inline sp<IServiceManager> interface_cast(const sp<IBinder>& obj)
{
return IServiceManager::asInterface(obj);
}
/** \frameworks\native\include\binder\IServiceManager.h*/
namespace android {
class IServiceManager : public IInterface
{
public:
/** 学习过MFC知道,由DECLARE就会有相应的IMPLEMENT,
* 这两个宏一个声明在.h中,一个声明在.cpp中*/
DECLARE_META_INTERFACE(ServiceManager);
/**
* Register a service.
*/
virtual status_t addService( const String16& name,
const sp<IBinder>& service,
bool allowIsolated = false) = 0;
....
};
/** \frameworks\native\libs\binder\IServiceManager.cpp*/
IMPLEMENT_META_INTERFACE(ServiceManager, "android.os.IServiceManager");
/** \frameworks\native\include\binder\IInterface.h*/
#define DECLARE_META_INTERFACE(INTERFACE) \
static const android::String16 descriptor; \
static android::sp<I##INTERFACE> asInterface( \
const android::sp<android::IBinder>& obj); \
virtual const android::String16& getInterfaceDescriptor() const; \
I##INTERFACE(); \
virtual ~I##INTERFACE(); \
在IServiceManager的应用环境下,调用为:DECLARE_META_INTERFACE(ServiceManager);
则上面宏可以修改为函数:
static const android::String16 descriptor; // -->增加一个描述字符串
static android::sp< IServiceManager > asInterface(
const android::sp<android::IBinder>&obj) // --》增加一个asInterface函数
virtual const android::String16& getInterfaceDescriptor() const; // --》增加一个get函数,估计其返回值就是descriptor这个字符串
// 增加构造函数和析构函数
IServiceManager (); \
virtual~IServiceManager();2)IMPLEMENT_META_INTERFACE:
/** \frameworks\native\include\binder\IInterface.h*/
#define IMPLEMENT_META_INTERFACE(INTERFACE, NAME) \
const android::String16 I##INTERFACE::descriptor(NAME); \
const android::String16& \
I##INTERFACE::getInterfaceDescriptor() const { \
return I##INTERFACE::descriptor; \
} \
android::sp<I##INTERFACE> I##INTERFACE::asInterface( \
const android::sp<android::IBinder>& obj) \
{ \
android::sp<I##INTERFACE> intr; \
if (obj != NULL) { \
intr = static_cast<I##INTERFACE*>( \
obj->queryLocalInterface( \
I##INTERFACE::descriptor).get()); \
if (intr == NULL) { \
intr = new Bp##INTERFACE(obj); \
} \
} \
return intr; \
} \
I##INTERFACE::I##INTERFACE() { } \
I##INTERFACE::~I##INTERFACE() { } \由调用:IMPLEMENT_META_INTERFACE(ServiceManager, "android.os.IServiceManager");
如上转化为函数实现为:
const android::String16 IServiceManager::descriptor("android.os.IServiceManager");
const android::String16& IServiceManager::getInterfaceDescriptor() const
{
return IServiceManager::descriptor; //返回上面那个android.os.IServiceManager
}
/** 这里清晰得获取到了所需要的asInterface函数**/
android::sp<IServiceManager> IServiceManager::asInterface(const android::sp<android::IBinder>& obj)
{
android::sp <IServiceManager> intr;
if (obj != NULL) {
intr = static_cast<IServiceManager *>(
obj->queryLocalInterface(IServiceManager::descriptor).get());
if (intr == NULL) {
// 这里创建了一个新的类实例 BpServiceManager
intr = new BpServiceManager(obj);
}
}
return intr;
}
IServiceManager::IServiceManager() {}
IServiceManager::~IServiceManager() {}static_cast<IServiceManager *>(new BpServiceManager(new BpBinder(0)))
/** \frameworks\native\libs\binder\IServiceManager.cpp*/
// ----------------------------------------------------------------------
/** 由后面给出的BpInterface的定义可以,BpInterface是继承INTERFACE(即这里的IServiceManager),
* 可以知道BpServiceManager是继承BpInterface与IServiceManager的*/
class BpServiceManager : public BpInterface<IServiceManager>
{
public:
// 这里构造函数为空,可知均交给父类去处理了,转而去看一下BpInterface的构造函数
BpServiceManager(const sp<IBinder>& impl)
: BpInterface<IServiceManager>(impl)
{
}
/*** 这里重写了IServiceManager中的一些Service函数,具体细节暂且不提,记住有这些函数
* 之案件的数据通信等具体情况时再做分析**/
virtual sp<IBinder> getService(const String16& name) const
{
unsigned n;
for (n = 0; n < 5; n++){
sp<IBinder> svc = checkService(name);
if (svc != NULL) return svc;
sleep(1);
}
return NULL;
}
virtual sp<IBinder> checkService(const String16& name) const
{
Parcel data, reply;
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name);
remote()->transact(CHECK_SERVICE_TRANSACTION, data, &reply);
return reply.readStrongBinder();
}
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated)
{
Parcel data, reply;
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name);
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode() : err;
}
virtual Vector<String16> listServices()
{
Vector<String16> res;
int n = 0;
for (;;) {
Parcel data, reply;
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeInt32(n++);
status_t err = remote()->transact(LIST_SERVICES_TRANSACTION, data, &reply);
if (err != NO_ERROR)
break;
res.add(reply.readString16());
}
return res;
}
};
/** \frameworks\native\include\binder\IInterface.h*/
template<typename INTERFACE>
class BpInterface : public INTERFACE, public BpRefBase
{
public:
BpInterface(constsp<IBinder>& remote);
protected:
virtual IBinder* onAsBinder();
};/** \frameworks\native\include\binder\IInterface.h*/
template<typename INTERFACE>
inline BpInterface<INTERFACE>::BpInterface(const sp<IBinder>& remote)
: BpRefBase(remote)
// 这里是委托构造函数,委托父类 BpRefBase去实例化(注这里的IBinder又换成了名字remote)
{
}
template<typenameINTERFACE>
inline IBinder* BpInterface<INTERFACE>::onAsBinder()
{
// 从前面就一直出现的remote()函数一直没看到定义,可以想到一定是定义在父类BpRefBase中
return remote();
}/** \frameworks\native\include\binder\Binder.h*/
// 看到其果然继承了RefBase,表示其与智能指针相关
class BpRefBase : public virtual RefBase
{
protected:
// 用到的构造函数
BpRefBase(const sp<IBinder>& o);
virtual ~BpRefBase();
virtual void onFirstRef();
virtual void onLastStrongRef(constvoid* id);
virtual bool onIncStrongAttempted(uint32_t flags, constvoid* id);
// 一直在寻找的remote()函数
inline IBinder* remote() { return mRemote; }
inline IBinder* remote() const { return mRemote; }
private:
BpRefBase(constBpRefBase& o);
BpRefBase& operator=(constBpRefBase& o);
IBinder* const mRemote; // 可以看到返回的依然是IBinder
RefBase::weakref_type* mRefs;
volatile int32_t mState;
};
/** \frameworks\native\libs\binder\Binder.cpp*/
BpRefBase::BpRefBase(const sp<IBinder>& o)
: mRemote(o.get()), mRefs(NULL), mState(0) // 在这个构造函数中对返回值mRemote进行了初始化
/** o是sp<IBinder>类型,是智能指针,get是智能指针获取其中实际类型的方法,即这里是用以获取IBinder*/
{
/** 与智能指针相关操作*/
extendObjectLifetime(OBJECT_LIFETIME_WEAK);
if (mRemote) {
mRemote->incStrong(this); // Removed on first IncStrong().
mRefs = mRemote->createWeak(this); // Held for our entire lifetime.
}
}gDefaultServiceManager = static_cast<IServiceManager *>(new BpServiceManager(new BpBinder(0)))
/** \frameworks\av\media\mediaserver\main_mediaserver.cpp*/
int main(int argc __unused, char** argv)
{
// 获取一个ProcessState实例
sp<ProcessState> proc(ProcessState::self());
// 一个ServiceManager实例
sp<IServiceManager> sm = defaultServiceManager();
/** 启动一些所需的Service服务**/
AudioFlinger::instantiate();
MediaPlayerService::instantiate();// 初始化MediaPlayerService服务
CameraService::instantiate();
AudioPolicyService::instantiate();
SoundTriggerHwService::instantiate();
registerExtensions();
// ProcessState开辟线程池
ProcessState::self()->startThreadPool();
// IPCThreadState加入到线程池
IPCThreadState::self()->joinThreadPool();
}
/** \frameworks\av\media\libmediaplayerservice\MediaPlayerService.cpp*/
void MediaPlayerService::instantiate() {
defaultServiceManager()->addService(
String16("media.player"), new MediaPlayerService());
}
/** \frameworks\av\media\libmediaplayerservice\MediaPlayerService.cpp*/
MediaPlayerService::MediaPlayerService()
{
ALOGV("MediaPlayerService created");
mNextConnId = 1;
/** 下面是电源管理相关的操作,暂且不看**/
mBatteryAudio.refCount = 0;
for (int i = 0; i < NUM_AUDIO_DEVICES; i++) {
mBatteryAudio.deviceOn[i] = 0;
mBatteryAudio.lastTime[i] = 0;
mBatteryAudio.totalTime[i] = 0;
}
// speaker is on by default
mBatteryAudio.deviceOn[SPEAKER] = 1;
// reset battery stats
// if the mediaserver has crashed, battery stats could be left
// in bad state, reset the state upon service start.
const sp<IServiceManager> sm(defaultServiceManager());
if (sm != NULL) {
const String16 name("batterystats");
sp<IBatteryStats> batteryStats =
interface_cast<IBatteryStats>(sm->getService(name));
if (batteryStats != NULL) {
batteryStats->noteResetVideo();
batteryStats->noteResetAudio();
}
}
MediaPlayerFactory::registerBuiltinFactories();
}/** \frameworks\av\media\libmediaplayerservice\MediaPlayerService.h*/
class MediaPlayerService : public BnMediaPlayerService/** \frameworks\native\libs\binder\IServiceManager.cpp*/
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated)
{
/** 这里只是SM的代理,要处理具体的事务明显应该还是有对应的Bn端存在
* data(Parcel)则是发送给BnServiceManager的数据包*/
Parcel data, reply;
// 将IServiceManager的描述符即"android.os.IServiceManager"写入data
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
// name即Service的名称
data.writeString16(name);
// 将service实体添加进来(这个情景下即是BnMediaPlayerService)
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
// 前面分析的remote即是创建的BpBinder,这里会调用其transact来发送数据,并将返回数据保存到reply中
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode() : err;
}
/** \frameworks\native\libs\binder\BpBinder.cpp*/
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
// Once a binder has died, it will never come back to life.
if (mAlive) {
// 可以看到BpBinder是调用前面提到的IPCThreadState的transact函数来实现通信的
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
// data 即是前面BpServiceManager发送来的parcel data,首先对其进行错误监测
status_t err = data.errorCheck();
flags |= TF_ACCEPT_FDS;
...
if (err == NO_ERROR) {
/** transact首先要整理数据,通过writeTransactionData来完成,将其
* 打包成Binder驱动协议规定的格式
* 注意这里并未发送数据,只是整理数据*/
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
...
if ((flags & TF_ONE_WAY) == 0) { // 表示是同步事务的情况
...
if (reply) {
// 这是是等到响应,故发送命令应该在这里实现
err = waitForResponse(reply);
} else {
Parcel fakeReply; // reply为空的话,就初始化一个假的Parcel供使用
err = waitForResponse(&fakeReply);
}
...
} else { // 异步事务
err = waitForResponse(NULL, NULL);
}
return err;
}这里又引出两个函数:
/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
// 这是前面Binder基础数据结构中提到的事务数据结构binder_transaction_data
binder_transaction_data tr;
// 可以看到下面都是对该结构进行初始化及填充
tr.target.ptr = 0; /* Don't pass uninitialized stack data to a remote process */
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
} elseif (statusBuffer) {
tr.flags |= TF_STATUS_CODE;
*statusBuffer = err;
tr.data_size = sizeof(status_t);
tr.data.ptr.buffer = reinterpret_cast<uintptr_t>(statusBuffer);
tr.offsets_size = 0;
tr.data.ptr.offsets = 0;
} else {
return (mLastError = err);
}
// 填充好数据后将数据写入到mOut缓冲区中,mOut是个Parcel前面已经提到过
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
}/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
int32_t cmd;
int32_t err;
while (1) {
// talkWithDriver,名称就可以看出是与Driver进行交互
if ((err=talkWithDriver()) < NO_ERROR) break;
err = mIn.errorCheck();
if (err < NO_ERROR) break;
// 从binder驱动中读取数据存放在mIn中,这里则进行等待读取
if (mIn.dataAvail() == 0) continue;
// mIn输入缓冲区,读取一个返回cmd命令
cmd = mIn.readInt32();
...
// 下面是针对返回命令进行相应操作
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
...
}
}
...
return err;
}
/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
/** 注意这里的mProcess,由IPCThreadState构造函数中初始化,
* mProcess(ProcessState::self())
* mProcess即是ProcessState*/
if (mProcess->mDriverFD <= 0) { // 先判断Binder设备是否已经打开
return -EBADF;
}
//
binder_write_read bwr; // 描述进程间通信过程中所传输的数据,读写操作都是使用该结构
/*** 处理读取mIn缓冲区中的数据,然后赋值给bwr*/
// 由前面给出的mIn数据处理示意图,可以得出这里实在判断是否还需要进行读取
constbool needRead = mIn.dataPosition() >= mIn.dataSize();
/** 只有doReceive为true(表示调用者希望被读取),且needRead为false(由前式知道false表示需要读取mIn),
* 此时outAvail为0,表示不能去写mOut*/
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
// 填写需要wirte的内容和大小
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// 填写需要read的大小及地址
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
// 明显表示不需要read,也不需要write,则直接返回
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
// 初始化
bwr.write_consumed = 0; // 记录从缓冲区取了多少字节的数据
bwr.read_consumed = 0; // 从read_buffer中读取的数据量
status_t err;
do {
#if defined(HAVE_ANDROID_OS)
/** 前面介绍到与binder驱动进行通信使用ioctl函数,BINDER_WRITE_READ用以读写数据,操作的Binder则是mDriverFD*/
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
#else
err = INVALID_OPERATION;
#endif
if (mProcess->mDriverFD <= 0) {
err = -EBADF;
}
} while (err == -EINTR);
/** 通信完成后,对mIn与mOut做善后处理*/
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
return NO_ERROR;
}
return err;
}
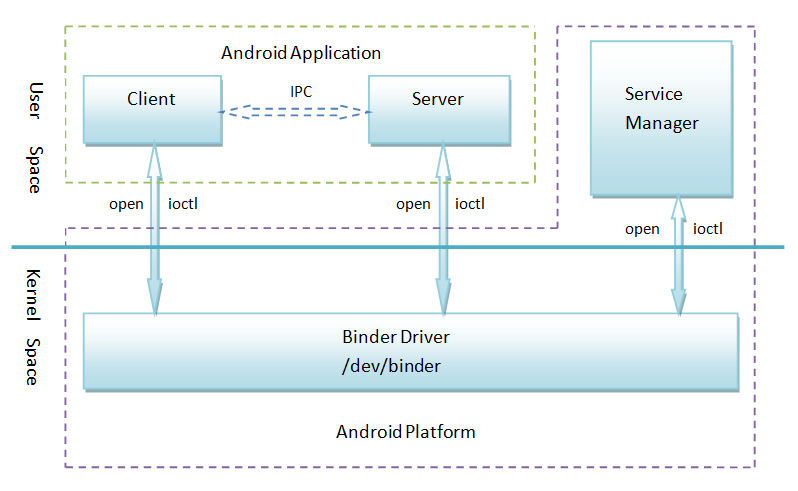
Android系统中Service信息都是先add到ServiceManager中,由ServiceManager来集中管理,这样就可以查询当前系统有哪些服务。而且,Android系统中某个服务例如MediaPlayerService的客户端Client想要和MediaPlayerService通讯的话,必须先向ServiceManager查询MediaPlayerService的信息,然后通过ServiceManager返回的东西再来和MediaPlayerService交互。
毕竟,要是MediaPlayerService身体不好,老是挂掉的话,客户的代码就麻烦了,就不知道后续新生的MediaPlayerService的信息了,所以只能这样:
* MediaPlayerService向SM注册
* MediaPlayerClient查询当前注册在SM中的MediaPlayerService的信息
* 根据这个信息,MediaPlayerClient和MediaPlayerService交互
另外,ServiceManager的handle标示是0,所以只要往handle是0的服务发送消息了,最终都会被传递到ServiceManager中去。
/* \frameworks\av\include\media\IMediaPlayerService.h*/
class BnMediaPlayerService: public BnInterface<IMediaPlayerService>
{
public:
virtual status_t onTransact( uint32_t code,
const Parcel& data,
Parcel* reply,
uint32_t flags = 0);
};
}; // namespace android/* \frameworks\native\include\binder\IInterface.h*/
template<typename INTERFACE>
class BnInterface : public INTERFACE, public BBinder
{
public:
virtual sp<IInterface> queryLocalInterface(constString16& _descriptor);
virtual const String16& getInterfaceDescriptor() const;
protected:
virtual IBinder* onAsBinder();
};
/** \frameworks\native\include\binder\Binder.h*/
class BBinder : public IBinder
{
public:
BBinder();
virtual const String16& getInterfaceDescriptor() const;
virtual bool isBinderAlive() const;
virtual status_t pingBinder();
virtual status_t dump(int fd, const Vector<String16>& args);
virtual status_t transact( uint32_t code,
const Parcel& data,
Parcel* reply,
uint32_t flags = 0);
virtual status_t linkToDeath(const sp<DeathRecipient>& recipient,
void* cookie = NULL,
uint32_t flags = 0);
virtual status_t unlinkToDeath( const wp<DeathRecipient>& recipient,
void* cookie = NULL,
uint32_t flags = 0,
wp<DeathRecipient>* outRecipient = NULL);
virtual void attachObject( const void* objectID,
void* object,
void* cleanupCookie,
object_cleanup_func func);
virtual void* findObject(const void* objectID) const;
virtual void detachObject(const void* objectID);
virtual BBinder* localBinder();
protected:
virtual ~BBinder();
virtual status_t onTransact( uint32_t code,
const Parcel& data,
Parcel* reply,
uint32_t flags = 0);
private:
BBinder(const BBinder& o);
BBinder& operator=(const BBinder& o);
class Extras;
atomic_uintptr_t mExtras; // should be atomic<Extras *>
void* mReserved0;
};
除了看到几个函数,没什么参考价值,进而看一下其构造函数:
/** \frameworks\native\libs\binder\Binder.cpp*/
class BBinder::Extras
{
public:
Mutex mLock;
BpBinder::ObjectManager mObjects;
};
// ---------------------------------------------------------------------------
BBinder::BBinder()
{
atomic_init(&mExtras, 0);
}/** \frameworks\av\media\mediaserver\main_mediaserver.cpp*/
using namespace android;
int main(int argc __unused, char** argv)
{
// 获取一个ProcessState实例
sp<ProcessState> proc(ProcessState::self());
// 一个ServiceManager实例
sp<IServiceManager> sm = defaultServiceManager();
/** 启动一些所需的Service服务**/
AudioFlinger::instantiate();
MediaPlayerService::instantiate();// 初始化MediaPlayerService服务
CameraService::instantiate();
AudioPolicyService::instantiate();
SoundTriggerHwService::instantiate();
registerExtensions();
// ProcessState开辟线程池
ProcessState::self()->startThreadPool();
// IPCThreadState加入到线程池
IPCThreadState::self()->joinThreadPool();
}
/** \frameworks\native\libs\binder\ProcessState.cpp*/
void ProcessState::startThreadPool()
{
AutoMutex _l(mLock);
if (!mThreadPoolStarted) {
mThreadPoolStarted = true;
// 引出一个函数
spawnPooledThread(true);
}
}2、spawnPooledThread():
/** \frameworks\native\libs\binder\ProcessState.cpp*/
void ProcessState::spawnPooledThread(bool isMain)
{
if (mThreadPoolStarted) {
String8 name = makeBinderThreadName();
// 创建线程池,然后run
sp<Thread> t = new PoolThread(isMain);
t->run(name.string());
}
}3、再看一下引出的一个重要类PoolThread:
/** \frameworks\native\libs\binder\ProcessState.cpp*/
class PoolThread : public Thread
{
public:
// 构造函数,这里isMain为true
PoolThread(bool isMain)
: mIsMain(isMain)
{
}
protected:
// 这里看到了想要的loop
virtual bool threadLoop()
{
IPCThreadState::self()->joinThreadPool(mIsMain);
return false;
}
const bool mIsMain;
};
/** \system\core\include\utils\Thread.h*/
class Thread : virtual public RefBase
{
public:
// Create a Thread object, but doesn't create or start the associated
// thread. See the run() method.
Thread(bool canCallJava = true);
virtual ~Thread();
// Start the thread in threadLoop() which needs to be implemented.
virtual status_t run( const char* name = 0,
int32_t priority = PRIORITY_DEFAULT,
size_t stack = 0);
// Ask this object's thread to exit. This function is asynchronous, when the
// function returns the thread might still be running. Of course, this
// function can be called from a different thread.
virtual void requestExit();
// Good place to do one-time initializations
virtual status_t readyToRun();
// Call requestExit() and wait until this object's thread exits.
// BE VERY CAREFUL of deadlocks. In particular, it would be silly to call
// this function from this object's thread. Will return WOULD_BLOCK in
// that case.
status_t requestExitAndWait();
// Wait until this object's thread exits. Returns immediately if not yet running.
// Do not call from this object's thread; will return WOULD_BLOCK in that case.
status_t join();
// Indicates whether this thread is running or not.
bool isRunning() const;
#ifdef HAVE_ANDROID_OS
// Return the thread's kernel ID, same as the thread itself calling gettid() or
// androidGetTid(), or -1 if the thread is not running.
pid_t getTid() const;
#endif
protected:
// exitPending() returns true if requestExit() has been called.
bool exitPending() const;
private:
// Derived class must implement threadLoop(). The thread starts its life
// here. There are two ways of using the Thread object:
// 1) loop: if threadLoop() returns true, it will be called again if
// requestExit() wasn't called.
// 2) once: if threadLoop() returns false, the thread will exit upon return.
virtual bool threadLoop() = 0;
private:
Thread& operator=(constThread&);
static int _threadLoop(void* user);
const bool mCanCallJava;
// always hold mLock when reading or writing
thread_id_t mThread;
mutable Mutex mLock;
Condition mThreadExitedCondition;
status_t mStatus;
// note that all accesses of mExitPending and mRunning need to hold mLock
volatile bool mExitPending;
volatile bool mRunning;
sp<Thread> mHoldSelf;
#ifdef HAVE_ANDROID_OS
// legacy for debugging, not used by getTid() as it is set by the child thread
// and so is not initialized until the child reaches that point
pid_t mTid;
#endif
};
/** \system\core\libutils\Threads.cpp*/
Thread::Thread(bool canCallJava)
: mCanCallJava(canCallJava),
mThread(thread_id_t(-1)),
mLock("Thread::mLock"),
mStatus(NO_ERROR),
mExitPending(false), mRunning(false)
#ifdef HAVE_ANDROID_OS
, mTid(-1)
#endif
{
}
/** \system\core\libutils\Threads.cpp*/
status_t Thread::run(const char* name, int32_t priority, size_t stack)
{
Mutex::Autolock _l(mLock);
/** 一系列的初始化操作,忽略**/
if (mRunning) {
return INVALID_OPERATION;
}
mStatus = NO_ERROR;
mExitPending = false;
mThread = thread_id_t(-1);
mHoldSelf = this;
mRunning = true;
bool res;
/*** 创建线程Thread***/
if (mCanCallJava) { //由前面语境知,这里为true
// 很明这里是创建Thread的地方,具体Android是如何封装pthread_create()的,遇见Thread再具体分析
res = createThreadEtc(_threadLoop,
this, name, priority, stack, &mThread);
} else {
res = androidCreateRawThreadEtc(_threadLoop,
this, name, priority, stack, &mThread);
}
/** 创建时失败的错误处理,忽略**/
if (res == false) {
mStatus = UNKNOWN_ERROR; // something happened!
mRunning = false;
mThread = thread_id_t(-1);
mHoldSelf.clear(); // "this" may have gone away after this.
return UNKNOWN_ERROR;
}
return NO_ERROR;
}createThreadEtc定义如下:
inline bool createThreadEtc(thread_func_t entryFunction, void* userData,
const char* threadName = "android:unnamed_thread",
int32_t threadPriority = PRIORITY_DEFAULT,
size_t threadStackSize = 0,
thread_id_t *threadId = 0)
{
return androidCreateThreadEtc(entryFunction, userData, threadName, threadPriority,
threadStackSize, threadId) ? true : false;
}这里创建了新线程,与主线程同时运行,这时就要回到主线程到最初调用的起点,也就是到这里ProcessState::self()->startThreadPool();完成了开辟线程池。下面就要进行IPCThreadState::self()->joinThreadPool();
下面需要分开来看,分别来看子线程与主线程做了什么事情,注意两者是并行的。
(三)Loop循环处理函数
先看新建的子线程:
1、先创建线程的线程函数是_threadLoop函数,如下所示:
/** \system\core\libutils\Threads.cpp*/
int Thread::_threadLoop(void* user)
{
Thread* const self = static_cast<Thread*>(user);
/** 强弱引用计数**/
// mHoldSelf在run中指向了自己(this)
sp<Thread> strong(self->mHoldSelf);
wp<Thread> weak(strong);
self->mHoldSelf.clear();
/** 主要用于测试*/
#ifdef HAVE_ANDROID_OS
self->mTid = gettid();
#endif
bool first = true;
do {
bool result;
/** 第一次执行*/
if (first) {
first = false;
// Good place to do one-time initializations(virtual函数)
self->mStatus = self->readyToRun();
result = (self->mStatus == NO_ERROR);
if (result && !self->exitPending()) {
// Binder threads (and maybe others) rely on threadLoop
// running at least once after a successful ::readyToRun()
// (unless, of course, the thread has already been asked to exit
// at that point).
// This is because threads are essentially used like this:
// (new ThreadSubclass())->run();
// The caller therefore does not retain a strong reference to
// the thread and the thread would simply disappear after the
// successful ::readyToRun() call instead of entering the
// threadLoop at least once.
/*** 注意这里调用了自己的threadLoop函数
* 回到Thread发现threadLoop为virtual函数,则真正调用的PoolThread的
* threadLoop函数**/
result = self->threadLoop();
}
} else { /** 非再次执行则无需再做检测*/
result = self->threadLoop();
}
/** 下面的事情与主线无关,不再关心**/
// establish a scope for mLock
{
Mutex::Autolock _l(self->mLock);
if (result == false || self->mExitPending) {
self->mExitPending = true;
self->mRunning = false;
// clear thread ID so that requestExitAndWait() does not exit if
// called by a new thread using the same thread ID as this one.
self->mThread = thread_id_t(-1);
// note that interested observers blocked in requestExitAndWait are
// awoken by broadcast, but blocked on mLock until break exits scope
self->mThreadExitedCondition.broadcast();
break;
}
}
// Release our strong reference, to let a chance to the thread
// to die a peaceful death.
strong.clear();
// And immediately, re-acquire a strong reference for the next loop
strong = weak.promote();
} while(strong != 0);
return 0;
}/** \frameworks\native\libs\binder\ProcessState.cpp*/
virtual bool threadLoop()
{
/** 竟然也调用了joinThreadPool,这个语境下mIsMain为true*/
IPCThreadState::self()->joinThreadPool(mIsMain);
return false;
}************************************第五步*************************************************
/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
void IPCThreadState::joinThreadPool(bool isMain)
{
/* Binder驱动程序请求进程注册一个线程到它的线程池中,新建立线程会使用BC_REGISTER_LOOPER来通知Binder其准备就绪
BC_REGISTER_LOOPER = _IO('c', 11),
一个线程自己注册到Binder驱动程序后,会使用BC_ENTER_LOOPER通知Binder其准备就绪
BC_ENTER_LOOPER = _IO('c', 12),**/
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
// 设置线程为前台线程
set_sched_policy(mMyThreadId, SP_FOREGROUND);
status_t result;
/********这里可以看到是一个很明显的while循环处理函数************/
do {
// 准备工作,修改强弱引用计数
processPendingDerefs();
// 代码最终的主体在这里
result = getAndExecuteCommand();
// 下面是差错控制
if (result < NO_ERROR && result != TIMED_OUT && result != -ECONNREFUSED && result != -EBADF) {
abort();
}
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
/*** 通知退出,发送数据到binder driver**/
mOut.writeInt32(BC_EXIT_LOOPER);
talkWithDriver(false);
}
// 当完成了对incoming的命令队列的读取,要注意减少对进程的强弱引用计数
void IPCThreadState::processPendingDerefs()
{
if (mIn.dataPosition() >= mIn.dataSize()) {// 表示完成了读取
size_t numPending = mPendingWeakDerefs.size();
if (numPending > 0) {
for (size_t i = 0; i < numPending; i++) {
RefBase::weakref_type* refs = mPendingWeakDerefs[i];
refs->decWeak(mProcess.get());
}
mPendingWeakDerefs.clear();
}
numPending = mPendingStrongDerefs.size();
if (numPending > 0) {
for (size_t i = 0; i < numPending; i++) {
BBinder* obj = mPendingStrongDerefs[i];
obj->decStrong(mProcess.get());
}
mPendingStrongDerefs.clear();
}
}
}
/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
status_t IPCThreadState::getAndExecuteCommand()
{
status_t result;
int32_t cmd;
/** talkWithDriver所做的工作是将mIn于mOut缓冲区的信息写入到
* bwr(binder_write_read)中,通过ioctl函数与binder驱动程序进行通信。*/
result = talkWithDriver();
if (result >= NO_ERROR) {
/** 读取cmd*/
size_t IN = mIn.dataAvail();
if (IN < sizeof(int32_t)) return result;
cmd = mIn.readInt32();
// 真正执行命令的函数又放在了executeCommand
result = executeCommand(cmd);
// After executing the command, ensure that the thread is returned to the
// foreground cgroup before rejoining the pool. The driver takes care of
// restoring the priority, but doesn't do anything with cgroups so we
// need to take care of that here in userspace. Note that we do make
// sure to go in the foreground after executing a transaction, but
// there are other callbacks into user code that could have changed
// our group so we want to make absolutely sure it is put back.
set_sched_policy(mMyThreadId, SP_FOREGROUND);
}
return result;
}/** \frameworks\native\libs\binder\IPCThreadState.cpp*/
status_t IPCThreadState::executeCommand(int32_t cmd)
{
BBinder* obj;
RefBase::weakref_type* refs;
status_t result = NO_ERROR;
/** 总之又是一大串根据命令不同进行相应事件处理,具体情况再去具体分析**/
switch (cmd) {
//...
case BR_TRANSACTION:
{
binder_transaction_data tr;
result = mIn.read(&tr, sizeof(tr));
...
Parcel reply;
status_t error;
if (tr.target.ptr) {
// 前面一系列事件处理暂时不管,这里出现了两个前面介绍过得BBinder类以及transact函数
sp<BBinder> b((BBinder*)tr.cookie);
error = b->transact(tr.code, buffer, &reply, tr.flags);
} else {
error = the_context_object->transact(tr.code, buffer, &reply, tr.flags);
}
...
}
}
return result;
}
/** \frameworks\native\libs\binder\Binder.cpp*/
status_t BBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
data.setDataPosition(0);
status_t err = NO_ERROR;
switch (code) {
case PING_TRANSACTION:
reply->writeInt32(pingBinder());
break;
default:
/*** 重点在于这里,调用了onTransact函数来传递消息**/
err = onTransact(code, data, reply, flags);
break;
}
if (reply != NULL) {
reply->setDataPosition(0);
}
return err;
}
/** \frameworks\av\media\libmedia\IMediaPlayerService.cpp*/
status_t BnMediaPlayerService::onTransact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
/*** 这是对命令进行处理,注意下面处理的共性**/
switch (code) {
case CREATE: {
CHECK_INTERFACE(IMediaPlayerService, data, reply);
sp<IMediaPlayerClient> client =
interface_cast<IMediaPlayerClient>(data.readStrongBinder());
int audioSessionId = data.readInt32();
sp<IMediaPlayer> player = create(client, audioSessionId);
reply->writeStrongBinder(player->asBinder());
return NO_ERROR;
} break;
case DECODE_URL: {
CHECK_INTERFACE(IMediaPlayerService, data, reply);
sp<IMediaHTTPService> httpService;
if (data.readInt32()) {
httpService =
interface_cast<IMediaHTTPService>(data.readStrongBinder());
}
...
return NO_ERROR;
} break;
...
case CREATE_MEDIA_RECORDER: {
CHECK_INTERFACE(IMediaPlayerService, data, reply);
sp<IMediaRecorder> recorder = createMediaRecorder();
reply->writeStrongBinder(recorder->asBinder());
return NO_ERROR;
} break;
case CREATE_METADATA_RETRIEVER: {
CHECK_INTERFACE(IMediaPlayerService, data, reply);
sp<IMediaMetadataRetriever> retriever = createMetadataRetriever();
reply->writeStrongBinder(retriever->asBinder());
return NO_ERROR;
} break;
...
default:
return BBinder::onTransact(code, data, reply, flags);
}
}class MediaPlayerService : public BnMediaPlayerService
virtual sp<IMediaPlayer> create(const sp<IMediaPlayerClient>& client, int audioSessionId);
sp<IMediaPlayerClient> client =
interface_cast<IMediaPlayerClient>(data.readStrongBinder());
引出了正在寻找的MediaPlayerClient.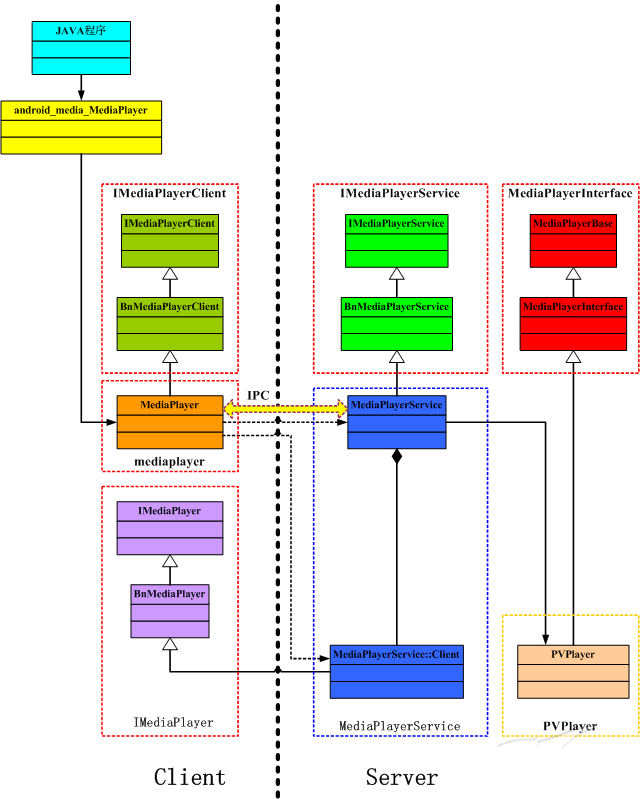
/** \frameworks\av\include\media\mediaplayer.h*/
class MediaPlayer : public BnMediaPlayerClient,
public virtual IMediaDeathNotifiergetMeidaPlayerService,它通过IServiceManager::getService接口来获得MediaPlayerService的远程接口。
/** \frameworks\av\include\media\IMediaDeathNotifier.h*/
class IMediaDeathNotifier: virtual public RefBase
{
public:
...
static const sp<IMediaPlayerService>& getMediaPlayerService();
private:
...
static Mutex sServiceLock;
static sp<IMediaPlayerService> sMediaPlayerService;
static sp<DeathNotifier> sDeathNotifier;
static SortedVector< wp<IMediaDeathNotifier> > sObitRecipients;
};
}; // namespace android
/** \frameworks\av\include\media\mediaplayer.cpp*/
status_t MediaPlayer::setDataSource(int fd, int64_t offset, int64_t length)
{
status_t err = UNKNOWN_ERROR;
/** 这里调用getMediaPlayerService**/
const sp<IMediaPlayerService>& service(getMediaPlayerService());
if (service != 0) {
sp<IMediaPlayer> player(service->create(this, mAudioSessionId));
if ((NO_ERROR != doSetRetransmitEndpoint(player)) ||
(NO_ERROR != player->setDataSource(fd, offset, length))) {
player.clear();
}
err = attachNewPlayer(player);
}
return err;
} MediaPlayer mMediaPlayer = new MediaPlayer( );
mMediaPlayer.setDataSource(mContext, mUri);-
mMediaPlayer.setDisplay(mSurfaceHolder);
mMediaPlayer.setAudioStreamType(AudioManager.STREAM_MUSIC);
mMediaPlayer.prepareAsync();
mMediaPlayer.start();
/** \frameworks\av\media\libmedia\IMediaDeathNotifier.cpp*/
const sp<IMediaPlayerService>& IMediaDeathNotifier::getMediaPlayerService()
{
Mutex::Autolock _l(sServiceLock);
if (sMediaPlayerService == 0) {
/** 获取SM实例**/
sp<IServiceManager> sm = defaultServiceManager();
sp<IBinder> binder;
do {
/** 通过SM获取相应注册的服务即MediaPlayerService*/
binder = sm->getService(String16("media.player"));
if (binder != 0) {
break;
}
usleep(500000); // 0.5 s
} while (true);
if (sDeathNotifier == NULL) {
sDeathNotifier = new DeathNotifier();
}
binder->linkToDeath(sDeathNotifier);
/*** 注意在这里强制转化成IMediaPlayerService**/
sMediaPlayerService = interface_cast<IMediaPlayerService>(binder);
}
return sMediaPlayerService;
}
至此,MediaService使用Binder进行通信的机制分析完毕。总结一下总的流程,下面的流程所有Service都是相仿:
1、上面所有的分析都是基于main主函数来进行分析的:
int main(int argc __unused, char** argv)
{
// 获取一个ProcessState实例
sp<ProcessState> proc(ProcessState::self());
// 一个ServiceManager实例
sp<IServiceManager> sm = defaultServiceManager();
// 初始化MediaPlayerService服务
MediaPlayerService::instantiate();
// ProcessState开辟线程池
ProcessState::self()->startThreadPool();
// IPCThreadState加入到线程池
IPCThreadState::self()->joinThreadPool();
}
/** \frameworks\av\media\libmedia\IMediaDeathNotifier.cpp*/
class IMediaPlayerService: public IInterface
{
public:
/** 分析SM时提到的宏,该宏定义在IInterface中*/
DECLARE_META_INTERFACE(MediaPlayerService);
...
}
/* \frameworks\av\include\media\IMediaPlayerService.h*/
class BnMediaPlayerService: public BnInterface<IMediaPlayerService>
{
public:
virtual status_t onTransact( uint32_t code,
const Parcel& data,
Parcel* reply,
uint32_t flags = 0);
};
}; // namespace android/** \frameworks\av\media\libmedia\IMediaPlayerService.cpp*/
/** 注意要同SM实例一样,DECLARE之后要IMPLMENT*/
IMPLEMENT_META_INTERFACE(MediaPlayerService, "android.media.IMediaPlayerService");
status_t BnMediaPlayerService::onTransact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
/*** 这是对命令进行处理,注意下面处理的共性**/
switch (code) {
case CREATE: {
...
} break;
...
default:
return BBinder::onTransact(code, data, reply, flags);
}
}2)BpXXX:
/** /frameworks/av/media/libmedia/IMediaplayer.cpp*/
// 其实它应该和BnMediaPlayer对应,这里只用于示例
class BpMediaPlayer: public BpInterface<IMediaPlayer>
{
public:
BpMediaPlayer(const sp<IBinder>& impl) : BpInterface<IMediaPlayer>(impl)
{
}
status_t setDataSource(const char* url,
const KeyedVector<String8, String8>* headers)
{
Parcel data, reply;
data.writeInterfaceToken(IMediaPlayer::getInterfaceDescriptor());
data.writeCString(url);
if (headers == NULL) {
data.writeInt32(0);
} else {
// serialize the headers
data.writeInt32(headers->size());
for (size_t i = 0; i < headers->size(); ++i) {
data.writeString8(headers->keyAt(i));
data.writeString8(headers->valueAt(i));
}
}
remote()->transact(SET_DATA_SOURCE_URL, data, &reply);
return reply.readInt32();
}
}














 1843
1843











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









