







并发 竞态 (信号量与自旋锁)
代码传至并发竞态控制
前面所述的字符驱动都是没有考虑并发竟态的情况,想象一下
一个进程去读一个字符设备,另一个进程在同一时间向这个设备写入(完全有这种情况)
原来设备中存有 A B C D 要想设备写入1 2 3 4 每次读写一个字节
| t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 |
| R | W | W | R | W | R | R | W |
| A | 1 | 2 | 2 | 3 | 3 | D | 4 |
W:write
所以最后读出了A23D不是原来的ABCD
而如果两个进程同时写入一个设备则写入的值可能既不是A进程想要的又不是B进程想要的。
并发与竞态
并发是指 多个进程同时访问相同一段代码(不仅限于内核空间的代码)
竞态 是对共享资源访问的结果, 并发进程访问了相同的数据或结构(硬件资源)等。
解决竞态的思想 主要有两种
1、所有的代码都不使用全局变量
2、使用锁机制确保一次只有一个进程使用共享资源
显然第一种方式是不可能的,我们只能尽量少的使用全局变量,而不能完全避免它
下边介绍 两种锁机制
信号量
这个概念对我们来说应该不是很陌生,至少听说过,它有两种操作:通常叫做P操作与V操作
希望进入临界区的进程调用P操作,检测当前信号量,如果信号量大于0,则信号量减1,进入临界区,否则进程等待其他进程释放此信号量,信号量的释放通过一个V操作增加信号量的值,在某些情况下会去唤醒等待此信号量的进程。
以上说到了一个 临界区这个名词 简单来讲就是内部操作了共享数据的代码
Linux 内核中信号量的实现
因为从LLD3(2.6.10)版本出来到现在(3.1)内核函数有了很多的变化,许多书上介绍的函数都已经不存在了,也能几版新kernel之后现在我说的函数也会有变化了。
信号量结构以及相关函数的定义在<linux/semaphore.h>中
创建信号量
- void sema_init(struct semaphore *sem, int val)
val : 初始化信号量的值(代表了资源数)【val 为1时 表示代码在同一时间只允许一个进程访问 称之为互斥锁】
- void init_MUTEX();
- void init_MUTEX_LOCKED();
- struct simple_dev{
- char *data;
- loff_t count;
- struct cdev cdev;
- struct semaphore semp;
- };
- static __init int simple_init(void)
- {
- ...
- for( index = 0 ; index < DEV_COUNT ; ++index )
- {
- sema_init(&char5_dev[index].semp,1);
- //init_MUTEX(&(char5_dev[index].semp));
- init_waitqueue_head(&(char5_dev[index].queue));
- }
- ...
- }
P操作
- void down(struct semaphore *sem);
- int __must_check down_interruptible(struct semaphore *sem);
- int __must_check down_killable(struct semaphore *sem);
- int __must_check down_trylock(struct semaphore *sem);
- int __must_check down_timeout(struct semaphore *sem, long jiffies)
第二个函数 在第一个操作的基础上,如果进程因为没有得到信号量睡眠,在别的进程释放信号量或者发成中断的情况下都会被唤醒,在被中断信号唤醒时候返回-EINTR,成功返回0
第三个函数 如果没有另外的任务会获取此信号量,则可以调用此函数,在收到中断信号时会返回-EINTR
第四个函数 试图去获取信号量,在获取不到的时候不会睡眠,而是继续运行,返回0值表示得到了此信号量, 返回1 表示没能获取到。
第五个函数 可以去设置最长睡眠时间, 但是 此函数不可中断
V操作
- void up(struct semaphore *sem)
- static ssize_t simple_read(struct file *filp, char __user *userstr, size_t count, loff_t *loff)
- {
- struct simple_dev *dev = NULL;
- int data_remain = 0;
- int err;
- D("[%s:] In %s \n",current->comm, __func__);
- dev = filp->private_data;
- err = down_interruptible(&dev->semp);
- if(err)
- {
- if(err == -EINTR)
- WAR("return by an interrupt signal\n");
- else
- printk(KERN_ERR "an error occured in down_interruptible\n");
- return err;
- }
- else
- {
- D("have get the mutex %d\n", __LINE__);
- }
- /*******************************************
- * 临界区代码
- ********************************************/
- up(&dev->semp);
- return count;
- }
自旋锁
自旋锁是另一种锁机制,信号量会引起进程的休眠,而在不能睡眠的代码中我们就需要使用自旋锁。
自旋锁也是一个互斥的概念,有“锁定”与“解锁”两个操作,当程序需要锁定时候,则先检测锁是否可用,如果可用则获得锁,程序进入临界区,否则进入忙等待重复检测这个锁是否可用(这就是自旋),临界区代码操作完成则解锁。
信号量实现中其实也用到了自旋锁机制(有兴趣的刻一看内核源码,这边不展开,等以后写内核时候再介绍)
因为自旋锁在得不到锁的时候会“自旋” 即不会让出CPU ,所以我们的临界区执行速度应该尽量的快,最好使用原子操作(不会睡眠)。这也是使用自旋锁的核心规则,在多数情况下我们做不到这一点,所以自旋锁在驱动程序中使用的不如信号量频繁。
初始化
- spin_lock_init(_lock)
锁定
- static inline void spin_lock(spinlock_t *lock)
- static inline int spin_trylock(spinlock_t *lock)
- static inline void spin_lock_irq(spinlock_t *lock)
- spin_lock_irqsave(lock, flags)
- static inline void spin_lock_bh(spinlock_t *lock)
第二个函数 会尝试加锁,检测返回之判断是否锁定,在不能锁定时候程序也继续运行
第三个函数 禁止中断,不保存保存原先的中断状态
第四个函数 在禁止中断之前,保存原先的中断状态,
第五个函数 表示只禁止软件中断而保持硬件中断的打开
因为自旋锁本质上要不会被中断,所以调用时候建议使用包含有禁止中断的函数
解锁
- static inline void spin_unlock(spinlock_t *lock)
- //static inline void spin_unlock(spinlock_t *lock)
- static inline void spin_unlock_irq(spinlock_t *lock)
- static inline void spin_unlock_irqrestore(spinlock_t *lock, unsigned long flags)
- static inline void spin_unlock_bh(spinlock_t *lock)
死锁
上边只提到了使用锁的好处,以及如何使用锁,但是引入锁机制也会带来风险,那就是死锁,进程死锁最明显的表现就是死机。
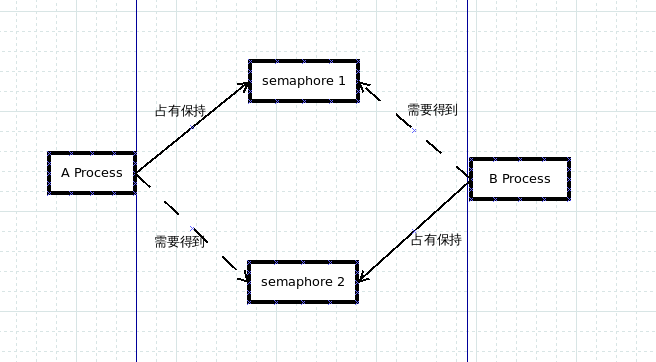
如上图所示,A进程占有锁1,并在持有锁1的时候需要得到锁2程序才能继续进行
B进程占有锁2, 并在保持锁2的同时去获取锁1程序才能继续运行,这样A, B 进程就卡在这里,互不相让,这就导致了死锁。
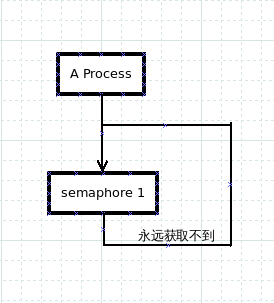
亦或 在一个进程内同时试图获取同样的锁
死锁的名词解释
是指两个或两个以上的进程在执行过程中,因争夺资源而造成的一种互相等待的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁
解决死锁的方法:
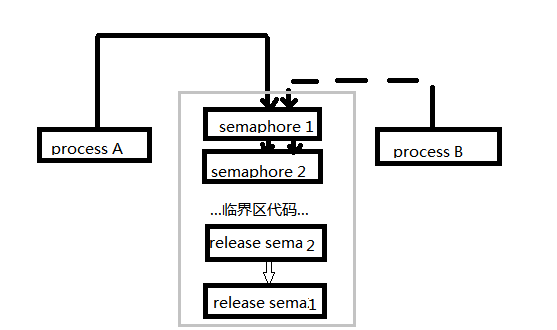
1、加解锁顺序一致
在必须使用多个锁的时候,应该始终以相同的顺序获取,也最好以获取锁顺序逆序解锁。
2、使用原子变量
原子变量不会被多个进程并发操作,内核提供了一种原子类型(atomic_t <asm/stomic.h>中)
3、设置加锁timeout值
在一定时间内不能获得锁,就放弃,并释放已占有的锁















 511
511

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









