







BING: Binarized Normed Gradients for Objectness Estimation at 300fps
Ming-Ming Cheng, Ziming Zhang, Wen-Yan Lin, Philip Torr, IEEE CVPR, 2014
基于二值化赋范梯度特征的一般对象估计
摘要:
通过训练通用的对象估计方法来产生一组候选对象窗口,能够加速传统的滑动窗口对象检测方法。我们观察到一般对象都会有定义完好的封闭轮廓,而且通过将相关图像窗口重置为固定大小,就可以通过梯度幅值进行区分。基于以上的观察以及复杂度的考虑,为了明确训练方法,我们将窗口固定为8*8的,并将梯度幅值转化为一个简单的64维的特征来描述这个窗口。
我们进一步说明这个二值化赋范特性(BING),它可以很有效的用于一般对象估计。而且只需要一些原子操作(例如加法,按位移动等),我们使用的是PASCAL VOC 2007数据集,这是很有挑战性的,实验证明,我们的方法很高效的产生一系列类别独立,高分辨率的对象窗口,通过使用1000个建议窗口,我们的对象检测准确度达到96.2%。通过增加建议窗口的数量或者考虑颜色空间来计算BING特征,实验结果可以提高到99.5%。
1.引言
作为计算机视觉的一个重要领域,对象检测已经取得了巨大的进步。然而,大部分先进的检测器,需要为每一类设计特定的分类器,并且需要评估许多图像窗口【17,25】。为了减少分类器的检测窗口,训练通用类别的对象检测方法已经变得流行起来【2,3,21,22,48,49,57】。对象状态通常表示一个图像窗口包含任意类别对象的概率值。一个通用类别的检测方法可以很方便的用于改善预处理过程:1)减少了搜索空间;2)通过使用强分类器来提高检测准确度.然而,设计一个好的通用类别的方法是非常困难的,需要:
-
具备很好的检测率,找到所有前景对象;
-
提出一些建议,用于减少对象检测的计算时间;
-
达到很高的计算效率,很容易拓展到其他实时以及大规模的应用程序中;
-
具备很好的通用性,方便用于各个类别的检测器中,这样可以减少计算量
据我们所知,暂时还没有任何方法可以同时满足以上全部要求。
认知心理学以及神经生物学研究表明,人拥有强大的能力感知对象。通过对认知反应时间和信号在生物途径中的传输速度进行深入的研究和推理,形成了人类注意力理论假定,该假定认为人类视觉系统只详细处理图像的某些局部,而对图像的其余部分几 乎视而不见,这也意味着,在识别对象之前,人类视觉系统中会有一些简单的机制来定位可能的对象。
本文中,我们提出了一个非常简单而且鲁棒性强的特征(BING),通过使用对象状态得分来协助检测对象。我们的动机来自于对象普遍是独立的,而且都具有很好定义的封闭轮廓【3,26,32】。我们观察到将图像归一化到一个相同的尺度(例如:8*8)上,一般对象的封闭轮廓和梯度范数之间具有强联系(见图1(C))。为了能够有效量化图像窗口中对象状态,我们将其重置大小为8*8,组合该窗口的像素梯度的幅值作为为一个64位的特征,通过级联的支持向量机框架学习一个通用的对象检测方法。我们进一步说明这个二值化赋范特性(BING),它可以很有效的用于一般对象估计。而且只需要一些CPU原子操作(例如加法,按位移动等)。大部分现存的先进方法,一般采用复杂的分类特征,而且需要采用加速方法以至于计算时间是可控的,相对于此,BING特征是简单朴素的。
我们已经在PASCAL VOC2007数据集上,广义的评价了我们的方法。实验结果显示,我们的方法很有效(在一个简单的桌面CPU中达到300fps)的产生了一系列数据驱动,类别独立,高分辨的对象窗口,通过使用1000个窗口(约为整个滑动窗口的0.2%),检测率达到96.2%。使用5000个建议窗口以及3个不同的颜色空间,我们的方法可以达到99.5%。借鉴【3,22,48】,我们也核实了方法的通用性。我们训练了6个已知类别,然后在14个未知类别上进行测试,得到了很好的效果(图3)。相对于其他流行的方法,BING特征能够使我们达到更好的检测率,而且速率提高了1000多倍。实现了之前我们提到的关于一个好的检测器的要求。
2.相关工作
能够在识别一个对象之前察觉它,非常接近自底向上的视觉显著性。根据显著性定义,我们广义的将相关领域的研究氛围三个类别:局部区域预测、显著性对象检测,对象状态建议。
局部区域检测: 该模型旨在预测人眼移动的显著点【4,37】。启发于神经生物学研究早期的视觉系统,Itti等人【36】提出了第一个用于显著性检测的计算模型,此模型利用了多尺度图像特征的中心-周围的差异。Ma和Zhang【42】 提出了另一种局部对比度分析方法来产生显著性图像,并用模糊增长模型对其进行扩展。Harel等人【29】提出了归一化中心分布特征来突出显著部分。 尽管几句局部区域检测模型以及取得了卓越的发展,但其倾向于在边缘部分产生高显著性值,而不是均匀地突出整个对象,因此,这种方法不适合用于对象检测。
显著性对象检测: 该模型旨在检测当前视野中最引人注意的对象,然后分割提取整个部分【5,40】。Liu等人【41】通过在CRF框架中引入局部,区域的,全局显著性测量。Achanta等人【1】提出了频率调谐方法。Cheng等人【11,14】提出了基于全局对比度分析和迭代图分割的显著性对象检测。更多的最新研究也试着基于过滤框架【46】产生一些高分辨的显著性图,采用一些效果比较好的数据【12】,或者是使用分层结构【55】。这些显著性对象分割在简单的情景图像分析【15,58】、内容感知编辑【13,56,60】中可以达到很好的效果。而且可以作为一个便宜的工具处理大规模的网络图像或者是通过自动筛选结果构建鲁棒性好的应用程序【7,8,16,31,34,35】。然而,这些方法很少能够运用于包含多对象的复杂图像,但现实生活中,这样的图片确实最有意义的。(例如:VOC【23】)
对象状态建议: 该方法并不做决定,而是提供一定数量(例如:1000)包含所有类别对象的窗口【3,22,48】。通过产生粗糙分割集【6,21】,作为对象状态建议已经被证实为一个减少分类器搜索空间的有效方式,而且可以采用强分类器提高准确率。然后,这两种方法计算量大,平均一张图片需要2-7分钟。Alexe等人【3】提出了一个线索综合性的方法来达到更好、更有效的预测效果。Zhang等人【57】采用方向梯度特征提出了一个级联的排序SVM方法。Uijlings等人【48】提出了一个可选择性的搜索方法老获得更好的预测效果。我们提出了一个简单直观的方法,相对于其他方法,达到了更好的检测效果,而且快于其他流行的方法1000多倍。
另外,对于一个有效的滑动窗口对象检测方法,保证计算量可控是非常重要的【43,51】。Lampert等人【39】提出了一个优雅的分支定界方法用于检测。但是,这些方法只能用于加速分类器,而且是用户已经提供了一个好的边框。一些其他有效的分类器【17】和近似核方法【43,51】也已经被提出。这些方法旨在减小估计单个窗口的计算量,自然也能结合对象性建议进而减小损失。
3.方法
启发于能够在识别对象之间感知它【20,38,47,54】的人类视觉系统,我们引入了一个64维的梯度幅值特征,二值化的梯度幅值特征(BING)很有效的获取到图像窗口的对象状态。
为了找到图像中的一般对象,我们扫描一个定义好的量化窗口(依据尺度或者是纵横比)。每一个窗口通过一个线性模型w ∈ R64获得得分
sl =<w,gl> (1)
l=(i,x,y) (2)
sl代表过滤器得分,gl代表NG特征,l表示坐标,i表示尺度,(x,y)表示窗口位置。运用非最大抑制(NMS),我们为每个尺度提供一些建议窗口。相对于其他窗口(例如:100*100),一些尺度(例如:10*500)的窗口包含对象的可能性是很小的。因此我们定义对象状态得分(校准过滤器得分):
ol = vi*sl+ti (3)
其中vi,ti∈ R,针对不同尺度i的窗口,得到不同的独立学习系数。使用校准函数(3)是非常快的,通常只需要在最终的建议窗口重排之后进行。
3.1 梯度幅值(NG)和对象状态
对象一般是具有很好定义封闭轮廓和中心的【3,26,32】。重置窗口的时候,就相当于将现实中的对象缩小到一个固定大小,因为在封闭的轮廓中,图像梯度变化很小,所以它是一个很好的可区分特征,就像是图1中,轮船和人在颜色,形状,纹理,光照等方面都有很大的不同,他们在梯度空间都存在共性。为了有效地利用观察结果,我们首先将输入图像重置为不同尺度的,在不同的尺度下计算梯度。然后再隔点取8*8大小的框,作为一个对应图像的64维的NG特征。
我们采用的NG特征,是一个密集的且紧凑的objectness特性,有以下几点优势:首先,由于归一化了支持域,所以无论对象窗口如何改变位置,尺度以及纵横比,它对应的NG特征基本不会改变。也就是说,NG特征是对于位置,尺度,纵横比是不敏感的,这一点是对于任意类别对象检测是很有用的。
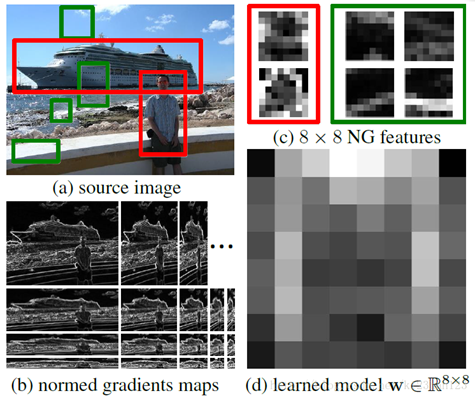
图1 尽管对象(红色)和背景(绿色),在图像空间(a)呈现出了很大的不同,通过一个适当的尺度和纵横比,我们将其分别重置为固定大小(b),他们对应的NG特征(c)表现出很大的共性,基于NG特征,我们学习了一个简单的64D线性模型(d),用来筛选对象窗口。
这种不敏感的特性是一个好的对象检测方法应该具备的。第二,NG特征的紧凑性,使得计算和核实更加有效率,而且能够很好的应用在实时应用程序中。
NG特征的缺点就是识别能力不够。但一般而言,会采用检测器来最终缺点结果的误报率。第4部分,我们将展示实验结果,在很具有挑战的VOC2007数据集上,包含了96.2%的对象窗口。
3.2 objectness度量
为了对图像窗口进行学习,我们采用了两级级联SVM。
-
我们通过式(1)学习一个线性SVM[24]。采用包含前景对象的窗口和随机选择的简单背景窗口作为训练集的正负样本;
-
用上面得到的线性SVM学习 vi,ti, 对不同的尺度 i 的训练图像我们通过式(1)进行估计,然后采用已选的窗口作为训练样例,计算过滤器得分作为一维特征,然后用训练图像注释来核实标记。
讨论:如图1,线性模型w与生物学上的灵长类动物的体系结构【27,38,54】的多尺度中心周围模式设定很类似,模型沿着边框区域具有更大的权重用来区分周围的背景。相对于手动设计中心周围模式【36】,我们的学习模型w能够获取到更加复杂也更加自然的前景。比如,低层面的对象相对于高层面的部分要更加阻塞。也就表示模型w中会给予低层次的对象更低的置信度。
3.3 二值化梯度幅值(BING)
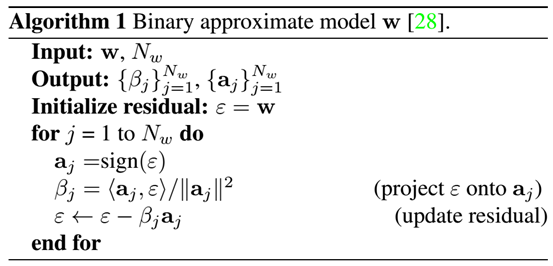
为了能够利用二值化近似模型【28,59】中的优点,我们提出了一个NG特征的加速版,二值化梯度幅值,加速特征提取和测试过程。我们学习的线性模型w∈R64可以近似表示为一系列基向量的组合
其中Nw表示基向量的个数,αj∈{-1,1}64表示基向量,βj∈R表示校准系数。αj可以进一步表示为二值向量和它的补:
 ,
, 
由α二值化之后得到的b可以被直接用于测试,而且只需要按位与和字节统计操作【28】

关键过程就是如何二值化以及有效的计算NG特征。我们近似采用梯度幅值(以及转化为01字节)的前Ng位来作二值化。

图2 变量说明:BING特征bx,y,它的最后一行是rx,y,最后一个元素bx,y。注意出现在式(2)和式(5)中的下标i, x, y, l, k,这些是定位整个向量而不是向量元素的索引。我们可以用一个简单的原子变量(INT64和BYTE)表示BING特征和它的最后一行,这样能够更有效的进行特征计算。
因此,64维 NG特征gl值可以通过前Ng位二值化梯度幅值(BING)近似表示

注意:这些BING特征拥有不同的权重,依据它原本不同的字节位。获取8*8的BING特征一般需要遍历64位,依据8*8 BING特征的两个特征,我们提出了一个快速的特征计算方法,能够只使用一些简单的原子操作(按位或和按位移动)避免循环计算。
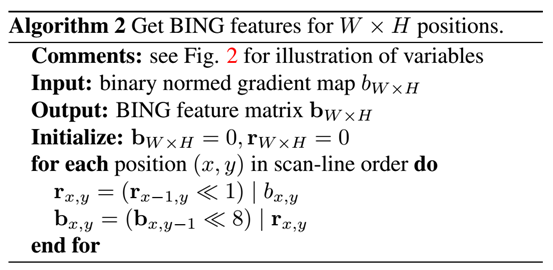
第一,BING特征bx,y以及它的最后一行rx,y可以存储在一个简单的INT64和一个BYTE变量中;第二,相邻的BING特征以及他们的行之间拥有一个简单的累积关系。如图2,将rx-1,y按位移动1位,这1位将自动进位到rx,y ,插入bx,y的过程可以用按位或来实现。同样,将bx-1,y按位移动8位,这8位将自动进位到bx,y ,自动插入rx,y。
我们的BING特征有效的利用了整体图像之间的累积性质【52】。与之前的方法在任意矩形范围内计算一些值不同的是,我们采用一些原子操作在一个固定8*8大小范围内计算一系列二进制模式。
一个图像窗口对应的BING特征bk,l的过滤器得分,见式(1),可以表示为:


其中,Cj,k可以通过一些快速的按位操作以及SSE指令操作计算得到。
实现细节:我们使用一维的标识[-1,0,1],来定义水平方向和垂直方向上的图像梯度gx和gy,当计算梯度幅值是采用min(|gx|+|gy|,255),然后将其存入一个BYTE中。
4.实验评估
我们在VOC2007数据集上实验评估了我们的方法,使用的是DR和WIN的评估标准,与3个现存最先进的方法建议质量、通用性以及效率上做了对比。正如【3,48】,一系列高检测率的粗糙集对于有效对象检测是足够了的,,而且它允许使用复杂的特征和补充线索来得到比传统方法更好的质量和更高的效率。在对比试验中,我们采用的对应作者公布的实现方式和建议的参数设置。
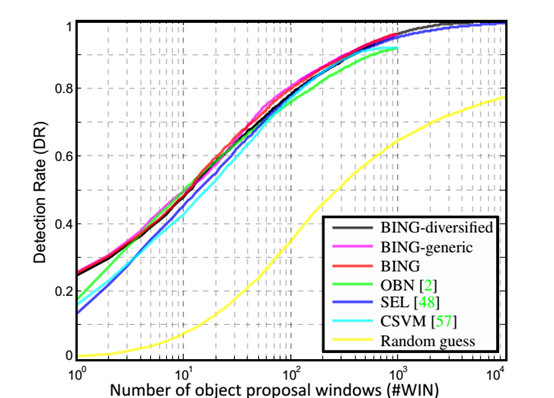
图3 不同方法关于#WIN和DR的权衡曲线。我们的方法使用1000建议窗口,达到了96.2%DR,使用5000个建议窗口可以达到99.5DR.其他三个方法我们采用了相同的评估标准,可以看出来优于一些其他的方法【6,21,25,30,50】,显著性测量【33,36】,特征点检测【44】以及HOG检测【17】.
建议质量对比:参照【3,48,57】,我们在数据集VOC2007上采用DR-WIN评估测试集,该数据集包含4952张20个类别的带有边框注释图像。数量巨大,种类繁多,视角、尺度、位置、阻塞、光照等都有不同,这些特点非常符合我们识别所有对象的要求。图3展示了数据统计对比,对比的方法有:OBN【3】,SEL【48】,以及CSVM【57】。正如【48】,通过收集不同参数设置下的结果,可以增加建议窗口的离散度,也能提高检测率DR,当然也需要提高建议窗口的数量(#WIN)。SEL【48】组合了80个不同参数设置的结果,达到了99.1%的DR和使用了10000多个建议窗口。我们的方法达到99.5%的DR,但只需要5000个建议窗口,而且仅仅收集了3个颜色空间的结果(RGB,HSV,GRAY)。如同DR-#WIN数据分析展示的那样,我们简单的方法在总体上达到了更好的效果,速率上比最流行的的方法【3,22,48】提升了3个数量级(见表格1),我们举例阐述了一些不同复杂度下的结果,如图4.
通用性测试:参照【3】,为了证明我们的方法具有通用性,采用包含未训练类别的对象图像进行测试。我们采用6个类别的对象训练我们的方法,通过剩下的14个类别进行测试。图3中,训练和测试是通过BING和BING-generic表示的。正如我们看到了那样,两个曲线基本一致,证明了我们方法的通用性。
最近的工作【18】能够在20秒内检测100000对象类别,主要采用的是减低传统多类别计算复杂度从O(LC)到O(L),L表示推荐窗口的数量,C表示分类器的数量。我们的方法可以得到任意类别(训练过的以及未训练的)的高质量的推荐窗口,可以通过减小L来显著减少计算复杂度。
计算时间:见表1,我们的方法可以在300fps的视频中,提供高效率的提供高质量的对象窗口,其他的方法对一张图片都需要几秒。这些方法通常是作为现存最先进的算法,而且很难大幅度的提升速度。我们在2501张图片上的训练需要很少的时间(包括加载XML文件,总共20S),而现有的先进的方法【6,21】测试一张图片通常需要多于2分钟.
如表2,通过采用二进制近似的方法学习线性过滤器和BING特征提取,计算每个图像窗口的得分只需要一些原子操作。
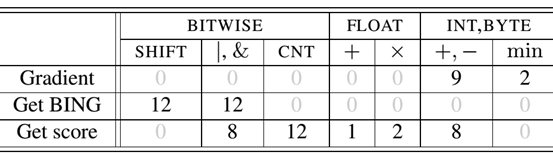
Table 2:在不同阶段,计算objectness所需要进行的原子操作数目:
计算梯度幅值,提取BING特征,获得objectness得分
在每个标准化的尺度和纵横比下,定位的数量相当于O(N),N代表图像中的像素数.因此,在所有尺寸和纵横比的图像中,计算得分的复杂度也是O(N)。在每一个潜在的位置上,提取BING特征和计算得分可以利用它邻近的2个位置(例如:左和上)。这意味着空间复杂度也是O(N)。我们在同一个Intel i7-3940XM CPU上,对比其他基准方法【3,2,,48,57】的运行时间。
如表3,我们可以进一步意识到,不同的近似对结果质量的影响,通过对比我们在其他试验中采用Nw=2,Ng=4.

Table 3:在不同近似层下的,平均检测结果(DR,使用1000个建议窗口),控制(Nw和Ng),N/A表示没有近似
5.结论以及将来的工作
我们呈现了一个非常简单,快速而且高质量的objectness方法,通过采用BING特征,计算任意尺度和纵横比的图像窗口中,我们仅仅需要一些原子操作(加,按位等)。通过最广泛的基准(VOC2007)和DR-#WIN评估标准进行结果评价,结果表明,与其他现存先进方法【3,22,48】相比,我们的方法不仅表现突出,而且速度上提升了3个数量级。
局限性: 与其他objectness方法【3,57】和滑动窗口【17,25】一样,我们都预测了一系列的对象矩形边框,因此,也有相似的局限性,对于一些类别的对象,一个矩形框并不能很好的集中实体,以便用来进行区域分割【6,21,33,45】,例如蛇。
进一步的工作:由于我们的方法具备高质量以及高效率的特性,所以它很适合实时多类别的对象检测和大规模图像收集应用程序(如:ImageNet【19】)。由于使用的简单的二进制操作,而且空间效率高,使得我们的方法可以在普通的设备上运行【28,59】。
我们的加速策略主要是减少窗口数量,这个可以通过其他的加速技术(通常旨在减少分类时间)来实现。将我们的方法和【18】的方法的进行组合将是很有趣的这样能够在一个机器上实时检测数以千计类别的对象。我们的方法解决了基于对象检测方法【53】的效率屏障,使得能够进行实时的高质量的对象检测。
通过使用简单的BING特征,我们能够使用一小部分(1000)的建议窗口得到涵盖几乎(96.2%)所有的对象区域。引入新的线索进一步降低建议窗口的数量,以便维持高效率的对象检测,以及在更多的应用程序【9】上使用BING特征,将是很值得研究的。














 434
434











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









