







 本文深入探讨3D技术中的DIBR(Depth Image Based Rendering)技术,该技术利用深度信息进行三维空间图像变换,实现视点合成。通过理解相机坐标系、图像坐标系、像素坐标系和世界坐标系之间的转换,阐述了DIBR如何基于深度图生成不同视点的图像。尽管1D映射可简单处理图像变换,但3D映射能合成任意位置的视点,面临图像质量问题,尤其是空洞填充的挑战。
本文深入探讨3D技术中的DIBR(Depth Image Based Rendering)技术,该技术利用深度信息进行三维空间图像变换,实现视点合成。通过理解相机坐标系、图像坐标系、像素坐标系和世界坐标系之间的转换,阐述了DIBR如何基于深度图生成不同视点的图像。尽管1D映射可简单处理图像变换,但3D映射能合成任意位置的视点,面临图像质量问题,尤其是空洞填充的挑战。
随着3D电影的火爆,3D正在逐渐为渗透到人们的生活中。3D技术主要解决的是对现实世界三维空间的构建,让人能够在虚拟中有现实之感。DIBR技术即(depth image based rendering),基于深度图的图像绘制,解决的主要技术是根据当前视点的彩色数据和深度数据,得到周围任意点的视点数据。电影院的3D电影可以认为是两路数据的叠加,而裸眼3D技术需要的数据量远远超过两路,这对数据的传输产生了极大的挑战。DIBR技术旨在显示终端合成各个视点的数据,为裸眼3D提供必要的技术支撑。
DIBR技术可以看作是一种三维的空间图像变换,在计算机图形学中被称为3D Image Warping技术。核心是深度信息的利用,通过深度信息构建当前视点的三维信息,进而通过映射变换,得到其他视点的三维信息。技术理解的过程中,首先我们必须要了解图像和摄像机的模型。人眼可以看作是双目相机模型,进而我们通过人眼的基本参数,如果期望DIBR视觉效果良好,在合成过程中又必须要深入人眼的结构机理。
首先来看3D变换中涉及到的四个坐标系:
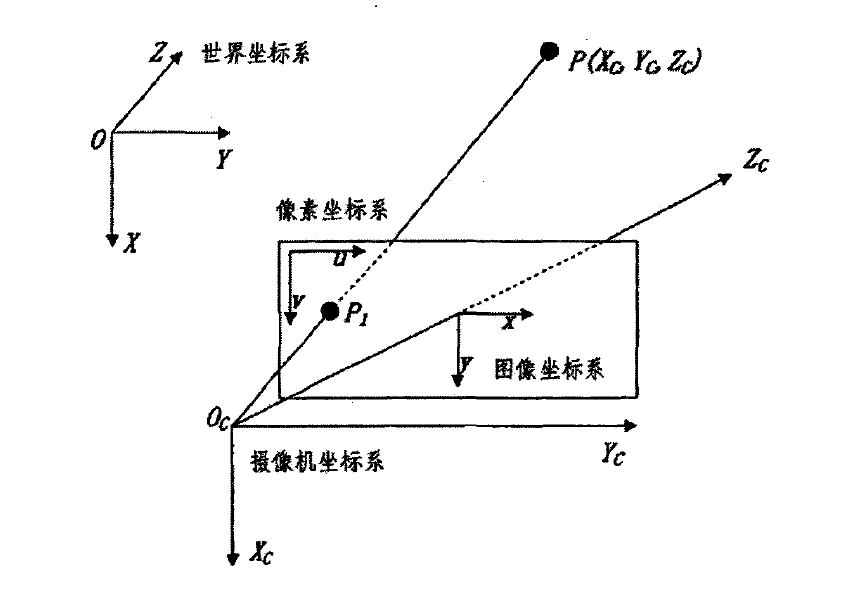
以上四个坐标系相互之间联系紧密,涉及到从物理世界到实际的图像世界的运算,而DIBR技术中深度信息的加入又增加了对现实世界的进一步理解。逐一分析四个坐标系下彩色图像和深度图像之间的转换。
首先是图像坐标系和像素坐标系。这两者之间的关系很直观的就可以看到,图像坐标系相当于像素坐标系进行了平移。一般在用matlab或者opencv进行图像操作的时候,我们使用的都是像素坐标系,即对图像的某一行或者某一列进行操作。像素坐标系不具有实际的物理意义,仅仅限于图像的操作,而在某些实际操作或者图像特征提取中,需要进行归一化或者解释实际一个像素单位代表的物理距离或者特征信息就需要将像素坐标系转换为图像坐标系。如下图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2182
2182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









