







转载自http://blog.csdn.net/uiop78uiop78/article/details/8954508
介绍了Surface, SurfaceTexture, BufferQueue, VSYNC generation, Render等内容。
后面的几篇博文中我将按照如下的顺序贴出各小节内容。
文章都是通过阅读源码分析出来的,还在不断完善与改进中,其中难免有些地方理解得不对,欢迎大家批评指正
第1章 GUI系统之SurfaceFlinger
在进入GUI系统的学习前,建议大家可以先阅读本书应用篇中的“OpenGLES”章节,并参阅OpenGL ES官方指南。因为Android的GUI系统是基于OpenGL/EGL来实现的,如果没有一定基础的话,分析源码时有可能会“事倍功半”。
1.1 OpenGLES与EGL
SurfaceFlinger虽然是GUI的核心,但相对于OpenGL ES来讲,它其实只是一个“应用”。
对于没有做过OpenGLES开发的人来讲,理解这部分的内容还是有一定难度的,特别是容易对系统中既有EGL/OpenGLES,又有SurfaceFlinger、GraphicPlane、DisplayHardware、Gralloc、FramebufferNativeWindow等一系列陌生的模块感到混乱而无序。
的确如此,假如不先理清这些模块的相互关系,对于我们深入研究整个Android显示系统就是一个很大的障碍。有鉴于此,我们先来从框架的高度审视一下它们之间看似错综复杂、剪不断理还乱的依赖。
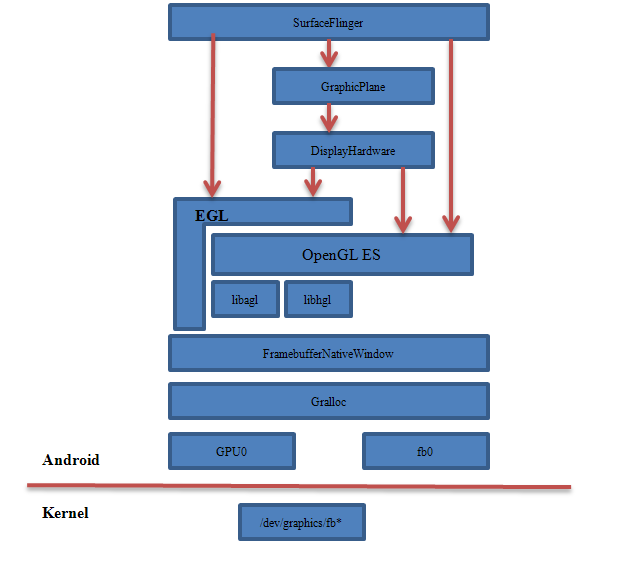
图 11‑1 SurfaceFlinger与OpenGLES等模块关系
我们根据上面这个图,由底层往上层来逐步分析整个架构:
1. Linux内核提供了统一的framebuffer显示驱动,设备节点/dev/graphics/fb*或者/dev/fb*,以fb0表示第一个Monitor,当前实现中只用到了一个显示屏
2. Android的HAL层提供了Gralloc,分为fb和gralloc两个设备。前者负责打开内核中的framebuffer、初始化配置,以及提供post、setSwapInterval等操作,后者则管理帧缓冲区的分配和释放。上层只能通过Gralloc访问帧缓冲区,这样一来就实现了有序的封装保护
3. 由于OpenGL ES是一个通用的函数库,在不同的平台系统上需要被“本地化”——即把它与具体平台上的窗口系统建立起关联,这样才能保证它正常工作。从FramebufferNativeWindow这个名称就能判断出来,它就是将OpenGL ES在Android平台上本地化的中介之一。后面我们还会看到应用程序端所使用的另一个“本地窗口”。为OpengGL ES配置本地窗口的是EGL
4. OpenGL或者OpenGL ES 更多的只是一个接口协议,实现上既可以采用软件,也能依托于硬件。这一方面给产品开发带来了灵活性,我们可以根据成本与市场定位来决定具体的硬件设计,从而达到很好的定制需求;另一方面,既然有多种实现的可能,那么OpenGL ES在运行时是如何取舍的呢?这也是EGL的作用之一。它会去读取egl.cfg这个配置文件,然后根据用户的设定来动态加载libagl(软件实现)或者libhgl(硬件实现)。然后上层才可以正常使用各种glXXX接口
5. SurfaceFlinger中持有一个GraphicPlane成员变量mGraphicPlanes来描述“显示屏”;GraphicPlane类中又包含了一个DisplayHardware对象实例(mHw)。具体是在SurfaceFlinger::readyToRun中,完成对它们的创建与初始化。并且DisplayHardware在初始化时还将调用eglInitialize、eglCreateWindowSurface等接口,利用EGL来完成对OpenGLES环境的搭建。其中:
surface =eglCreateWindowSurface(display, config, mNativeWindow.get(), NULL);
mNativeWindow 就是一个FramebufferNativeWindow对象。DisplayHardware为OpenGL ES设置了“本地化”所需的窗口
6. 很多模块都可以调用OpenGLES提供的API(这些接口以“gl”为前缀,比如glViewport、glClear、glMatrixMode、glLoadIdentity等等),包括SurfaceFlinger、DisplayHardware等
7. 与OpenGL ES相关的模块,可以分为如下几类:
Ø 配置类
即帮助OpenGL ES完成配置的,包括EGL、DisplayHardware都可以认为是这一类
Ø 依赖类
也就是OpenGL ES要正常运行起来所依赖的“本地化”的东西,上图中是指FramebufferNativeWindow
Ø 使用类
使用者也可能是配置者,比如DisplayHardware既扮演了“帮助”OpenGL的角色,同时它也是其使用方。另外只要处在与OpenGL ES同一个环境(Context)中的模块,都可以使用它来完成操作,比如SurfaceFlinger
如果是对EGL的作用、工作方式以及它所提供的重要接口等有不明白的,强烈建议大家先阅读官方文档以及本书应用篇中的章节,否则会大大影响后面的学习和理解。
1.1 Gralloc与Framebuffer
相信做过Linux开发的人对framebuffer不会太陌生,它是内核系统提供的一个与硬件无关的显示抽象层。之所以称之为buffer,是由于它也是系统存储空间的一部分,是一块包含屏幕显示信息的缓冲区。由此可见,在“一切都是文件”的Linux系统中,Framebuffer被看成了终端monitor的“化身”。它借助于文件系统向上层提供统一而方便的操作接口,从而让用户空间程序可以不用修改就能适应多种屏幕——无论这些屏幕是哪家厂商、什么型号,都由framebuffer内部来兼容。
在Android系统中,framebuffer提供的设备文件节点是/dev/graphics/fb*。因为理论上支持多个屏幕显示,所以fb按数字序号进行排列,即fb0、fb1等等。其中第一个fb0是主显示屏幕,必须存在。如下是某设备的fb设备截图:

图 11‑2 fb节点
根据前面章节学习过的知识,Android中各子系统通常不会直接基于Linux驱动来实现,而是由HAL层间接引用底层架构,在显示系统中也同样如此——它借助于HAL层来操作帧缓冲区,而完成这一中介任务的就是Gralloc,下面我们分几个方面来介绍。
<1> Gralloc的加载
Gralloc对应的模块是由FramebufferNativeWindow(OpenGLES的本地窗口之一,后面小节有详细介绍)在构造时加载的,即:
hw_get_module(HWC_HARDWARE_MODULE_ID, &mModule);
这个hw_get_module函数我们在前面已经见过很多次了,它是上层加载HAL库的入口,这里传入的模块ID名为:
#define GRALLOC_HARDWARE_MODULE_ID "gralloc"
按照hw_get_module的作法,它会在如下路径中查找与ID值匹配的库:
#define HAL_LIBRARY_PATH1 "/system/lib/hw"
#define HAL_LIBRARY_PATH2 "/vendor/lib/hw"
lib库名有如下几种形式:
gralloc.[ro.hardware].so
gralloc.[ro.product.board].so
gralloc.[ro.board.platform].so
gralloc.[ro.arch].so
或者当上述的系统属性组成的文件名都不存在时,就使用默认的:
gralloc.default.so
最后这个库是Android原生态的实现,位置在hardware/libhardware/modules/gralloc/中,它由gralloc.cpp、framebuffer.cpp和mapper.cpp三个主要源文件编译生成。
<2> Gralloc提供的接口
Gralloc对应的库被加载后,我们来看下它都提供了哪些接口方法。
由于Gralloc代表的是一个hw_module_t,这是HAL中统一定义的硬件模块描述体,所以和其它module所能提供的接口是完全一致的:
/*hardware/libhardware/include/hardware/Hardware.h*/
typedef struct hw_module_t {…
structhw_module_methods_t* methods;
…
} hw_module_t;
typedef struct hw_module_methods_t {
int (*open)(const structhw_module_t* module, const char* id,
structhw_device_t** device);
} hw_module_methods_t;
这个open接口可以帮助上层打开两个设备,分别是:
#defineGRALLOC_HARDWARE_FB0 "fb0"
以及 #define GRALLOC_HARDWARE_GPU0 "gpu0"
“fb0”就是我们前面说的主屏幕,gpu0负责图形缓冲区的分配和释放。这两个设备将由FramebufferNativeWindow中的fbDev和grDev成员变量来管理。
/*frameworks/native/libs/ui/FramebufferNativeWindow.cpp*/
FramebufferNativeWindow::FramebufferNativeWindow()
: BASE(),fbDev(0), grDev(0), mUpdateOnDemand(false)
{…
err = framebuffer_open(module, &fbDev);
err =gralloc_open(module, &grDev);
这两个open函数分别是由hardware/libhardware/include/hardware目录下的Fb.h和Gralloc.h头文件提供的打开fb及gralloc设备的便捷实现。其中fb对应的设备名为GRALLOC_HARDWARE_FB0,gralloc则是GRALLOC_HARDWARE_GPU0。各硬件生产商可以根据自己的平台配置来实现fb和gralloc的打开、关闭以及管理,比如hardware/msm7k/libgralloc就是一个很好的参考例子。
原生态的实现在hardware/libhardware/modules/gralloc中,对应的是gralloc_device_open@Gralloc.cpp。在这个函数中,根据设备名来判断是打开fb或者gralloc。
/*hardware/libhardware/modules/gralloc/Gralloc.cpp*/
int gralloc_device_open(const hw_module_t* module, const char* name,hw_device_t** device)
{
int status = -EINVAL;
if (!strcmp(name, GRALLOC_HARDWARE_GPU0)) {//打开gralloc设备
…
} else {
status = fb_device_open(module, name, device);//否则就是fb设备
}
return status;
}
先来大概看下framebuffer设备的打开过程:
/*hardware/libhardware/modules/gralloc/Framebuffer.cpp*/
int fb_device_open(hw_module_t const* module, const char* name,hw_device_t** device)
{
int status = -EINVAL;
if (!strcmp(name,GRALLOC_HARDWARE_FB0)) {//设备名是否正确
fb_context_t *dev =(fb_context_t*)malloc(sizeof(*dev));//分配hw_device_t空间,这是一个“壳”
memset(dev, 0,sizeof(*dev));//初始化,良好的编程习惯
…
dev->device.common.close = fb_close;//这几个接口是fb设备的核心
dev->device.setSwapInterval = fb_setSwapInterval;
dev->device.post = fb_post;
…
private_module_t* m =(private_module_t*)module;
status = mapFrameBuffer(m);//内存映射,以及参数配置
if (status >= 0) {
…
*device =&dev->device.common;//“壳”和“核心”的关系
}
}
return status;
}
其中fb_context_t是framebuffer内部使用的一个类,它包含了众多信息,而最终返回的device只是其内部的device.common。这种“通用和差异”并存的编码风格在HAL层非常常见,大家要做到习以为常。
Struct类型fb_context_t里的唯一成员就是framebuffer_device_t,这是对frambuffer设备的统一描述。一个标准的fb设备通常要提供如下的函数实现:
Ø int(*post)(struct framebuffer_device_t* dev, buffer_handle_t buffer);
将buffer数据post到显示屏上。要求buffer必须与屏幕尺寸一致,并且没有被locked。这样的话buffer内容将在下一次VSYNC中被显示出来
Ø int(*setSwapInterval)(struct framebuffer_device_t* window, int interval);
设置两个缓冲区交换的时间间隔
Ø int(*setUpdateRect)(struct framebuffer_device_t* window, int left, int top,
int width, int height);
设置刷新区域,需要framebuffer驱动支持“update-on-demand”。也就是说在这个区域外的数据很可能被认为无效
我们再来解释下framebuffer_device_t中一些重要的成员变量,如下表:
表格 11‑1 framebuffer_device_t中的重要成员变量
| 变量 | 描述 |
| uint32_t flags | 标志位,指示framebuffer的属性配置 |
| uint32_t width; uint32_t height; | framebuffer的宽和高,以像素为单位 |
| int format | framebuffer的像素格式,比如:HAL_PIXEL_FORMAT_RGBA_8888 HAL_PIXEL_FORMAT_RGBX_8888 HAL_PIXEL_FORMAT_RGB_888 HAL_PIXEL_FORMAT_RGB_565等等 |
| float xdpi; float ydpi; | x和y轴的密度(pixel per inch) |
| float fps | 屏幕的每秒刷新频率,假如无法正常从设备获取的话,默认设置为60Hz |
| int minSwapInterval; int maxSwapInterval; | 该framebuffer支持的最小和最大缓冲交换时间 |
到目前为止,我们还没看到系统是如何打开具体的fb设备、以及如何对fb进行配置,这些工作都是在mapFrameBuffer()完成的。这个函数首先尝试打开(调用open,权限为O_RDWR)如下路径中的fb设备:
"/dev/graphics/fb%u"或者 "/dev/fb%u",其中%u当前的实现中只用了“0”,也就是只会打开一个fb,虽然Android从趋势上看是要支持多屏幕的。成功打开fb后,我们通过:
ioctl(fd, FBIOGET_FSCREENINFO, &finfo);
ioctl(fd, FBIOGET_VSCREENINFO, &info)
来得到显示屏的一系列参数,同时通过
ioctl(fd, FBIOPUT_VSCREENINFO, &info)来对底层fb进行配置。
这个函数的另一重要任务,就是对fb做内存映射,主要语句如下:
void* vaddr = mmap(0,fbSize, PROT_READ|PROT_WRITE, MAP_SHARED, fd, 0);
module->framebuffer->base = intptr_t(vaddr);
memset(vaddr, 0, fbSize);
所以映射地址是module->framebuffer->base,这个module对应的是前面hw_get_module(GRALLOC_HARDWARE_MODULE_ID,&module)得到的hw_module_t(被强制类型转化为private_module_t,大家可以自己看下这个struct)。
接下来再看下对gralloc设备的打开操作,它相对fb简单些,如下所示:
/*hardware/libhardware/modules/gralloc/Gralloc.cpp*/
int gralloc_device_open(const hw_module_t* module, const char* name,hw_device_t** device)
{
int status = -EINVAL;
if (!strcmp(name,GRALLOC_HARDWARE_GPU0)) {
gralloc_context_t*dev;//做法和fb类似
dev =(gralloc_context_t*)malloc(sizeof(*dev));//分配空间
/* initialize ourstate here */
memset(dev, 0,sizeof(*dev));
…
dev->device.alloc =gralloc_alloc; //从提供的接口来看,gralloc和分配/释放有关系
dev->device.free =gralloc_free;
…
}
与fb相似的部分我们就不多做介绍了。因为gralloc担负着图形缓冲区的分配与释放,所以它提供了两个最重要的实现即alloc和free。这里我们先不深入分析了,只要知道gralloc所提供的功能就可以了。
我们以下面简图来小结对Gralloc的分析。
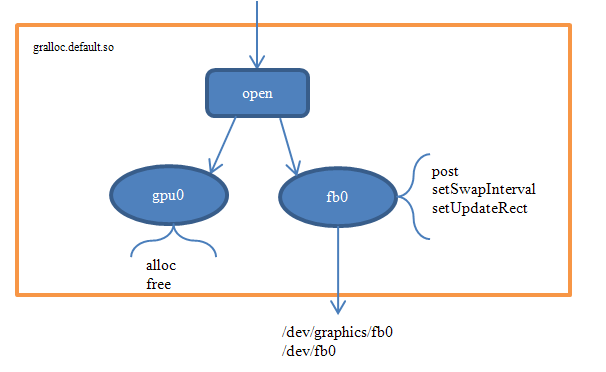
图 11‑3 Gralloc简图
1.1 Android中的本地窗口
在OpenGL的学习过程中,我们不断提及“本地窗口”(NativeWindow)这一概念。那么对于Android系统来说,它是如何将OpenGL ES本地化的呢,或者说,它提供了什么样的本地窗口?
根据整个Android系统的GUI设计理念,我们不难猜想到至少需要两种本地窗口:
Ø 面向管理者(SurfaceFlinger)
既然SurfaceFlinger扮演了系统中所有UI界面的管理者,那么它无可厚非地需要直接或间接地持有“本地窗口”。从前一小节我们已经知道,这个窗口就是FramebufferNativeWindow
Ø 面向应用程序
我们先给出答案,这类窗口是SurfaceTextureClient
有不少读者可能会觉得困惑,为什么需要两种窗口,同一个系统不是应该只有一种窗口吗?比如这样子:
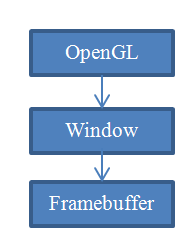
图 11‑4理想的窗口系统
这个图中,由Window来管理Framebuffer。我们打个比方来说,OpenGL就像是一台通用的打印机一样,只要输入正确的指令,它就能按照要求输出结果;而Window则是“纸”,它是用来承载OpenGL的输出结果的。OpenGL并不介意Window是A4纸或者是A6,甚至是塑料纸也没有关系,对它来说都只是“本地窗口”。
理解了这个图后,我们再来思考下,这样的模型是否能符合Android的要求?假如整个系统仅有一个需要显示UI的程序,我们有理由相信它是可以胜任的。但是如果有N个UI程序的情况呢?Framebuffer显然只有一个,不可能让各个应用程序自己单独管理。
这样子问题就来了,该如何改进呢?下面这个方法如何?
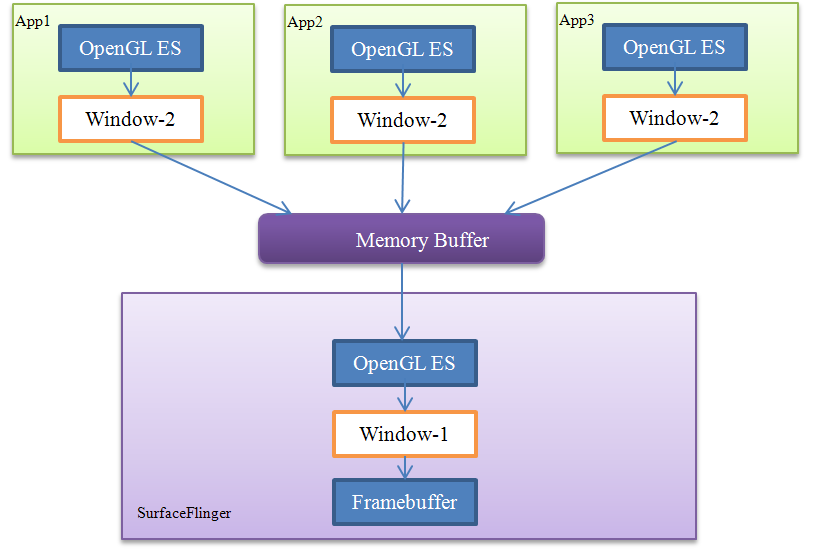
图 11‑5 改进的窗口系统
在这个改进的窗口系统中,我们有了两类本地窗口,即Window-1和Window-2。第一种窗口是能直接显示在终端屏幕上的——它使用了帧缓冲区,而后一种Window实际上是从内存缓冲区分配的空间。当系统中存在多个应用程序时,这能保证它们都可以获得一个“本地窗口”,并且这些窗口最终也能显示到屏幕上——SurfaceFlinger会收集所有程序的显示需求,对它们做统一的图像混合操作(有点类似于AudioFlinger),然后输出到自己的Window-1上。
当然,这个改进的窗口系统有一个前提,即应用程序与SurfaceFlinger都是基于OpenGL ES来实现的。有没有其它选择呢?答案是肯定的,比如应用程序端完全可以采用Skia等第三方的图形库,只要保持它们与SurfaceFlinger间的“协议”不变就可以了,如下所示:
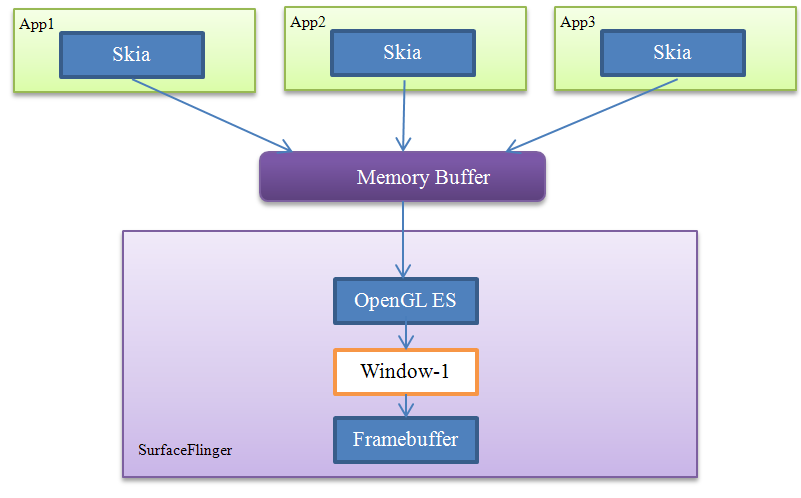
图 11‑6 另一种改进的窗口系统
理论上来说,采用哪一种方式都是可行的。不过对于开发人员,特别是没有OpenGLES项目经验的人而言,前一种系统的门槛相对较高。事实上,Android系统同时提供了这两种实现来供上层选择。正常情况下我们按照SDK向导生成的apk应用,就属于后面的情况;而对于希望使用OpenGLES来完成复杂的界面渲染的应用开发者,也可以使用GLSurfaceView来达到目标。
在接下来的源码分析中,我们将对上面所提出的假设做进一步验证。
1.1.1 FramebufferNativeWindow
先把EGL创建一个Window Surface的函数原型列出如下:
EGLSurface eglCreateWindowSurface( EGLDisplay dpy, EGLConfig config,
NativeWindowType window, const EGLint *attrib_list);
显然不论是哪一种本地窗口,它都必须要与NativeWindowType保持一致,否则就无法正常使用EGL了。先从数据类型的定义来看下这个window参数有什么特别之处:
/*frameworks/native/opengl/include/egl/Eglplatform.h*/
typedef EGLNativeWindowType NativeWindowType;//注意这两种类型其实是一样的
…
#if defined(_WIN32) || defined(__VC32__) &&!defined(__CYGWIN__) && !defined(__SCITECH_SNAP__)
/* Win32 和WinCE系统下的定义 */
…
typedef HWND EGLNativeWindowType;
#elif defined(__WINSCW__) || defined(__SYMBIAN32__) /* Symbian系统*/
…
typedef void * EGLNativeWindowType;
#elif defined(__ANDROID__) || defined(ANDROID) /* Android系统 */
struct ANativeWindow;
…
typedef struct ANativeWindow* EGLNativeWindowType;
…
#elif defined(__unix__) /* Unix系统*/
…
typedef Window EGLNativeWindowType;
#else
#error "Platform notrecognized"
#endif
我们以下表来概括在不同的操作系统平台下EGLNativeWindowType所对应的具体数据类型:
表格 11‑2 不同平台下的EGLNativeWindowType
| 操作系统 | 数据类型 |
| Win32, WinCE | HWND,即句柄 |
| Symbian | Void* |
| Android | ANativeWindow* |
| Unix | Window |
| 其它 | 暂时不支持 |
由于OpenGL ES并不是只针对某一个操作系统平台设计的,它在很多地方都要考虑兼容性和可移植性,这个EGLNativeWindowType就是其中一个例子。它在不同的系统中对应的是不一样的数据类型,比如Android中就指的是ANativeWindow指针。
ANativeWindow的定义在Window.h中:
/*system/core/include/system/Window.h*/
struct ANativeWindow
{…
const uint32_t flags; //与Surface或updater有关的属性
const int minSwapInterval;//所支持的最小交换间隔时间
const int maxSwapInterval;//所支持的最大交换间隔时间
const float xdpi; //水平方向的密度,以dpi为单位
const float ydpi;//垂直方向的密度,以dpi为单位
intptr_t oem[4];//为OEM定制驱动所保留的空间
int (*setSwapInterval)(struct ANativeWindow*window, int interval);
int (*dequeueBuffer)(struct ANativeWindow*window, struct ANativeWindowBuffer** buffer);
int (*lockBuffer)(struct ANativeWindow*window, struct ANativeWindowBuffer* buffer);
int (*queueBuffer)(struct ANativeWindow* window, struct ANativeWindowBuffer*buffer);
int (*query)(const struct ANativeWindow*window, int what, int* value);
int (*perform)(struct ANativeWindow* window,int operation, ... );
int (*cancelBuffer)(struct ANativeWindow*window, struct ANativeWindowBuffer* buffer);
void* reserved_proc[2];
};
我们在下表中详细解释这个类的成员函数。
表格 11‑3 ANativeWindow类成员函数解析
| Member Function | Description |
| setSwapInterval | 设置交换间隔时间,后面我们会讲解swap的作用 |
| dequeueBuffer | EGL通过这个接口来申请一个buffer。以前面我们所举的例子来说,两个本地窗口所提供的buffer分别来自于帧缓冲区和内存空间。单词“dequeue”的字面意思是“出队列”,这从侧面告诉我们,一个Window所包含的buffer很可能不只一份 |
| lockBuffer | 申请到的buffer并没有被锁定,这种情况下是不允许我们去修改其中的内容的。所以我们必须要先调用lockBuffer来获得一个锁 |
| queueBuffer | 当EGL对一块buffer渲染完成后,它调用这个接口来unlock和post buffer |
| query | 用于向本地窗口咨询相关信息 |
| perform | 用于执行本地窗口支持的各种操作,比如: NATIVE_WINDOW_SET_USAGE NATIVE_WINDOW_SET_CROP NATIVE_WINDOW_SET_BUFFER_COUNT NATIVE_WINDOW_SET_BUFFERS_TRANSFORM NATIVE_WINDOW_SET_BUFFERS_TIMESTAMP 等等 |
| cancelBuffer | 这个接口可以用来取消一个已经dequeued的buffer,要特别注意同步的问题 |
从上面对ANativeWindow的描述可以看出,它更像是一份“协议”,规定了一个本地窗口的形态和功能。这对于支持多种本地窗口的系统是必须的,因为只有这样子我们才能针对某种特定的平台窗口,来填充具体的实现。
这个小节中我们先来看下FramebufferNativeWindow是如何履行这份“协议”的。
FramebufferNativeWindow本身代码并不多,下面分别选取其构造函数及dequeue()两个函数来分析,其它部分的实现都是类似的,大家可以自行阅读。
(1) FramebufferNativeWindow构造函数
基于FramebufferNativeWindow的功能,可以大概推测出它的构造函数里应该至少完成如下的初始化操作:
Ø 加载GRALLOC_HARDWARE_MODULE_ID模块,详细流程我们在Gralloc小节已经解释过了
Ø 分别打开fb和gralloc设备。我们在Gralloc小节也已经分析过了,打开后的设备由全局变量fbDev和grDev管理
Ø 根据设备的属性来给FramebufferNativeWindow赋初值
Ø 根据FramebufferNativeWindow的实现来填充ANativeWindow中的“协议”
Ø 其它一些必要的初始化
下面从源码入手看下每个步骤具体是怎样实现的。
/*frameworks/native/libs/ui/FramebufferNativeWindow.cpp*/
FramebufferNativeWindow::FramebufferNativeWindow()
: BASE(), fbDev(0),grDev(0), mUpdateOnDemand(false)
{
hw_module_t const* module;
if (hw_get_module(GRALLOC_HARDWARE_MODULE_ID, &module) == 0) {…
int err;
int i;
err = framebuffer_open(module, &fbDev);
err = gralloc_open(module, &grDev);
/*上面这部分我们在前几个小节已经分析过了,不清楚的可以回头看下*/
…
mNumBuffers = NUM_FRAME_BUFFERS; //buffer个数,目前为2
mNumFreeBuffers =NUM_FRAME_BUFFERS; //可用的buffer个数,初始时所有buffer可用
mBufferHead =mNumBuffers-1;
…
for (i = 0; i <mNumBuffers; i++) //给每个buffer初始化
{
buffers[i] = new NativeBuffer(fbDev->width,fbDev->height, fbDev->format, GRALLOC_USAGE_HW_FB);
}// NativeBuffer是什么?
for (i = 0; i <mNumBuffers; i++) //给每个buffer分配空间
{
err =grDev->alloc(grDev, fbDev->width, fbDev->height, fbDev->format,
GRALLOC_USAGE_HW_FB, &buffers[i]->handle,&buffers[i]->stride);
…
}
/*为本地窗口赋属性值*/
const_cast<uint32_t&>(ANativeWindow::flags) = fbDev->flags;
const_cast<float&>(ANativeWindow::xdpi)= fbDev->xdpi;
const_cast<float&>(ANativeWindow::ydpi) = fbDev->ydpi;
const_cast<int&>(ANativeWindow::minSwapInterval) =fbDev->minSwapInterval;
const_cast<int&>(ANativeWindow::maxSwapInterval) =fbDev->maxSwapInterval;
} else {
ALOGE("Couldn'tget gralloc module");
}
/*以下履行窗口“协议”*/
ANativeWindow::setSwapInterval = setSwapInterval;
ANativeWindow::dequeueBuffer = dequeueBuffer;
ANativeWindow::lockBuffer= lockBuffer;
ANativeWindow::queueBuffer= queueBuffer;
ANativeWindow::query =query;
ANativeWindow::perform =perform;
}
这个函数逻辑上很简单,开头一部分我们已经分析过了,就不再赘述。需要注意的是FramebufferNativeWindow是如何分配buffer的,换句话说,后面的dequeue所获得的缓冲区是从何而来。
成员变量mNumBuffers代表了FramebufferNativeWindow所管理的buffer总数,NUM_FRAME_BUFFERS当前定义为2。有人可能会觉得奇怪,既然FramebufferNativeWindow对应的是真实的物理屏幕,那么为什么需要两个buffer呢?
假设我们需要绘制这样一个画面,包括两个三角形和三个圆形,最终结果如下图所示:
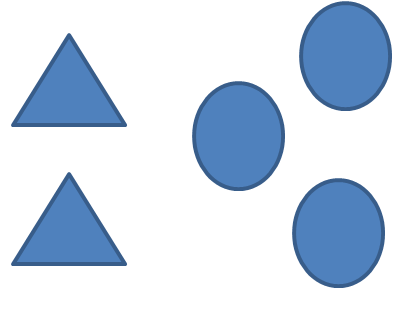
图 11‑7 希望在屏幕上显示的完整结果
先来看只有一个buffer的情况,这意味着我们是直接以屏幕为画板来实时做画的——我们画什么,屏幕上就显示什么。以绘制上图中的每一个三角形或圆形都需要0.5秒为例,那么总计耗时应该是0.5*5=2.5秒。换句话说,用户在不同时间点所看到的屏幕是这样子的:
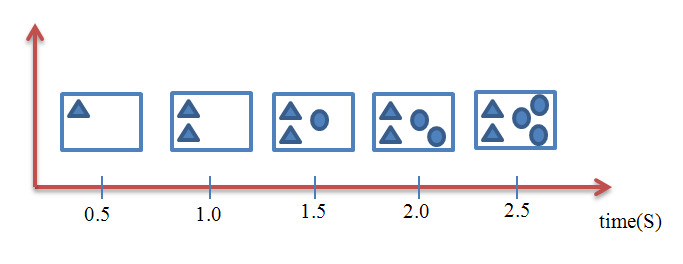
图 11‑8 只有一个buffer的情况
对于用户来说,他将看到一个不断刷新的画面。通俗来讲,就是画面很“卡”。对于图像刷新很频繁的情况,比如游戏场景,用户的体验就会更差。那么有什么解决的办法呢?我们知道,出现这种现象的原因就是程序直接以屏幕为绘图板,把还没有准备就绪的图像直接呈现给了用户。换句话说,如果可以等待整幅图绘制完成以后再刷新到屏幕上,那么对于用户来说,他在任何时候看到的都是正确而完整的图像,问题也就解决了。下图解释了当采用两个缓冲区时的情况:
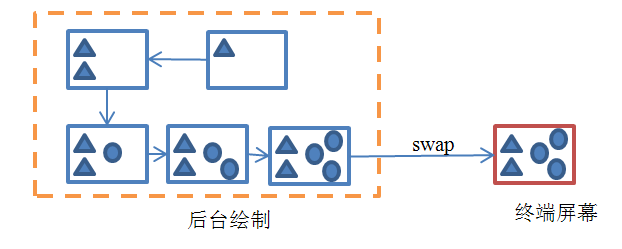
图 11‑9 采用两个缓冲区的情况
上图中所述的就是通常所称的“双缓冲”(Double-Buffering)技术。除此以外,其实还有三缓冲(TripleBuffering)、四缓冲(Quad Buffering)等等,我们将它们统称为“多缓冲”(MultipleBuffering)机制。
理解了为什么需要双缓冲以后,我们再回过头来看FramebufferNativeWindow的构造函数。接下来就要解决另一个问题,即两个缓冲区空间是从哪里分配的?根据前几个小节的知识,应该是要向HAL层的Gralloc申请。两个缓冲区以全局变量buffers[NUM_FRAME_BUFFERS]来记录,每个数据元素是一个NativeBuffer,这个类定义如下:
class NativeBuffer : public ANativeObjectBase< ANativeWindowBuffer,
NativeBuffer,LightRefBase<NativeBuffer> >
{…
所以这个“本地缓冲区”继承了ANativeWindowBuffer的特性,后者的定义在/system/core/include/system/Window.h中:
typedef struct ANativeWindowBuffer
{…
int width; //宽
int height;//高
…
buffer_handle_t handle;/*代表内存块的句柄,比如ashmem机制。
可以参考本书的共享内存章节*/
…
} ANativeWindowBuffer_t;
第一个for循环里先给各buffer创建相应的实例(new NativeBuffer),其中的属性值都来源于fbDev,比如宽、高、格式等等。紧随其后的就是调用Gralloc设备的alloc()方法:
err = grDev->alloc(grDev, fbDev->width,fbDev->height, fbDev->format,
GRALLOC_USAGE_HW_FB, &buffers[i]->handle, &buffers[i]->stride);
注意第5个参数,它代表所要申请的缓冲区的用途,定义在hardware/libhardware/include/hardware/Gralloc.h中,目前已经支持几十种,比如:
Ø GRALLOC_USAGE_HW_TEXTURE
缓冲区将用于OpenGL ES Texture
Ø GRALLOC_USAGE_HW_RENDER
缓冲区将用于OpenGL ES的渲染
Ø GRALLOC_USAGE_HW_2D
缓冲区会提供给2D 硬件图形设备
Ø GRALLOC_USAGE_HW_COMPOSER
缓冲区用于HWComposer HAL模块
Ø GRALLOC_USAGE_HW_FB
缓冲区用于framebuffer设备
Ø GRALLOC_USAGE_HW_VIDEO_ENCODER
缓冲区用于硬件视频编码器
等等。。。
这里是要用于在终端屏幕上显示的,所以申请的usage类型是GRALLOC_USAGE_HW_FB,对应的Gralloc中的实现是gralloc_alloc_framebuffer@Gralloc.cpp;假如是其它用途的申请,则对应gralloc_alloc_buffer@Gralloc.cpp。不过,如果底层只允许一个buffer(不支持page-flipping的情况),那么gralloc_alloc_framebuffer也同样可能只返回一个ashmem中申请的“内存空间”,真正的“帧缓冲区”要在post时才会被用到。
另外,当前可用(free)的buffer数量由mNumFreeBuffers管理,这个变量的初始值也是NUM_FRAME_BUFFERS,即总共有2个可用缓冲区。在程序后续的运行过程中,始终由mBufferHead来指向下一个将被申请的buffer(注意,不是下一个可用buffer)。也就是说每当用户向FramebufferNativeWindow申请一个buffer时(dequeueBuffer),这个mBufferHead就会增加1;一旦它的值超过NUM_FRAME_BUFFERS,则还会变成0,如此就实现了循环管理,后面dequeueBuffer时我们再详细解释。
一个本地窗口包含了很多属性值,比如各种标志(flags)、横纵坐标的密度值等等。这些数值都可以从fb设备上取到,我们需要将它赋予刚生成的FramebufferNativeWindow实例。
最后,就是履行ANativeWindow的协议了。FramebufferNativeWindow会将其成员函数填充到ANativeWindow中的函数指针中,比如:
ANativeWindow::setSwapInterval = setSwapInterval;
ANativeWindow::dequeueBuffer = dequeueBuffer;
这样子OpenGL ES才能通过一个ANativeWindow来正确地与本地窗口建立连接,下面我们就详细分析下其中的dequeueBuffer。
(2)dequeueBuffer
这个函数很短,只有二十几行,不过是FramebufferNativeWindow中的核心。OpenGL ES就是通过它来分配一个用于渲染的缓冲区的,与之相对应的是queueBuffer。
int FramebufferNativeWindow::dequeueBuffer(ANativeWindow* window,ANativeWindowBuffer** buffer)
{
FramebufferNativeWindow*self = getSelf(window); /*Step1*/
Mutex::Autolock_l(self->mutex); /*Step2*/
…
/*Step3. 计算mBufferHead */
int index =self->mBufferHead++;
if (self->mBufferHead>= self->mNumBuffers)
self->mBufferHead =0;
/*Step4. 当前没有可用缓冲区*/
while (!self->mNumFreeBuffers){
self->mCondition.wait(self->mutex);
}
/*Step5. 有人释放了缓冲区*/
self->mNumFreeBuffers--;
self->mCurrentBufferIndex = index;
*buffer =self->buffers[index].get();
return 0;
}
Step1@ FramebufferNativeWindow::dequeueBuffer, 这里先将入参中ANativeWindow 类型的变量window强制转化为FramebufferNativeWindow。因为前者是后者的父类,所以这样的转化当然是有效的。不过细心的读者可能会发现,为什么函数入参中还要特别传入一个ANativeWindow对象的内存地址,直接使用FramebufferNativeWindow的this指针不行吗?这个问题我还没有确定真正的原因是什么,一个猜测是为了兼容各种平台的需求。大家应该注意到了ANativeWindow是一个Struct数据类型,在C语言中Struct是没有成员函数的,所以我们通常是用函数指针的形式来模拟一个成员函数,比如这个dequeueBuffer在ANativeWindow的定义就是一个函数指针。而且我们没有办法确定最终填充到ANativeWindow中函数指针的实现是否有this指针,所以在参数中带入一个window变量就是必要的了。
Step2@ FramebufferNativeWindow::dequeueBuffer,获得一个Mutex锁。因为接下来的操作涉及到互斥区,自然需要有一个保护措施。这里采用的是Autolock,意味着dequeueBuffer函数结束后会自动释放Mutex。
Step3@ FramebufferNativeWindow::dequeueBuffer,前面我们介绍过mBufferHead变量,这里来看下对它的实际使用。首先index得到的是mBufferHead所代表的当前位置,然后mBufferHead增加1。由于我们是循环利用两个缓冲区的,所以如果这个变量的值超过mNumBuffers,那么就需要把它置0。也就是说在这个场景下mBufferHead的值永远只能是0或者1。
Step4@ FramebufferNativeWindow::dequeueBuffer,mBufferHead并不代表它所指向的缓冲区是可用的。假如当前的mNumFreeBuffers表明已经没有多余的缓冲区空间,那么我们就需要等待有人释放buffer。这里使用到了Condition这一同步机制,如果有不清楚的请参考本书进程章节的详细描述。可以肯定的是这里调用了mCondition.wait,那么必然有其它地方要唤醒它——具体的就是在queueBuffer()中,大家可以自己验证下是否如此。
Step5@ FramebufferNativeWindow::dequeueBuffer,一旦成功获得buffer后,要把可用的buffer计数减1(mNumFreeBuffers--),因为mBufferHead前面已经自增过了,这里就不用再特别处理。
这样子我们就完成了对Android系统中本地窗口FramebufferNativeWindow的分析,接下来就讲解另一个重要的Native Window。
1.1.1 SurfaceTextureClient
针对应用程序端的本地窗口是SurfaceTextureClient,和FramebufferNativeWindow一样,它必须继承ANativeWindow:
class SurfaceTextureClient
: publicANativeObjectBase<ANativeWindow, SurfaceTextureClient,RefBase>
这个本地窗口当然也需要实现ANativeWindow所制定的“协议”,我们的重点是关注它与前面的FramebufferNativeWindow有什么不同。SurfaceTextureClient的构造函数只是简单地调用了init函数,后者则对ANativeWindow::dequeueBuffer等函数指针及内部变量赋了初值。由于整个函数的功能很简单,我们只摘录其中的一部分:
/*frameworks/native/libs/gui/SurfaceTextureClient.cpp*/
void SurfaceTextureClient::init() {
/*给ANativeWindow中的函数指针赋值*/
ANativeWindow::setSwapInterval =hook_setSwapInterval;
ANativeWindow::dequeueBuffer = hook_dequeueBuffer;
…
/*为各内部变量赋值,因为此时用户还没有真正发起申请,所以基本是0*/
mReqWidth = 0;
mReqHeight = 0;
…
mDefaultWidth = 0;
mDefaultHeight = 0;
mUserWidth = 0;
mUserHeight = 0;…
}
SurfaceTextureClient是面向Android系统中所有UI应用程序的,也就是说它承担着单个应用进程中的UI显示需求。基于这点考虑,可以推测出它的内部实现至少会有以下几点:
Ø 提供给上层(主要是java层)绘制图像的“画板”
前面说过,这个本地窗口分配的内存应该不是来自于帧缓冲区,那么具体是由谁分配的,又是如何管理的呢?
Ø 它与SurfaceFlinger间是如何分工的
显然SurfaceFlinger需要收集系统中所有应用程序绘制的图像数据,然后集中显示到物理屏幕上。在这个过程中,SurfaceTextureClient扮演了什么样的角色呢?
我们先来解释下这个类中的一些重要的成员变量,如下表所示:
表格 11‑4 SurfaceTextureClient部分成员变量一览
| 成员变量 | 说明 |
| sp<ISurfaceTexture> mSurfaceTexture | 这个变量是SurfaceTextureClient的核心,很多“协议”就是通过它实现的,后面会有详细讲解 |
| BufferSlot mSlots[NUM_BUFFER_SLOTS] | 从名称上可以看出,这是Client内部用于存储buffer的地方,容量NUM_BUFFER_SLOTS最多达32个。BufferSlot类内部又由一个GraphicBuffer和一个dirtyRegion组成,当有用户dequeueBuffer时就会分配真正的空间 |
| uint32_t mReqWidth | SurfaceTextureClient中有多组相似的宽高变量,它们之间是有区别的。这里的宽和高是指下一次dequeue时将会申请的尺寸,初始值都是1 |
| uint32_t mReqHeight | |
| uint32_t mReqFormat | 和上面的两变量类似,这是指下次dequeue时将会申请的buffer的像素格式,初始值是PIXEL_FORMAT_RGBA_8888 |
| uint32_t mReqUsage | 指下次dequeue时将会指定的usage类型 |
| Rect mCrop | Crop表示“修剪”,这个变量将在下次queue时用于修剪缓冲区,可以调用setCrop来设置具体的值 |
| int mScalingMode | 同样,这个变量将用于下次queue时对缓冲区进行scale,可以调用setScalingMode来设置具体的值 |
| uint32_t mTransform | 用于下次queue时的图形翻转等操作(Transform) |
| uint32_t mDefaultWidth | 默认情况下的缓冲区宽高值 |
| uint32_t mDefaultHeight | |
| uint32_t mUserWidth | 如果不为零的话,就是应用层指定的值,将会覆盖前面的mDefaultWidth/ mDefaultHeight |
| uint32_t mUserHeight | |
| sp<GraphicBuffer> mLockedBuffer | 这三个值需要锁的保护,接下来还会有分析 |
| sp<GraphicBuffer> mPostedBuffer | |
| Region mDirtyRegion |
从这些内部变量的描述中,我们可以大概了解到两点:SurfaceTextureClient中将通过mSurfaceTexture来获得buffer,而且这些缓冲区会被记录在mSlots数组中。接下来就来分析其中的实现细节。
前面SurfaceTextureClient构造函数里我们看到ANativeWindow中的函数指针赋予的是各种以hook开头的函数,这些函数内部又直接调用了SurfaceTextureClient中真正的实现,比如hook_dequeueBuffer对应的是dequeueBuffer。这就好像是“钩子”一样,所以称之为hook。
int SurfaceTextureClient::dequeueBuffer(android_native_buffer_t**buffer) {…
Mutex::Autolocklock(mMutex);
int buf = -1;
/*Step1. 宽高计算*/
int reqW = mReqWidth ?mReqWidth : mUserWidth;
int reqH = mReqHeight ? mReqHeight :mUserHeight;
/*Step2. dequeueBuffer得到一个缓冲区*/
status_t result =mSurfaceTexture->dequeueBuffer(&buf, reqW, reqH,mReqFormat, mReqUsage);
…
sp<GraphicBuffer>& gbuf(mSlots[buf].buffer);//注意buf只是一个int值,代表的是mSlots数组序号
…
/*Step3. requestBuffer*/
if ((result &ISurfaceTexture::BUFFER_NEEDS_REALLOCATION) || gbuf == 0) {
result =mSurfaceTexture->requestBuffer(buf, &gbuf);
…
}
*buffer = gbuf.get();
return OK;
}
Step1@ SurfaceTextureClient::dequeueBuffer。用于UI绘制的图形缓冲区一定有宽高属性,具体的值由mReqWidth/mReqHeight或者mUserWidth/mUserHeight决定,其中前者的优先级比后者高
Step2@ SurfaceTextureClient::dequeueBuffer。可以看到,真正执行dequeueBuffer操作的确实是mSurfaceTexture(ISurfaceTexture)。这个变量的赋值有两个来源:作为SurfaceTextureClient的构造函数参数传入,然后间接调用setISurfaceTexture来设置的;或者SurfaceTextureClient的子类通过直接调用setISurfaceTexture来生成。
在应用进程环境中,属于后面一种情况。
具体流程就是:当Java层的Surface进行init时,实际上执行的函数是Surface_init@android_view_Surface.cpp。这个JNI函数将进一步调用SurfaceComposerClient::createSurface生成一个SurfaceControl,后者是用于管理Surface的类。它将在SurfaceControl::getSurface时生成一个Surface实例,在构造时通过SurfaceControl:: getSurfaceTexture来获得一个ISurfaceTexture。而Surface类实际上又继承自SurfaceTextureClient,所以它可以调用setISurfaceTexture。
由于Android源码有多处称为Surface的地方,取名极其混乱,我们下面通过一张完整的流程图来帮助大家把这些关系理顺:
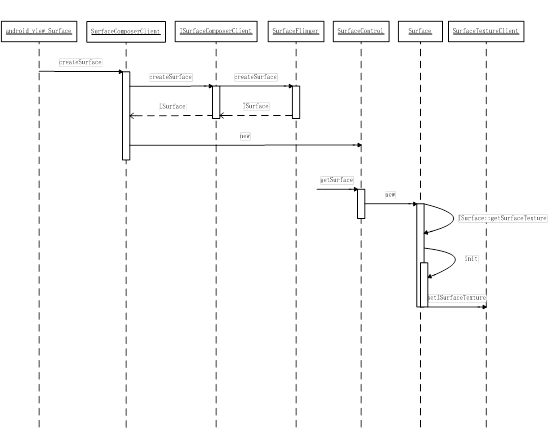
图 11‑10 ISurfaceTexture创建流程
从这个图中可以看到,ISurfaceTexture是由ISurface::getSurfaceTexture生成的,而ISurface则是由SurfaceFlinger生成的。在这一过程中,总共使用到了三个匿名binderserver,它们所提供的接口整理如下表:
表格 11‑5 与Surface相关的三个匿名binder
| 匿名Binder | 提供的接口 |
| ISurfaceComposerClient | sp<ISurface> createSurface(…); status_t destroySurface(SurfaceID sid); |
| ISurface | sp<ISurfaceTexture> getSurfaceTexture(…); |
| ISurfaceTexture | status_t requestBuffer(int slot, sp<GraphicBuffer>* buf); status_t setBufferCount(int bufferCount); status_t dequeueBuffer(…); status_t queueBuffer(…); void cancelBuffer(int slot); int query(int what, int* value); status_t setSynchronousMode(bool enabled); status_t connect(int api, QueueBufferOutput* output); status_t disconnect(int api); |
由此可见,这三个匿名binder是一环扣一环的,也就是说我们访问的顺序只能是ISurfaceComposerClientàISurfaceàISurfaceTexture。当然,第一个匿名binder就一定是需要由一个实名binder来提供,它就是SurfaceFlinger,而SurfaceFlinger则是在ServiceManager中“注册在案”的。具体是在SurfaceComposerClient::onFirstRef()这个函数中,通过向ServiceManager查询名称为“SurfaceFlinger”的binder server来获得的。不过和其它常见binder server不同的是,SurfaceFlinger虽然在ServiceManager中注册的名称为“SurfaceFlinger”,但它在server端实现的binder接口却是ISurfaceComposer,因而SurfaceComposerClient得到的其实是ISurfaceComposer,这点大家要特别注意,否则可能会搞乱。
//我们可以从SurfaceFlinger的继承关系中看出这一区别,如下代码片断
class SurfaceFlinger :
publicBinderService<SurfaceFlinger>, //在ServiceManager中注册为“SurfaceFlinger”
public BnSurfaceComposer, //实现的接口却叫ISurfaceComposer,不知道为什么要这么设计。。。
绕了一大圈后,我们接着分析前面dequeueBuffer函数的实现。很显然SurfaceTextureClient只是一个中介,它间接调用mSurfaceTexture也就是ISurfaceTexture的服务。那么ISurfaceTexture在Server端又是由谁来完成的呢?
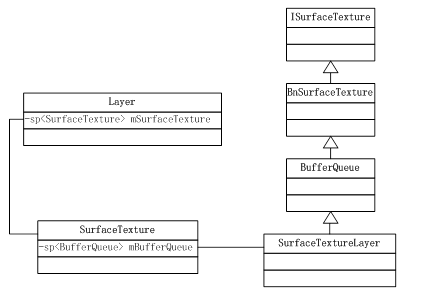
图 11‑11 ISurfaceTexture的本地端实现
因为这里面牵扯到很多新的类,我们先不做过多解释,到后面BufferQueue小节再详细分析其中的依赖关系。
当mSurfaceTexture->dequeueBuffer返回后,buf变量就是mSlots[]数组中可用的成员序号。接下来就要通过这个序号来获取真正的buffer地址,即mSlots[buf].buffer。
Step3@ SurfaceTextureClient::dequeueBuffer。假如返回值result中的标志包含了BUFFER_NEEDS_REALLOCATION,说明BufferQueue为这个Slot重新分配了空间,具体细节请参见下一个小节。此时我们还需要另外调用requestBuffer来确定gbuf的值,这其中又牵涉到很多东西,我们放在下面小节统一解释原因。
通过这两个小节,我们学习了显示系统中两个重要的本地窗口,即FramebufferNativewindow和SurfaceTextureClient。第一个窗口是专门为SurfaceFlinger服务的,它由Gralloc提供支持,相对逻辑上很好理解。而SurfaceTextureClient则是为应用程序服务的,同时它从本质上还是由SurfaceFlinger服务统一管理的,因而涉及到很多跨进程的通信细节。这个小节我们只是简单地勾勒出其中的框架,接下去就要分几个方面来做完整的分析了。
Ø BufferQueue
为应用程序服务的本地窗口SurfaceTextureClient在server端的实现是BufferQueue。我们将详细解析BufferQueue的内部实现,并结合应用程序端的使用流程来理解清楚它们之间的关系。
Ø Buffer、Consumer、Producer是“生产者-消费者”模型中的三个参与对象,如何协调好它们的工作是应用程序能否正常显示UI的关键。在接下来内容的安排上,我们先讲解Buffer(BufferQueue)与Producer(应用程序)间的交互,然后再专门切入Consumer(SurfaceFlinger)做详细分析
1.1 BufferQueue详解
上一小节我们已经看到了BufferQueue,它是SurfaceTextureClient实现本地窗口的关键。从逻辑上来推断,BufferQueue应该是驻留在SurfaceFlinger这边的进程中。我们需要进一步解决的疑惑是:
Ø 每个应用程序可以对应几个BufferQueue,它们是一对一、多对一或者是一对多?
Ø 应用程序所需要的绘图空间是由谁分配的?
在音频系统的学习中,我们知道AudioTrack和AudioFlinger是通过共享内存的形式来进行数据传递的,那么显示系统中是否也是类似情况?
Ø 应用程序与SurfaceFlinger如何互斥共享数据区
和在Audio系统中遇到的问题一样,我们面临的是经典的“生产者-消费者”模型。显示系统又是如何协调好这两者间的互斥访问的呢?
1.1.1 BufferQueue的内部原理
先来解析下BufferQueue的内部构造,如下图所示:
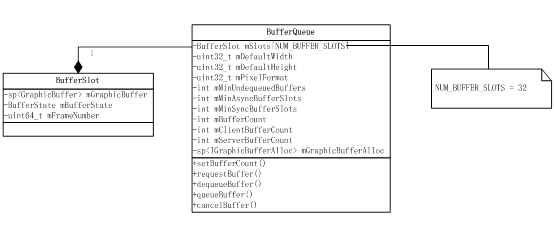
图 11‑12 BufferQueue内部变量
因为BufferQueue是ISurfaceTexture的本地实现,所以它必须重载接口中的各虚函数,比如queueBuffer、requestBuffer、dequeueBuffer等等。另外,这个类的内部有一个非常重要的成员数组,即mSlots[NUM_BUFFER_SLOTS],大家是否还记得前面SurfaceTextureClient类中也有一个一模一样的数组:
class SurfaceTextureClient…{
BufferSlot mSlots[NUM_BUFFER_SLOTS];
数组的成员是BufferSlot,其中包含的GraphicBuffer变量(mGraphicBuffer)用于记录这个Slot所涉及的缓冲区,另外还有一个BufferState变量mBufferState用于跟踪每个缓冲区的状态,比如:
enum BufferState {
FREE = 0, /*Buffer当前可用,也就是说可以被dequeued。此时Buffer的owner
可认为是BufferQueue*/
DEQUEUED = 1, /*Buffer已经被dequeued,还未被queued或canceld。此时
Buffer的owner可认为是producer(应用程序),这意味着server
端(BufferQueue)不可以对这块缓冲区进行操作*/
QUEUED = 2, /*Buffer已经被客户端queued,除特别情况外此时还不能对它进
行dequeue,而可以acquired。此时的owner是BufferQueue*/
ACQUIRED = 3/*Buffer的owner改为consumer,可以released,
然后状态又返回FREE*/
};
从上面的状态可以看出,一块Buffer大致经历的过程就是FREE->DEQUEUED->QUEUED->ACQUIRED->FREE。从owner的角度来讲,有点类似于下图的描述:
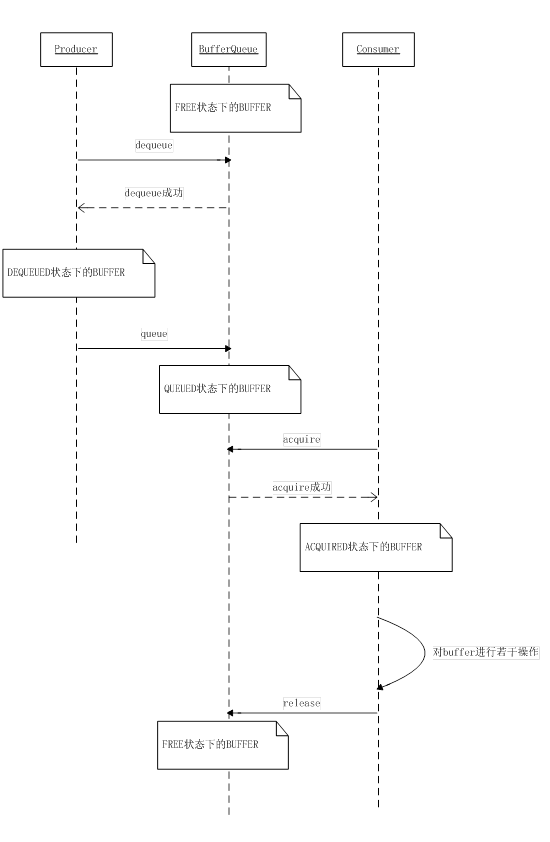
图 11‑13 Buffer的状态迁移图
我们来分析下上面的buffer状态迁移简图。
从图中可以大致看出一个buffer的各个状态、引起状态迁移的条件以及各状态下的owner。参与对buffer进行管理的对象有三个:
Ø BufferQueue
可以认为BufferQueue是一个服务中心,其它两个owner必须要通过它来管理buffer。比如说当producer想要获取一个buffer时,它不能越过BufferQueue直接与consumer进行联系,反之亦然。这有点像房产中介一样,房主与买方的任何交易都需要经过中介的同意,私自达成的协议都是违反规定的
Ø Producer
生产者就是“填充”buffer空间的人,通常情况下当然就是应用程序。因为应用程序不断地刷新UI,从而将产生的显示数据源源不断地写到buffer中。当Producer需要使用一块buffer时,它首先会向中介BufferQueue发起dequeue申请,然后才能对指定的缓冲区进行操作。这种情况下buffer就属于producer一个人的了,它可以对buffer进行任何必要的操作,而其它owner此刻绝不能擅自插手。
当生产者认为一块buffer已经写入完成后,它进一步调用BufferQueue的queue。从字面上看这个函数是“入列”的意思,形象地表达了buffer此时的操作——把buffer归还到BufferQueue的队列中。一旦queue成功后,owner也就随之改变为BufferQueue了
Ø Consumer
消费者是与生产者相对应的,它的操作同样受到BufferQueue的管控。当一块buffer已经就绪后,Consumer就可以开始工作了,具体的细节我们会在SurfaceFlinger中描述。这里需要特别留意的是,从各个对象所扮演的角色来看,BufferQueue是中介机构,属于服务提供方;Producer属于buffer内容的产出方,它对缓冲区的操作是一个“主动”的过程;反之,Consumer对buffer的处理则是“被动”的、“等待式”的——它必须要等到一块buffer填充完成后才能做工作。在这样的模型下,我们怎么保证Consumer可以及时的处理buffer呢?换句话说,当一块buffer数据ready后,应该怎么告知Consumer来操作呢?
仔细观察的话,可以看到BufferQueue里还同时提供了一个特别的类,名称为ConsumerListener,其中的函数接口包括:
struct ConsumerListener :public virtual RefBase {
virtual voidonFrameAvailable() = 0;/*当一块buffer可以被消费时,这个函数会被调用,特别注意此
时没有共享锁的保护*/
virtual voidonBuffersReleased() = 0;/*BufferQueue通知consumer它已经释放其slot中的一个或多个
GraphicBuffer引用*/
};
这样子就很清楚了,当有一帧数据准备就绪后,BufferQueue就会调用onFrameAvailable()来通知Consumer进行消费。
1.1.1 BufferQueue中的缓冲区分配
我们知道,BufferQueue中有一个mSlots数组用于管理其内的各缓冲区,最大容量为32。从它的声明方式来看,这个mSlots在程序一开始就静态分配了32个BufferSlot大小的空间。不过这并不代表缓冲区也是一次性静态分配的,恰恰相反,从BufferSlot的内部变量指针mGraphicBuffer可以看出,缓冲区的空间分配应当是动态的(从下面的注释也能看出一些端倪):
// mGraphicBuffer points to the buffer allocated for this slot or isNULL if no buffer has been allocated.
sp<GraphicBuffer> mGraphicBuffer;
现在的问题就转移为,在什么情况下会给一个Slot实际的分配空间呢?
首先能想到的就是dequeueBuffer。理由如下:
Ø 缓冲区的空间分配应该既要满足使用者的需求,又要防止浪费。后面这一点mSlots已经满足了,因为它并没有采取一开始就静态预分配的方式
Ø 既然Producer对buffer的操作是“主动”的,那么就意味着它是整个需求的发起者。换句话说,只要它没有dequeueBuffer,或者dequeueBuffer时能获取到可用的缓冲区,那当然就没有必要再重新分配空间了
来详细分析下这个函数:
/*frameworks/native/libs/gui/BufferQueue.cpp*/
status_t BufferQueue::dequeueBuffer(int *outBuf, uint32_t w,uint32_t h, uint32_t format, uint32_t usage) {…
status_t returnFlags(OK);
…
{ // Scope for the lock
Mutex::Autolocklock(mMutex); /*这里采用了自动锁,所以上面需要加个“{”,这样当lock变量生
命期结束后锁也就自动释放了。这种写法非常常见*/
…
int found = -1;
int foundSync = -1;
int dequeuedCount = 0;
bool tryAgain = true;
while (tryAgain) {/*Step1. 循环查找符合要求的slot*/
…
found = INVALID_BUFFER_SLOT;//初始值
foundSync =INVALID_BUFFER_SLOT;
dequeuedCount = 0;
for (int i = 0; i< mBufferCount; i++) {
const intstate = mSlots[i].mBufferState;
/*Step2.统计dequeued buffer数量,后面会用到*/
if (state ==BufferSlot::DEQUEUED) {
dequeuedCount++;
}
if (false) {
//肯定不会走这边
} else {
if (state== BufferSlot::FREE) { /*Step3.寻找符合要求的Slot*/
boolisOlder = mSlots[i].mFrameNumber <mSlots[found].mFrameNumber;
if(found < 0 || isOlder) {
foundSync = i;
found = i; //找到符合要求的Slot
}
}// if (state ==BufferSlot::FREE)结束
}//if(false)else结束
}// for循环结束
/*Step4.如果Client没有设置buffer count的话,就不允许dequeue一个以上的buffer*/
if(!mClientBufferCount && dequeuedCount) {
ST_LOGE("dequeueBuffer:can't dequeue multiple buffers without setting the buffer count");
return-EINVAL;
}
…
/*Step5. 判断是否要重试*/
tryAgain = found== INVALID_BUFFER_SLOT;
if (tryAgain) {
mDequeueCondition.wait(mMutex);
}
}//while循环结束
if (found ==INVALID_BUFFER_SLOT) {
/*因为前面while循环如果没找到的话是不会返回的,所以理论上不会出现这种情况*/
ST_LOGE("dequeueBuffer: no available buffer slots");
return -EBUSY;
}
const int buf = found;
*outBuf = found; //返回值
/*成功找到可用的Slot序号,接下来就开始对这个指定的Slot进行初始操作,及状态变迁等*/
…
mSlots[buf].mBufferState = BufferSlot::DEQUEUED;/*Step6.Buffer状态改变*/
constsp<GraphicBuffer>& buffer(mSlots[buf].mGraphicBuffer);
if ((buffer == NULL)|| (uint32_t(buffer->width) != w) ||(uint32_t(buffer->height) != h) ||
(uint32_t(buffer->format) != format) || ((uint32_t(buffer->usage)& usage) != usage))
{
status_t error;
/*Step7. 分配GraphicBuffer空间*/
sp<GraphicBuffer> graphicBuffer(mGraphicBufferAlloc->createGraphicBuffer(
w,h, format, usage, &error));
…
mSlots[buf].mGraphicBuffer = graphicBuffer; //这个Slot终于分配到空间了
…
returnFlags |=ISurfaceTexture::BUFFER_NEEDS_REALLOCATION;
}
…
} // 自动锁lock结束的地方
…
return returnFlags;
}
因为这个函数很长,我们尽量只留下最核心的部分。从大的方向上看,Step1-Step5是在查找一个可用的Slot序号。从Step6开始,就针对这一指定的Slot进行操作了。下面我们分步来解释。
Step1@BufferQueue::dequeueBuffer。进入while循环,退出的条件是tryAgain为false。这个变量默认值是true,如果一轮循环结束后found的值不再是INVALID_BUFFER_SLOT,就会变成false,从而结束整个while循环。
循环的主要功能就是查找符合要求的Slot,其中found变量是一个int值,指的是这个BufferSlot在mSlots数组中的序号。
Step2@BufferQueue::dequeueBuffer。统计当前已经被dequeued的buffer数量,这将用于后面的判断,即假如Client没有设置buffer count的话,那么它会被禁止dequeue一个以上的buffer。
Step3@BufferQueue::dequeueBuffer。假如当前的buffer状态是FREE,那么这个Slot就可以进入备选了。为什么只是备选而不是直接返回这一结果呢?因为当前的mSlots中很可能有多个符合条件的Slot,当然需要挑选其中最匹配的。判断的依据是当前符合要求的Slot的mFrameNumber是否比上一次选中的最优Slot的mFrameNumber小。代码如下:
bool isOlder =mSlots[i].mFrameNumber <mSlots[found].mFrameNumber;
Step4@BufferQueue::dequeueBuffer。这里的判断来源于前面第二步的计算结果,一旦发现dequeue的数量“超标”,就直接出错返回
Step5@BufferQueue::dequeueBuffer。经过上述几个步骤,我们已经扫描了一遍mSlots中的所有成员了,这时就要决定是否可以退出循环。前面已经说过,如果成功找到有效的Slot就可以不用再循环查找了,否则tryAgain仍然是true。假如是后一种情况,证明当前已经没有FREE的Slot了,这时如果直接进入下一次循环,结果通常也是一样的,反而浪费了CPU资源。所以就需要使用条件锁,代码如下:
mDequeueCondition.wait(mMutex);
当有Buffer被释放时,这个锁的条件就会满足。
Step6@BufferQueue::dequeueBuffer。根据Buffer的状态迁移图,当处于FREE状态的Buffer被dequeue成功后,它将进入DEQUEUED,所以这里我们需要改变mBufferState。
Step7@BufferQueue::dequeueBuffer。通过上述几个步骤的努力,现在我们已经成功地寻找到可用的Slot序号了,但是这并不代表这个Slot可以直接使用,为什么?最明显的一个原因就是这个Slot可能还没有分配空间。
因为BufferSlot:: mGraphicBuffer初始值是NULL,假如我们是第一次使用它,必然是需要为它分配空间的。另外,即便mGraphicBuffer不为空,但如果用户所需要的Buffer属性(比如width、height、format等等)和当前这个不符合,那么也还是要重新分配。
分配空间使用的是mGraphicBufferAlloc这个Allocator,这里暂不深究其中的实现了。
如果重新分配了空间,那么最后的返回值中需要加上BUFFER_NEEDS_REALLOCATION标志。客户端在发现这个标志后,它还应调用requestBuffer()来取得最新的buffer地址。
我们前一小节SurfaceTextureClient::dequeueBuffer()的Step3就是其中一个例子,这里统一解释一下为什么。为了方便阅读,再把这部分代码简单地列出来:
int SurfaceTextureClient::dequeueBuffer(android_native_buffer_t**buffer) {…
/*Step2. dequeueBuffer得到一个缓冲区*/
status_t result =mSurfaceTexture->dequeueBuffer(&buf, reqW, reqH,mReqFormat, mReqUsage);
…
sp<GraphicBuffer>& gbuf(mSlots[buf].buffer);//注意buf只是一个int值,代表的是mSlots数组序号
…
/*Step3. requestBuffer*/
if ((result &ISurfaceTexture::BUFFER_NEEDS_REALLOCATION) || gbuf == 0) {
result =mSurfaceTexture->requestBuffer(buf, &gbuf);
…
}
*buffer = gbuf.get();
return OK;
}
当mSurfaceTexture->dequeueBuffer成功返回后,buf得到了mSlots中可用数组成员的序号(对应这一小节的found变量)。但一个很显然的问题是,既然客户端和BufferQueue运行于两个不同的进程中,那么它们两者中的mSlots[buf]会指向同一块物理内存吗?
先来看下BpSurfaceTexture中是如何发起binder申请的:
/*frameworks/native/libs/gui/ISurfaceTexture.cpp*/
class BpSurfaceTexture : public BpInterface<ISurfaceTexture>
{ …
virtualstatus_t requestBuffer(int bufferIdx, sp<GraphicBuffer>* buf) {//函数入参有两个
Parcel data, reply;
data.writeInterfaceToken(ISurfaceTexture::getInterfaceDescriptor());
data.writeInt32(bufferIdx);//只写入了bufferIdx,也就是BnSurfaceTexture实际上是看不到buf的
status_t result=remote()->transact(REQUEST_BUFFER, data, &reply);
…
bool nonNull =reply.readInt32();//读取的是什么?我们可以去BnSurfaceTexture中去确认下
if (nonNull) {
*buf = newGraphicBuffer(); //生成一个GraphicBuffer,看到没,这是一个本地实例
reply.read(**buf);/*buf是一个sp指针,那么**sp实际上得到的就是这个智能指针所指向的
对象。在这个例子中指的是mSlots[buf].buffer*/
}
result =reply.readInt32();/*读取结果*/
return result;
}
Native层的BpXXX/BnXXX与Java层的不同之处在于,后者通常都是依赖于aidl来自动生成这两个类,而前者则是手工完成的。也正因为是手工,使用起来才也更灵活。比如在ISurfaceTexture这个例子中,开发者就耍了点技巧——SurfaceTextureClient中调用了ISurfaceTexture::requestBuffer(intslot, sp<GraphicBuffer>* buf),这个函数虽然形式上有两个参数,但只有第一个是入参,后一个则是出参。在实际的binder通信中,只有slot这个int值传递给了对方进程,而buf则自始至终都是SurfaceTextureClient进程在处理,只不过从调用者的角度来讲,好像是由ISurfaceTexture的Server端完成了对buf的赋值。
从BpSurfaceTexture::requestBuffer这个函数实现中可以看到,Client端进程向server端请求了一个REQUEST_BUFFER服务,然后通过读取返回值来获得缓冲区信息。为了让大家能看清楚这其中的细节,我们有必要先分析下BnSurfaceTexture这边具体是如何响应这个服务请求的,如下所示:
/*frameworks/native/libs/gui/ISurfaceTexture.cpp*/
status_t BnSurfaceTexture::onTransact(uint32_t code, constParcel& data, Parcel* reply, uint32_t flags)
{
switch(code) {
case REQUEST_BUFFER: {
CHECK_INTERFACE(ISurfaceTexture, data, reply);
int bufferIdx =data.readInt32();//首先读取要处理的Slot序号
sp<GraphicBuffer> buffer; //生成一个GraphicBuffer智能指针
int result =requestBuffer(bufferIdx, &buffer);//调用本地端的实现
reply->writeInt32(buffer != 0);//注意,第一个写入的值是判断buffer不为空,
//也就是一个bool值
if (buffer != 0) {
reply->write(*buffer); //好,真正的内容在这里,后面我们详细解释
}
reply->writeInt32(result);//写入结果值
return NO_ERROR;
} break;
针对BnSurfaceTexture的写入顺序,显然BpSurfaceTexture必须要按照同样的顺序来读取。
(1)因而它首先获取一个int32值,赋予nonNull变量,这个值对应的是buffer != 0逻辑判断。假如确实不为空的话,那说明我们可以接着读取GraphicBuffer了
(2)两边对GraphicBuffer变量的写和读分别是:
reply->write(*buffer);//写入
reply.read(**buf);//读取
(3)读取result结果值
在第二步中,Server端写入的GraphicBuffer对象需要在Client中完整地复现出来。根据我们在binder章节的学习,具备这种能力的binder对象应该是继承了Flattenable。实际上呢?
class GraphicBuffer: publicANativeObjectBase<ANativeWindowBuffer, GraphicBuffer,
LightRefBase<GraphicBuffer> >,public Flattenable
从GraphicBuffer声明来看,确实是证明了我们的猜测。
接下来我们只需要看下它是如何实现flatten和unflatten的,相信谜底就能揭晓了。
/*frameworks/native/libs/ui/GraphicBuffer.cpp*/
status_t GraphicBuffer::flatten(void* buffer, size_t size, intfds[], size_t count) const
{ …
int* buf =static_cast<int*>(buffer);
…
if (handle) {
buf[6] = handle->numFds;
buf[7] = handle->numInts;
native_handle_t const*const h = handle;
memcpy(fds, h->data, h->numFds*sizeof(int));
memcpy(&buf[8], h->data + h->numFds, h->numInts*sizeof(int));
}
return NO_ERROR;
}
这个函数中,我们最关心的是handle这个变量的flatten,它实际上是GraphicBuffer中打开的一个ashmem句柄,因而也就是两边进程共享缓冲区的关键。与handle相关的分别是buf[6]-buf[8]以及fds,再来看下Client端是如何还原出一个GraphicBuffer的。
status_t GraphicBuffer::unflatten(void const* buffer, size_t size,int fds[], size_t count)
{…
int const* buf =static_cast<int const*>(buffer);
…
const size_t numFds = buf[6];
const size_t numInts =buf[7];
…
if (numFds || numInts) {…
native_handle* h = native_handle_create(numFds, numInts);
memcpy(h->data, fds, numFds*sizeof(int));
memcpy(h->data +numFds, &buf[8], numInts*sizeof(int));
handle = h;
} else { …
} …
if (handle != 0) {
mBufferMapper.registerBuffer(handle);
}
return NO_ERROR;
}
同样,unflatten中的操作依据的也是flatten时写入的格式。其中最重要的两个函数是native_handle_create()和registerBuffer()。前一个函数生成native_handle实例,并将相关数据拷贝到其内部。另一个registerBuffer则属于GraphicBufferMapper类中的实现,成员变量mBufferMapper是在GraphicBuffer在构造函数中生成的,它所承担的任务是和Gralloc打交道,代码如下:
GraphicBufferMapper::GraphicBufferMapper()
{
hw_module_t const* module;
int err = hw_get_module(GRALLOC_HARDWARE_MODULE_ID, &module);
这里出现了我们熟悉的Gralloc的moduleid,不清楚的可以回头看下Gralloc这小节的介绍。GraphicBufferMapper::registerBuffer()只是一个中介作用,它会直接调用gralloc_module_t::registerBuffer(),那么后者究竟完成了什么功能?因为这个函数的实现与具体平台有关,我们以msm7k为例大概看下:
/*hardware/msm7k/libgralloc/Mapper.cpp*/
int gralloc_register_buffer(gralloc_module_t const* module,buffer_handle_t handle)
{…
private_handle_t* hnd =(private_handle_t*)handle;
…
err =gralloc_map(module, handle, &vaddr);
return err;
}
可以看到,通过handle句柄,Client端可以将指定的内存区域映射到自己的进程空间中,而这块区域与BufferQueue中所指向的物理空间是一致的,从而成功地实现了缓冲区的共享。
这样子在SurfaceTextureClient::dequeueBuffer()中,当遇到结果中包含有BUFFER_NEEDS_REALLOCATION的情况时,我们再通过requestBuffer()得到的结果来“刷新”Client这端mSlots[]所管辖的缓冲区信息,以保证SurfaceTextureClient与BufferQueue能在任何情况下都对32个BufferSlot保持数据上的高度一致。这也是后面它们能正确实施“生产者-消费者”模型的基础。
1.1.1 应用程序的典型绘图流程
我们知道,BufferQueue有最多达32个BufferSlot,这样设计的目的是什么?一个可能的原因就是提高图形渲染速度。因为假如只有两个buffer,可以想象一下,当应用程序这个生产者的产出效率大于消费者的处理速度时,很快它就会dequeue完所有缓冲区而处于等待状态,从而导致不必要的麻烦。当然,实际上32只是最大的容量,具体值是可以设置的,大家可以结合后面的ProjectButter小节来理解一下。
前面小节我们已经学习了BufferQueue的内部原理,那么应用程序又是如何与之配合的呢?
解决这个疑惑的关键就是了解应用程序是如何执行绘图流程的,这也是本节我们叙述的重点。不过大家应该有个心里准备,应用程序并不会直接使用BufferQueue。和Android系统中很多其它地方一样,“层层包裹”在这里同样是存在的,因而我们要尽量抓住其中的重点,并辅以一定的手段,才能更好更快地从诸多错综复杂的类关系中找出问题的答案。
出于以上原因的考虑,我们选取系统的开机动画这一应用程序,来分析整个图形绘制的流程。值得一提的是,这个开机动画的实现符合前面提到的两个改进的图形系统中的第一个,即应用程序与SurfaceFlinger都是使用OpenGL ES来完成UI显示,不过因为它是一个C++程序,所以不需要上层GLSurfaceView的支持。
当一个Android设备上电后,正常情况下它会先后显示最多4个不一样的开机画面,分别是:
l boot-loader
这显然是第一个出现的画面。因为boot-loader只是负责系统后续模块的加载与启动,而且要求文件体积很小,所以一般我们只让它显示一张静态的图片
l kernel
在进入内核后,同样会在物理屏幕上有所显示。和boot-loader一样,默认情况下它也只是一张静态图片
l android(2个)
Android是系统启动的最后一个阶段,也是最耗时间的一个。它的开机画面既可以是静态文字描述、静态图片,也可以是动态画面。通常第一个是文字或者静态图片(假如指定路径下的图片不存在的话,就显示文字。关于这方面的资料很多,大家可以自行查阅,我们这里不作过多叙述),另外一个则是动画,如下图所示:

图 11‑14 原生态Android系统中的开机动画
这个开机动画的实现类是BootAnimation,它的内部就是借助SurfaceFlinger来完成的。另外,因为它并不是传统意义上的Java层应用程序,这使得我们可以抛离很多上层的牵绊,以最直观的方式来审视BufferQueue的使用,是分析本节问题的最佳选择。
BootAnimation是一个C++程序,其工程源码路径是/frameworks/base/cmds/bootanimation。和很多native应用一样,它也是在init脚本中被启动的,大概来看下这一过程。
|
service bootanim /system/bin/bootanimation class main user graphics group graphics disabled oneshot |
以上内容是从init.rc脚本中摘录出来的,完整地描述了bootanimation这个程序的启动属性。如果大家对其中的内容不清楚的话,可以参见本书的系统启动章节。
当bootanimation被启动后,它首先会进入main函数,即main@Bootanimation_main.cpp,生成一个BootAnimation对象,并开启线程池(因为它需要与SurfaceFlinger等系统服务进行跨进程的通信)。在BootAnimation的构造函数中,同时生成一个SurfaceComposerClient:
BootAnimation::BootAnimation() : Thread(false)
{
mSession = newSurfaceComposerClient();
}
SurfaceComposerClient是每个UI应用程序与SurfaceFlinger间的独立纽带,后续很多操作都是通过它来完成的。不过这个类只是一个封装,真正起作用的还是其内部的ISurfaceComposerClient。更多的分析我们将放在后续小节中,这里只要先知道它的功能就可以了。值得一提的是,前面小节中我们讲到了ISurfaceTexture,这里又有一个ISurfaceComposerClient,两者有什么区别呢?
简单来说,ISurfaceTexture是应用程序与BufferQueue的传输通道,而ISurfaceComposerClient则是它与SurfaceFlinger间的桥梁。这样子的设计是合理的,体现了模块化的思想——SurfaceFlinger的职责是“Flinger”,即把系统中所有应用程序的最终的“绘图结果”进行“混合”,然后统一显示到物理屏幕上。它不应该,也没有办法分出太多的精力去一一关注各个应用程序的“绘画过程”。这个光荣的任务自然而然地落在了BufferQueue的肩膀上,它是每个应用程序“一对一”的辅导老师,指导着UI程序的“画板申请”、“作画流程”等一系列细节。下面的图描述了这三者的关系:

图 11‑15 应用程序、BufferQueue及SurfaceFlinger间的关系
所以BootAnimation在其构造函数中就建立了与SurfaceFlinger的联系通道。那么它在什么时候会再去建立与BufferQueue的连接呢?因为BootAnimation继承自RefBase,当main函数中通过sp指针引用它时,会触发如下函数:
void BootAnimation::onFirstRef() {
status_t err =mSession->linkToComposerDeath(this);//监听死亡事件
if (err == NO_ERROR) {
run("BootAnimation", PRIORITY_DISPLAY);//开启线程
}
}
当一个client与远程server端的建立了binder联系后,它就可以使用这个server的服务了,但前提是服务端正常运行——换句话说,假如出现了server异常的情况,client又如何知道呢?这就是linkToComposerDeath要解决的问题,它的第一个参数指明了接收binder server死亡事件的人,在这个例子中就是BootAnimation自身。这是因为它继承了IBinder::DeathRecipient,并实现了其中的binderDied接口。
如果上一步没有出错的话(err== NO_ERROR),接下来就要启动一个新线程来承载业务了。为什么需要独立创建一个新的线程呢?前面main函数中大家应该发现了BootAnimation启动了binder线程池,可以想象在只有一个线程的情况下,它是不可能既监听binder请求,又去做开机动画的绘制的。所以当一个新的线程被run起来后,又触发了下列函数的调用:
status_t BootAnimation::readyToRun() {…
/*第一部分,向server端获得buffer空间,从而得到EGL需要的本地窗口*/
sp<SurfaceControl>control = session()->createSurface(0, dinfo.w,dinfo.h, PIXEL_FORMAT_RGB_565);
SurfaceComposerClient::openGlobalTransaction();
control->setLayer(0x40000000);
SurfaceComposerClient::closeGlobalTransaction();
sp<Surface> s = control->getSurface();
/*以下为第二部分,即EGL的使用流程*/
const EGLint attribs[] = {…//属性值较多,节约篇幅,我们省略具体内容};
EGLint w, h, dummy;
EGLint numConfigs;//总共有多少个config
EGLConfig config;
EGLSurface surface;
EGLContext context;
EGLDisplay display =eglGetDisplay(EGL_DEFAULT_DISPLAY);//第一步,得到默认的物理屏幕
eglInitialize(display, 0,0);//第二步,初始化
eglChooseConfig(display,attribs, &config, 1, &numConfigs);//第三步,选取最佳的config
surface =eglCreateWindowSurface(display, config, s.get(),NULL);//第四步,通过本地窗口创建Surface
context =eglCreateContext(display, config, NULL, NULL);//第五步,创建context环境
…
if(eglMakeCurrent(display, surface, surface, context) == EGL_FALSE)//第六步,设置当前环境
return NO_INIT;
…
return NO_ERROR;
}
从这个函数中不但可以看出应用程序是如何使用BufferQueue的,而且还有另外一个重要的学习点,即Opengl ES与EGL的使用流程。在本书应用篇章中我们已经给出了EGL的使用实例,这里则可以做为第二个例子。
函数首先通过session()->createSurface()来获取一个SurfaceControl。其中session()得到的是mSession变量,也就是前面构造函数中生成的SurfaceComposerClient对象,所以createSurface()最终就是由SurfaceFlinger来实现的。只不过SurfaceFlinger中返回的其实是一个ISurface对象,本地端的SurfaceComposerClient又包装了一层,变成了SurfaceControl,言下之意就是对ISurface进行管理。大家肯定会有疑惑,ISurface从哪冒出来的,做什么的?要回答这点不难,只要看下SurfaceFlinger中最终是传了个什么对象过来就行:
sp<ISurface> SurfaceFlinger::createSurface(…)
{
sp<LayerBaseClient>layer;
sp<ISurface>surfaceHandle;
//中间省略layer的生成过程
surfaceHandle =layer->getSurface();
returnsurfaceHandle;…
我们省略了中间一大段过程,只保留与问题相关的部分,更详细的分析可以参见后面的SurfaceFlinger小节。从中可以清楚看到,ISurface是通过layer->getSurface()得到的。Layer类在SurfaceFlinger中表示“层”的概念,而ISurface则是客户端与这个“层”进行沟通的通道。通俗地讲“层”就代表了一个“画面”,最终的显示结果就是通过对系统中同时存在的所有“画面”进行处理得到的。打个比方来说,就好像是一排人各举着一张绘画作品,那么观察者从最前面往后看时,他首先可以看到的就是第一张画。而假如第一张画恰好比第二张小,又或者第一张是透明/半透明的(这并非不可能,比如作者是在玻璃上创作的),那么他才能看到第二张画,以此类推。。。
这个比喻告诉我们,layer是有层级的,越靠近用户的那个“层”就越有优势。
明白了这个道理,函数接下来调用setLayer就不难理解了。不过参数中传入了一个数值0x40000000,这又是什么意思?其实这个值就是layer的层级,数字越大就越靠近用户,在显示系统中我们通常称为z-order。以后在Window Manager Service章节的分析中还会看到对setLayer的调用,因为此时系统中还只有开机画面一个应用程序,所以我们还不需要担心z-order的问题。
设置完层级后,我们接着control->getSurface()来得到一个Surface对象。相关的类越来越多了,而且由于命名上的不恰当,进一步加剧了大家理解上的困难。其实可以来猜测下这个类是做什么的?根据如下:
l 第二部分中的eglCreateWindowSurface使用了Surface,证明它必然是一个本地窗口
l 前几个小节我们介绍的两种本地窗口,一个是FramebufferNativeWindow,另一个是SurfaceTextureClient,那么看来Surface必然要与其中一个有关联。很显然的,运行于应用程序端的本地窗口必然是SurfaceTextureClient,我们可以从Surface的继承关系中得到验证:
class Surface : public SurfaceTextureClient
的确是太乱了,我们有必要先来整理下目前已经出现的容易混淆的相关类的关系。
ISurfaceComposerClient: 应用程序与SurfaceFlinger间的通道,在应用进程中则被封装在SurfaceComposerClient这个类中。这是一个匿名binder server,由应用程序(具体位置在SurfaceComposerClient::onFirstRef中)调用SurfaceFlinger这个实名binder的createConnection方法来获取到,服务端的实现是SurfaceFlinger::Client。
ISurface:由应用程序调用ISurfaceComposerClient::createSurface()得到,同时在SurfaceFlinger这一进程中将会有一个Layer被创建,代表了一个“画面”。ISurface就是控制这一画面的handle。
Surface:从逻辑关系上看,它是上述ISurface的使用者。从继承关系上看,它是一个SurfaceTextureClient,也就是本地窗口。SurfaceTextureClient内部持有ISurfaceTexture,即BufferQueue的实现接口。换个角度来思考,当EGL想通过Surface这个native window完成某些功能时,后者实际上又利用ISurface和ISurfaceTexture来取得远程服务端的对应服务,以完成EGL的请求。
回到BootAnimation::readyToRun()中来。因为本地窗口Surface已经成功创建,接下来就该EGL上场了,具体流程我们在代码中都加了注释,这里就不赘述了。
当EGL准备好环境后,意味着程序可以正常使用opengl ES提供的各种API函数进行绘图了。这部分实现就集中在随后的threadLoop()以及android()/movie()中。因为不属于本小节的讨论范围,有兴趣的读者可以自行参阅学习。
最后来做下小结,一个典型的应用程序使用SurfaceFlinger进行绘图的流程如下图所示:
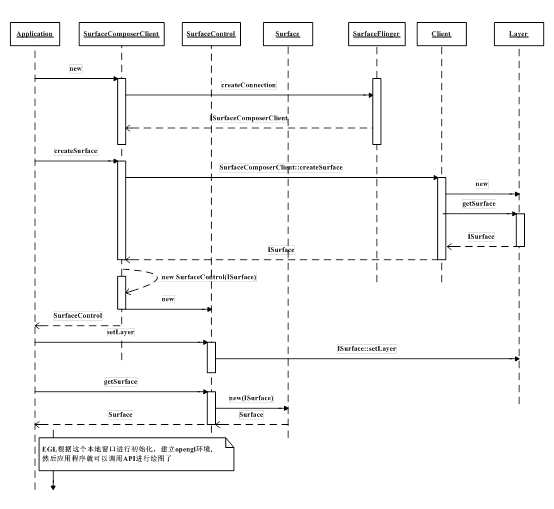
图 11‑16 应用程序通过SurfaceFlinger进行绘图的典型流程
上图是从时序纵向角度总结出来的流程,我们再从横向的角度来看下,应该就更清楚了。
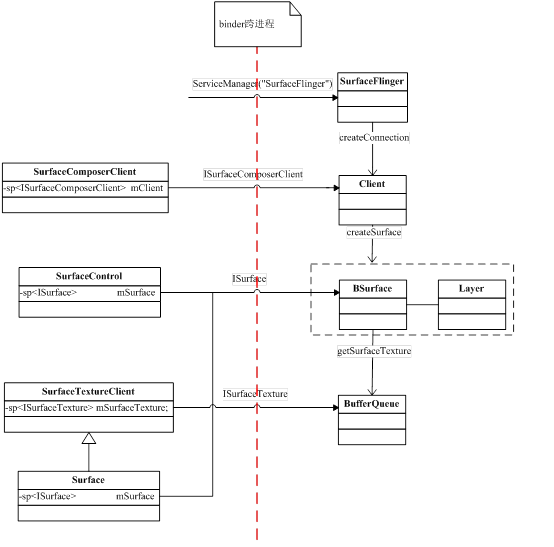
图 11‑17 横向角度考查Surface相关类的关系
可以看到,涉及到的类还是比较多的,而且多数都涉及到跨进程通信。希望大家能熟悉这两张图,在后几个小节的学习中,如果觉得混乱的时候也可以回头来看下,加深印象。
1.1.1 应用程序与BufferQueue的关系
接着上一小节未解决完的问题继续讲解。
现在我们已经明白了应用程序利用SurfaceFlinger进行绘制工作的大致流程了,只不过在这个过程中直到最后才出现了BufferQueue。应用程序具体是如何借助BufferQueue来完成工作的呢?
仔细观察不难发现,当应用端通过ISurfaceComposerClient::createSurface()来发起创建Surface的请求时,SurfaceFlinger服务进程这边会创建一个Layer。既然Layer代表了一个画面图层,那么它肯定需要有存储图层数据的地方,因而我们选择从这里做为入口。
/*frameworks/native/services/surfaceflinger/SurfaceFlinger.cpp*/
/*应用程序首先是要通过ISurfaceComposerClient来访问createSurface,这个接口实际上只是一个中介,它将应用的请求传送到SurfaceFlinger的消息队列中,而不是直接调用SurfaceFlinger来处理。这样做是有必要的,因为一个系统中需要SurfaceFlinger处理的来自各应用程序的消息是很多的,除非一些紧急情况,否则都应该排队等待*/
sp<ISurface>SurfaceFlinger::createSurface(ISurfaceComposerClient::surface_data_t* params,
constString8& name, const sp<Client>& client, DisplayID d,
uint32_tw, uint32_t h, PixelFormat format, uint32_t flags)
{
sp<LayerBaseClient>layer;
sp<ISurface>surfaceHandle;
…
sp<Layer>normalLayer;
switch (flags &eFXSurfaceMask) { //Layer类型
case eFXSurfaceNormal:
normalLayer = createNormalSurface(client, d, w, h, flags, format);
layer =normalLayer;
break;
case eFXSurfaceBlur://4.1系统中将Blur与Dim类型当成一种
case eFXSurfaceDim:
layer = createDimSurface(client, d, w, h, flags);
break;
case eFXSurfaceScreenshot:
layer = createScreenshotSurface(client, d, w, h, flags);
break;
}
if (layer != 0) {…
surfaceHandle = layer->getSurface();
…
}
return surfaceHandle;
}
可以看到,最后返回给应用程序的ISurface对应的变量是surfaceHandle,由layer通过getSurface()产生。从enum值定义来看,当前系统中有多达十几种Layer类型,只不过多数还没有真正实现,目前能用的只有四个,即eFXSurfaceNormal、eFXSurfaceBlur、eFXSurfaceDim、eFXSurfaceScreenshot。第一种就是通常情况下的图层;第二和第三种在当前系统中都被以eFXSurfaceDim来实现,从注释上看,很可能是Blur类型的Layer比较耗资源,所以暂时用Dim来取代。相信在后续的Android版本中还会把它们再区分开来。
Layer和ISurface有什么联系?
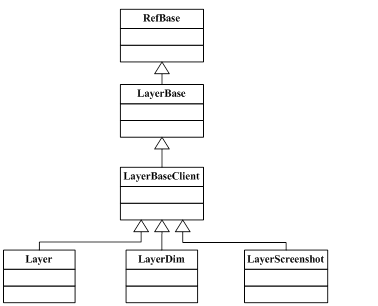
图 11‑18 Layer类继承关系
/*frameworks/native/services/surfaceflinger/LayerBase.cpp*/
sp<ISurface> LayerBaseClient::getSurface()
{
sp<ISurface> s;
Mutex::Autolock _l(mLock);
LOG_ALWAYS_FATAL_IF(mHasSurface, "LayerBaseClient::getSurface() hasalready been called");
mHasSurface = true;
s = createSurface(); //通过这个函数产生一个ISurface
mClientSurfaceBinder= s->asBinder();
return s;
}
这个函数只能被调用一次,由mHasSurface来控制。当被第二次调用时,就会发生assert错误。LayerBaseClient通过成员变量mClientSurfaceBinder来记录ISurface。一个系统中同时存在的Layer和Surface通常不会只有一个,那么ISurface是如何知道它所属的Layer的呢?
sp<ISurface> LayerBaseClient::createSurface()
{
class BSurface : publicBnSurface, public LayerCleaner {
virtualsp<ISurfaceTexture> getSurfaceTexture() const { return 0; }
public:
BSurface(constsp<SurfaceFlinger>& flinger, const sp<LayerBaseClient>&layer)
:LayerCleaner(flinger, layer) { }
};
sp<ISurface> sur(newBSurface(mFlinger, this));
return sur;
}
和一般的写法不同,ISurface的本地实现BSurface是定义在函数中的。不过这不是问题的关键,关键问题是BSurface中的getSurfaceTexture居然直接返回了一个null(0),显然如果是这样的话程序就没法继续执行了。唯一的解释是应该有LayerBaseClient的子类重载实现了这一函数,来看下Layer中是不是这样的。
/*frameworks/native/services/surfaceflinger/Layer.cpp*/
sp<ISurface> Layer::createSurface()
{
class BSurface : publicBnSurface, public LayerCleaner {
wp<const Layer>mOwner;
virtualsp<ISurfaceTexture> getSurfaceTexture() const {
sp<ISurfaceTexture> res;
sp<constLayer> that( mOwner.promote() );
if (that != NULL){
res =that->mSurfaceTexture->getBufferQueue();
}
return res;
}
public:
BSurface(constsp<SurfaceFlinger>& flinger, const sp<Layer>& layer)
: LayerCleaner(flinger,layer), mOwner(layer) { }//mOwner在构造函数中以Layer赋值
};
sp<ISurface> sur(newBSurface(mFlinger, this));
return sur;
}
看来我们猜测的是对的,Layer的确重载了createSurface。而且这里的getSurfaceTexture就不是pseudo的了。函数的最后生成了一个BSurface,注意看下它的构造参数中传入了this指针,也就是Layer对象自身。这个指针是后期ISurface与它通信的关键。同时作为入参的还有mFlinger,这样ISurface也可以访问到SurfaceFlinger了。因为这几个类都运行于同一个进程空间中,可以看到它们都直接是内存地址的传递,不需要IPC通信。
当应用程序通过ISurfaceComposerClient::createSurface()得到一个ISurface后,它会接着使用ISurface::getSurfaceTexture()来取得可用的texture(具体是由Surface在构造时获取,然后再通过Surface::init->setISurfaceTexture来将ISurfaceTexture赋值给SurfaceTextureClient::mSurfaceTexture),这个ISurfaceTexture是应用程序中的opengl本地窗口SurfaceTextureClient实现ANativeWindow规定的“协议”的基础)。
在getSurfaceTexture中,mOwner是一个指向Layer对象的弱指针,that->mSurfaceTexture指的是Layer中的SurfaceTexture类成员变量,所以函数最终是通过SurfaceTexture::getBufferQueue()来获得ISurfaceTexture。更具体地过程是,当Layer第一次被引用时,在onFirstRef()中会对mSurfaceTexture赋值。因为ISurface(即BSurface)持有这个Layer对象(mOwner),所以当应用程序申请getSurfaceTexture时,它才能间接地向Layer要求取得ISurfaceTexture。我们前面说过,在binder server端,这个接口的实现类就是BufferQueue,如下所示:
/*frameworks/native/libs/gui/SurfaceTexture.cpp*/
sp<BufferQueue> SurfaceTexture::getBufferQueue() const {
Mutex::Autolocklock(mMutex);
return mBufferQueue;
}
函数直接返回了mBufferQueue,因为这个成员变量在SurfaceTexture构造时就已经初始化过了,它指向一个BufferQueue对象。大家一定要记住,ISurfaceTexture的server端实现是BufferQueue,由于命名上的差异,这点很容易搞错。
这样应用程序与BufferQueue的关系就比较明朗了。虽然中间经历了多次跨进程通信,但对于应用程序来说最终只使用到了BufferQueue(通过ISurfaceTexture)。从本小节的内容中,我们也可以从侧面证明如下几个关键点:
(1) 应用程序可以调用createSurface来建立多个Layer,它们是一对多的关系。理由就是createSurface中没有任何机制来限制应用程序的多次调用,相反,它会把一个应用程序多次申请而产生的Layer统一管理,如下:
sp<ISurface> SurfaceFlinger::createSurface(…constsp<Client>& client)
{
sp<LayerBaseClient>layer;
… /*省略的这部分是生成layer的过程,前面已经分析过了*/
if (layer != 0) {…
ssize_t token = addClientLayer(client,layer);//将client与layer记录起来
surfaceHandle =layer->getSurface();
if (surfaceHandle !=0) {…
if (normalLayer !=0) {//只对normal layer生效
Mutex::Autolock _l(mStateLock);
mLayerMap.add(layer->getSurfaceBinder(), normalLayer);
}
}…
}
为应用程序申请的layer,一方面需要告知SurfaceFlinger,另一方面也要记录到各Client内部中,这两个步骤是由addClientLayer()分别调用Client::attachLayer()和SurfaceFlinger::addLayer_l()来完成的。对于SurfaceFlinger,它需要对系统中当前所有的Layer进行Z-order排序,以决定用户所能看到的“画面”是什么样的。对于Client,它则利用内部的mLayers成员变量来一一记录新增(attachLayer)和移除(detachLayer)的图层。
(2) 每个Layer对应一个BufferQueue,换句话说,一个应用程序可能对应多个BufferQueue。Layer没有直接持有BufferQueue,而是由其内部的mSurfaceTexture来管理。
我们以下面这个关系图来结束本小节的学习:
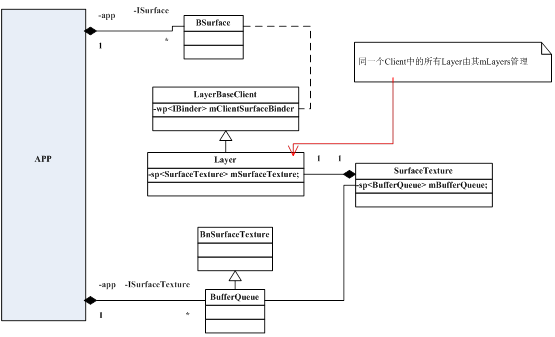
图 11‑19 应用程序与BufferQueue的对应关系
1.1 SurfaceFlinger
从这一小节开始,我们正式切入SurfaceFlinger的分析。为了保持讲解的连贯性,部分内容可能在前面的章节中已经有所涉及了,接下来将会对其中的细节做更多的扩展讲解。
内容组织如下:
l 首先介绍Android 4.1引入的新特性(Project Butter),理解这个项目是必要的,可以说SurfaceFlinger有很大一部分的内容就是围绕它来的
l SurfaceFlinger的启动过程及工作方式
l SurfaceFlinger与BufferQueue及应用程序间的关系
l SurfaceFlinger对VSYNC信号的处理过程(重点)
1.1.1 ProjectButter
直译过来,就是“黄油计划”,为什么叫这个名字呢?这个Project的目的是为了改善用户抱怨最多的Android几大缺陷之一,即UI响应速度——Google希望这一新计划可以让Android系统摆脱UI交互上给人带来的“滞后”感,而能像黄油一般“顺滑”。Google在2012年的I/O大会上宣布了这一计划,并在Android 4.1中正式搭载了实现机制。
Butter中有两个重要的组成部分,即VSync和Triple Buffering。下面先分别介绍引入它们的原因。
喜欢玩游戏或者看电影的读者可能遇到过这样的情形:
Ø 某些游戏场面好像是几个场景“拼凑”而成的
Ø 电影画面不连贯,好像被“割裂”了
这样子描述有点抽象,我们引用widipedia上的一张图来看下实际的效果:

图 11‑20 Screen Tearing实例
引自http://en.wikipedia.org/wiki/File:Tearing_%28simulated%29.jpg
我们把这种显示错误称为“screentearing”,那么为什么会出现这样的情况呢?
相信大家都能得出结论,那就是屏幕上显示的画面实际上来源于多个“帧”。
在一个典型的显示系统中,frame buffer代表了屏幕即将要显示的一帧画面。假如CPU/GPU绘图过程与屏幕刷新所使用的buffer是同一块,那么当它们的速度不同步的时候,是很可能出现类似的画面“割裂”的。举个具体的例子来说,假设显示器的刷新率为66Hz,而CPU/GPU绘图能力则达到100Hz,也就是它们处理完成一帧数据分别需要0.015秒和0.01秒。
以时间为横坐标来描述接下来会发生的事情,如下图:
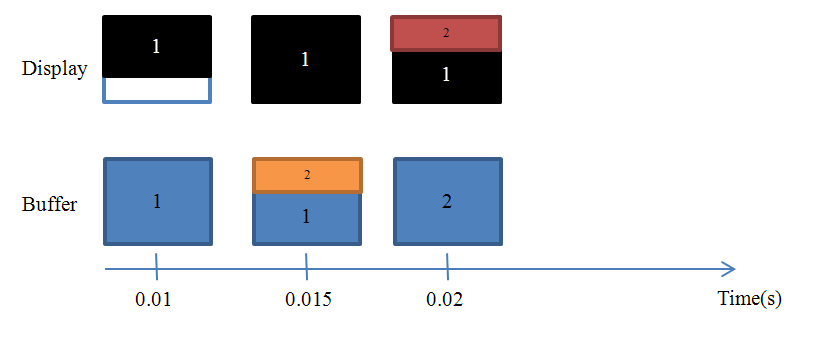
图 11‑21 Screen Tearing产生过程分析
上半部分的方框表示在不同的时间点时显示屏的内容(加深的部分),下半部分则是同一时间点时frame buffer中的数据状态,编号表示第几个frame,不考虑清屏。
· 0.01秒
由于两者速率相差不小,此时buffer中已经准备好了第1帧数据,显示器只显示了第1帧画面的2/3
· 0.015秒
第1帧画面完整地显示出来了,此时buffer中有1/3的部分已经被填充上第2帧数据了
· 0.02秒
Buffer中已经准备好第2帧数据,而显示屏出现了screen tearing,有三分之一是第2帧内容,其余的则属于第1帧画面
在单缓冲区的情况下,这个问题很难规避。所以之前我们介绍了双缓冲技术,基本原理就是采用两块buffer。一块back buffer用于CPU/GPU后台绘制,另一块framebuffer则用于显示,当back buffer准备就绪后,它们才进行交换。不可否认,doublebuffering可以在很大程度上降低screen tearing错误,但是它是万能的吗?
一个需要考虑的问题是我们什么时候进行两个缓冲区的交换呢?假如是back buffer准备完成一帧数据以后就进行,那么如果此时屏幕还没有完整显示上一帧内容的话,肯定是会出问题的。看来只能是等到屏幕处理完一帧数据后,才可以执行这一操作了。
我们知道,一个典型的显示器有两个重要特性,行频和场频。行频(Horizontal ScanningFrequency)又称为“水平扫描频率”,是屏幕每秒钟从左至右扫描的次数; 场频(Vertical Scanning Frequency)也称为“垂直扫描频率”,是每秒钟整个屏幕刷新的次数。由此也可以得出它们的关系:行频=场频*纵坐标分辨率。
当扫描完一个屏幕后,设备需要重新回到第一行以进入下一次的循环,此时有一段时间空隙,称为VerticalBlanking Interval(VBI)。大家应该能想到了,这个时间点就是我们进行缓冲区交换的最佳时间。因为此时屏幕没有在刷新,也就避免了交换过程中出现screentearing的状况。VSync(垂直同步)是VerticalSynchronization的简写,它利用VBI时期出现的vertical sync pulse来保证双缓冲在最佳时间点才进行交换。
所以说V-sync这个概念并不是Google首创的,它在早些年前的PC机领域就已经出现了。不过Android 4.1给它赋予了新的功用,稍后就可以看到。
上面我们讨论的情况基于的假设是绘图速度大于显示速度,那么如果反过来呢?
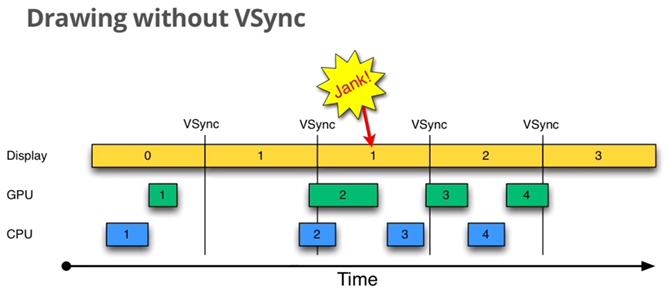
图 11‑22绘图过程没有采用VSync同步的情况
引用自Google2012 I/O,作者Chet Haase和Romain Guy,AndroidUI Toolkit Engineers
这个图中有三个元素,Display是显示屏幕,GPU和CPU负责渲染帧数据,每个帧以方框表示,并以数字进行编号,如0、1、2等等。VSync用于指导双缓冲区的交换。
以时间的顺序来看下将会发生的异常:
Step1. Display显示第0帧数据,此时CPU和GPU渲染第1帧画面,而且赶在Display显示下一帧前完成
Step2. 因为渲染及时,Display在第0帧显示完成后,也就是第1个VSync后,正常显示第1帧
Step3. 由于某些原因,比如CPU资源被占用,系统没有及时地开始处理第2帧,直到第2个VSync快来前才开始处理
Step4. 第2个VSync来时,由于第2帧数据还没有准备就绪,显示的还是第1帧。这种情况被Android开发组命名为“Jank”。
Step5. 当第2帧数据准备完成后,它并不会马上被显示,而是要等待下一个VSync。
所以总的来说,就是屏幕平白无故地多显示了一次第1帧。原因大家应该都看到了,就是CPU没有及时地开始着手处理第2帧的渲染工作,以致“延误军机”。 Android系统中一直存在着这个问题,即便是上一版本的Ice Cream Sandwich。
从Android 4.1Jelly Bean开始,VSync得到了进一步的应用。系统在收到VSync pulse后,将马上开始下一帧的渲染。
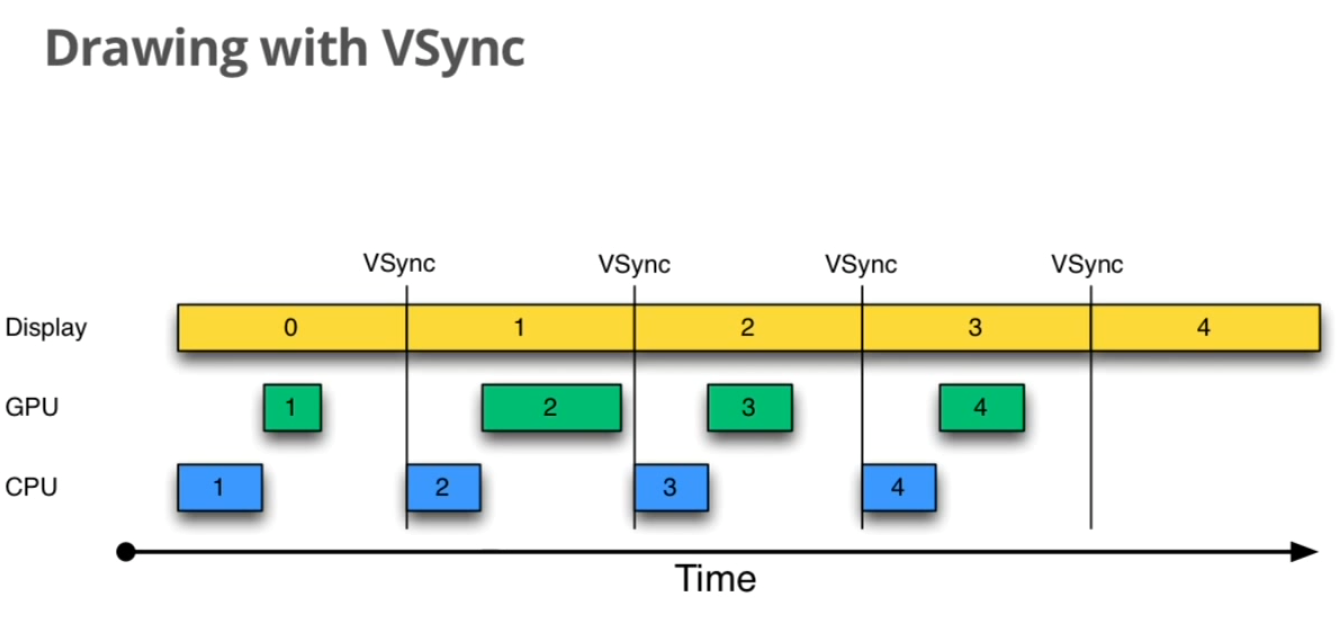
图 11‑23 整个显示系统都以VSync进行同步
如上图所示,一旦VSync出现后,CPU不再犹豫,紧接着就开始执行buffer的准备工作。大部分的Android显示设备刷新率是60Hz,这也就意味着每一帧最多只能有1/60=16ms左右的准备时间。假如CPU/GPU的FPS(FramesPer Second)高于这个值,那么这个方案是完美的,显示效果将很好。
可是我们没有办法保证所有设备的硬件配置都能达到要求。假如CPU/GPU的性能无法满足上图的条件,又是什么情况呢?
在分析这一问题之前,我们先来看下正常情况下,采用双缓冲区的系统的运行情况。
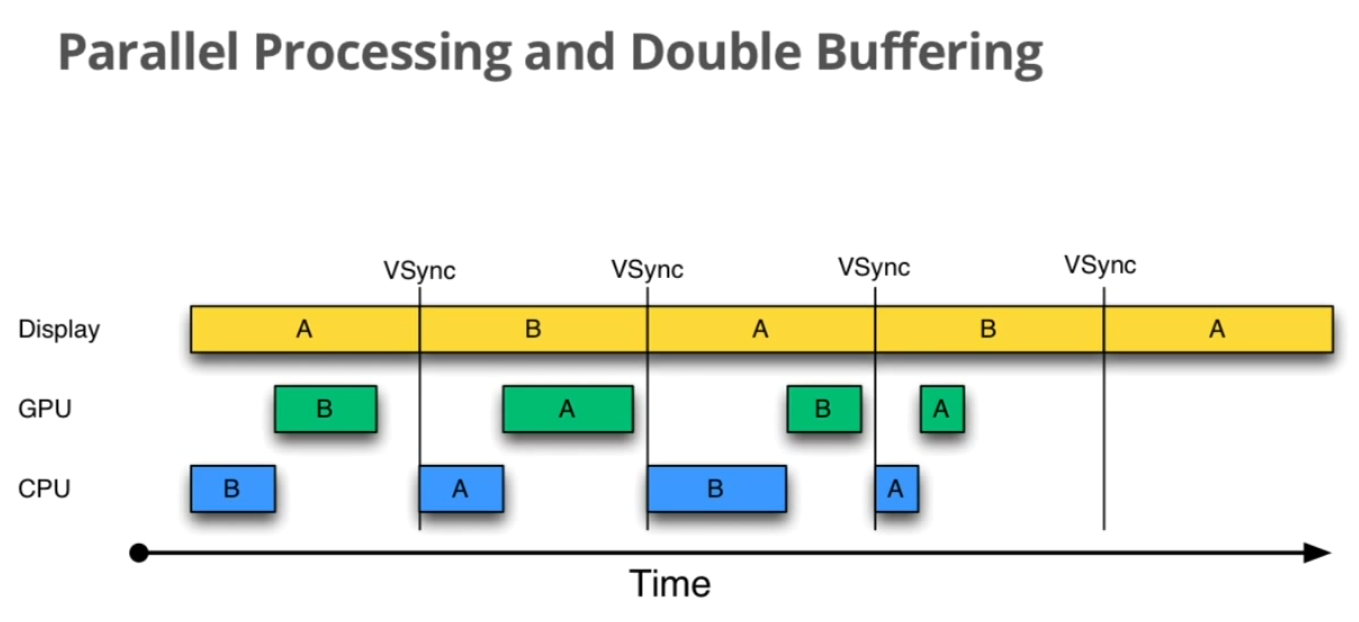
图 11‑24 双缓冲展示
这个图采用了双缓冲,以及前面介绍的VSync,可以看到整个过程还是相当不错的,虽然CPU/GPU处理所用的时间时短时长,但总的来说都在16ms以内,因而不影响显示效果。A和B分别代表两个缓冲区,它们不断地交换来正确显示画面。
现在我们可以继续分析FPS低于屏幕刷新率的情况。
如下图所示:
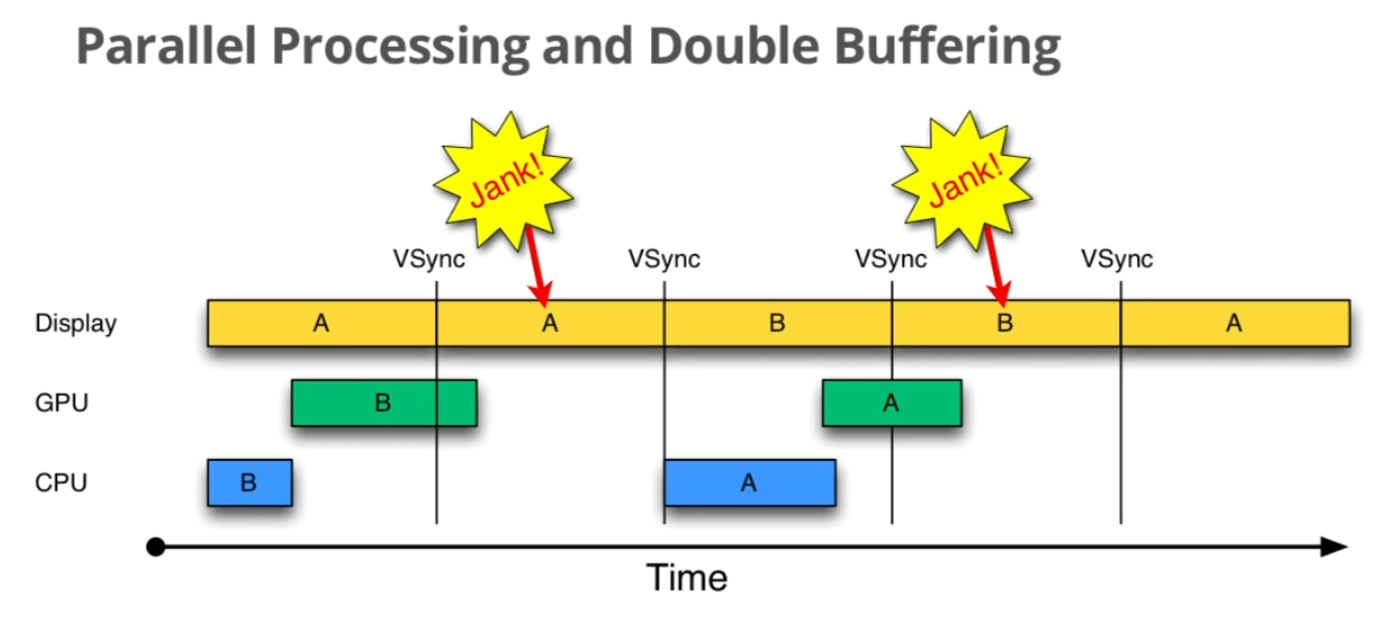
图 11‑25 FPS低于屏幕刷新率的情况
当CPU/GPU的处理时间超过16ms时,第一个VSync到来时,缓冲区B中的数据还没有准备好,于是只能继续显示之前A缓冲区中的内容。而B完成后,又因为缺乏VSync pulse信号,它只能等待下一个signal的来临。于是在这一过程中,有一大段时间是被浪费的。当下一个VSync出现时,CPU/GPU马上执行操作,此时它可操作的buffer是A,相应的显示屏对应的就是B。这时看起来就是正常的。只不过由于执行时间仍然超过16ms,导致下一次应该执行的缓冲区交换又被推迟了——如此循环反复,便出现了越来越多的“Jank”。
那么有没有规避的办法呢?
很显然,第一次的Jank看起来是没有办法的,除非升级硬件配置来加快FPS。我们关注的重点是被CPU/GPU浪费的时间段,怎么才能充分利用起来呢?分析上述的过程,造成CPU/GPU无事可做的假象是因为当前已经没有可用的buffer了。换句话说,如果增加一个buffer,情况会不会好转呢?
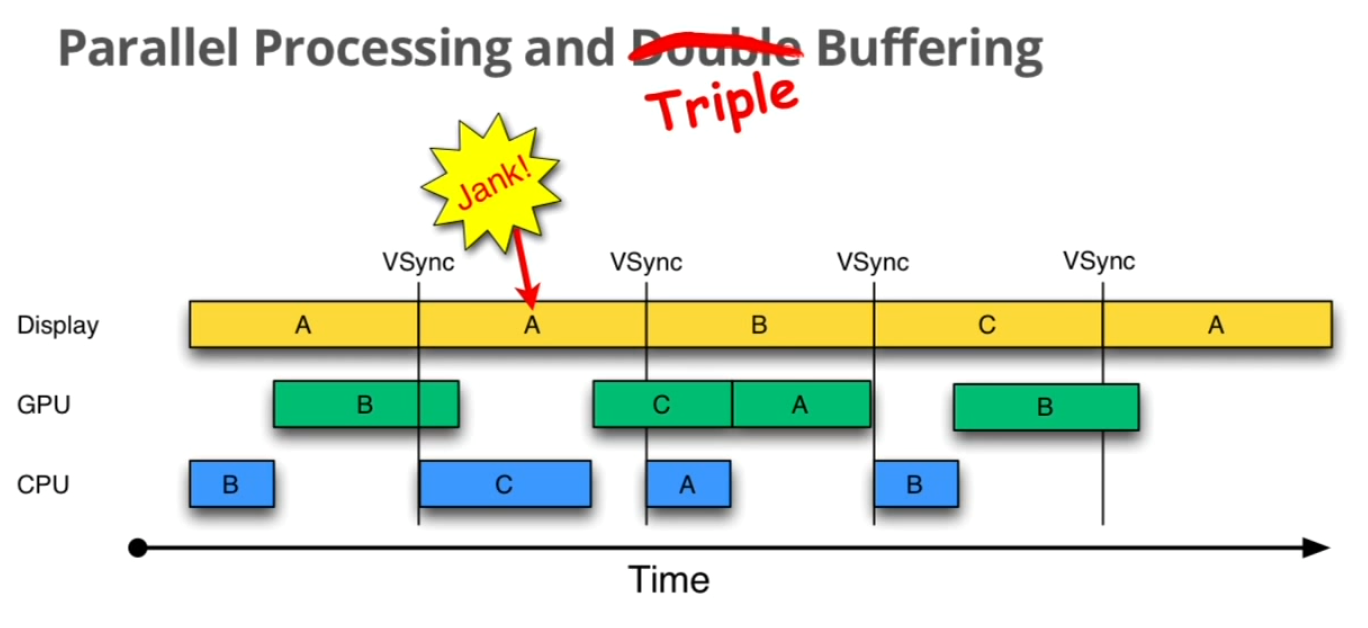
图 11‑26 Triple Buffering
Triple Buffering是MultipleBuffering的一种,指的是系统使用3个缓冲区用于显示工作。我们来逐步分析下这个新机制是否有效。首先和预料中的一致,第一次“Jank”无可厚非。不过让人欣慰的是,当第一次VSync发生后,CPU不用再等待了,它会使用第三个buffer C来进行下一帧数据的准备工作。虽然对缓冲区C的处理所需时间同样超过了16ms,但这并不影响显示屏——第2次VSync到来后,它选择buffer B进行显示;而第3次VSync时,它会接着采用C,而不是像double buffering中所看到的情况一样只能再显示一遍B了。这样子就有效地降低了系统显示错误的机率。
前面小节我们看到BufferQueue中最多有32个BufferSlot,不过在实际使用时具体值是可以设置的。
· TARGET_DISABLE_TRIPLE_BUFFERING
这个宏用于disable triple buffering。如果宏打开的话,Layer.cpp在onFirstRef有如下操作:
#ifdefTARGET_DISABLE_TRIPLE_BUFFERING
#warning"disabling triple buffering"
mSurfaceTexture->setBufferCountServer(2);
#else
mSurfaceTexture->setBufferCountServer(3);
#endif
也就是将mSurfaceTexture(即BufferQueue)中的mServerBufferCount设为2,否则就是3
· 对于应用程序来说,它也可以通过ISurfaceTexture::setBufferCount来告诉BufferQueue它希望的Slot值,对应的则是mClientBufferCount。默认情况下这个变量是0,表示应用端不关心到底有多少buffer可用。
· BufferQueue中还有另一个变量mBufferCount,默认值是MIN_ASYNC_BUFFER_SLOTS。在具体的实现中,以上这三个变量都是要考虑到的,BufferQueue会通过权衡各个值来选择最佳的解决方式
请大家务必理解本小节的几个场景分析,明白采用TripleBuffering、VSync机制的原因。带着这些理解进入SurfaceFlinger的学习,可以帮助我们“有的放矢”,对源码的分析也能事半功倍。
1.1.1 SurfaceFlinger的启动
SurfaceFlinger的启动和ServiceManager有点类似,它们都属于系统的底层支撑服务,必需在设备开机的早期就运行起来。
/*frameworks/base/cmds/system_server/library/System_init.cpp*/
extern "C" status_t system_init()
{…
property_get("system_init.startsurfaceflinger", propBuf,"1");
if (strcmp(propBuf,"1") == 0) {
SurfaceFlinger::instantiate();
}…
这个System_init.cpp会被编译到libsystem_server库中,然后由SystemServer在JNI层进行加载调用,从而启动包括SurfaceFlinger、SensorService等在内的系统服务。
和AudioFlinger/AudioPolicyService看到的情况一样,它调用instantiate来创建一个binder server,名称为“SurfaceFlinger”。而且强指针的特性让它在第一次被引用时会调用onFirstRef:
void SurfaceFlinger::onFirstRef()
{
mEventQueue.init(this);//初始化事件队列
run("SurfaceFlinger",PRIORITY_URGENT_DISPLAY);//启动一个新的业务线程
mReadyToRunBarrier.wait();//等待新线程启动完毕
}
成员变量mEventQueue是一个MessageQueue类型的对象,我们在进程章节已经详细分析过消息队列与Looper、Handler等类的使用,大家可以先回头参考下(虽然Java层的这些类与SurfaceFlinger中用到的有一定差异,但其本质原理是一样的)。既然有消息队列,那就一定会有配套的事件处理器Handler以及循环体Looper,这些是在MessageQueue::init函数中创建的,即:
/*frameworks/native/services/surfaceflinger/MessageQueue.cpp*/
void MessageQueue::init(const sp<SurfaceFlinger>& flinger)
{
mFlinger = flinger;
mLooper = newLooper(true);
mHandler = newHandler(*this);
}
也就是说这个MessageQueue类不但提供了消息队列,其内部还囊括了消息的处理机制,可以说是个“大杂烩”。那么这个Looper会在什么时候运行起来呢?显然SurfaceFlinger需要先自行创建一个新的线程来承载这一“业务”,否则就会阻塞SystemServer的主线程,这一点和AudioFlinger是有区别的。函数最后的mReadyToRunBarrier.wait()也可以证明这一点——mReadyToRunBarrier在等待一个事件,在事件没有发生前其所在的线程就会处于等待状态。这是Android系统里两个线程间的一种典型交互方式。举个例子来说,A线程将启动B线程,并且A接下来的工作会依赖于B进行。换句话说,A必顺要等到B说“好了,我已经ok”了,它才能继续往下走,否则就会出错。由此可见,SurfaceFlinger新启动的这个线程中一定还会调用mReadyToRunBarrier。
这样我们也能推断出SurfaceFlinger一定是继承自Thread线程类的,如下所示:
class SurfaceFlinger :
publicBinderService<SurfaceFlinger>,
…
protected Thread
所以上面代码中可以调用Thread::run()方法,进而启动一个名为“SurfaceFlinger”的线程,优先级别为PRIORITY_URGENT_DISPLAY。这个优先级是在ThreadDefs.h中定义的,如下表所示:
表格 11‑6 Android系统的线程优先级定义
| Priority | Value | Description |
| ANDROID_PRIORITY_LOWEST | 19 | 可以使用最后的 |
| ANDROID_PRIORITY_BACKGROUND | 10 | 用于background tasks |
| ANDROID_PRIORITY_NORMAL | 0 | 大部分线程都以这个优先级运行 |
| ANDROID_PRIORITY_FOREGROUND | -2 | 用户正在交互的线程 |
| ANDROID_PRIORITY_DISPLAY | -4 | UI主线程 |
| ANDROID_PRIORITY_URGENT_DISPLAY | -8 | 这个值由HAL_PRIORITY_URGENT_DISPLAY来指定,当前版本中是-8。只在部分紧急状态下使用 |
| ANDROID_PRIORITY_AUDIO | -16 | 正常情况下的声音线程 |
| ANDROID_PRIORITY_URGENT_AUDIO | -19 | 声音线程(通常情况不用) |
| ANDROID_PRIORITY_HIGHEST | -20 | 最高优先级,禁止使用 |
| ANDROID_PRIORITY_DEFAULT | 0 | 默认情况下就是ANDROID_PRIORITY_NORMAL |
| ANDROID_PRIORITY_MORE_FAVORABLE | -1 | 在上述优先级的基础上,用于加大优先级 |
| ANDROID_PRIORITY_LESS_FAVORABLE | +1 | 在上述优先级的基础上,用于减小优先级 |
数值越大的,优先级越小。因为各等级间的数值并不是连续的,我们可以通过ANDROID_PRIORITY_MORE_FAVORABLE(-1)来适当地提高优先级,或者是利用ANDROID_PRIORITY_LESS_FAVORABLE(+1)来降低优先级。
由此可见,SurfaceFlinger工作线程所采用的优先级是相对较高的。这样做是必然的,因为屏幕显示无疑是人机交互中最直观的用户体验,任何滞后的响应速度都将大大降低产品的吸引力。
在执行了run()以后,Thread会自动调用threadLoop()接口,即:
bool SurfaceFlinger::threadLoop()
{
waitForEvent();
return true;
}
相当简洁的两句话,所有SurfaceFlinger接下来要执行的工作都涵括在这里了。其中waitForEvent()是SurfaceFlinger中的成员函数,它进一步调用mEventQueue.waitMessage():
void MessageQueue::waitMessage() {
do {
IPCThreadState::self()->flushCommands();
int32_t ret =mLooper->pollOnce(-1);
switch (ret) {
caseALOOPER_POLL_WAKE:
caseALOOPER_POLL_CALLBACK:
continue;
caseALOOPER_POLL_ERROR:
ALOGE("ALOOPER_POLL_ERROR");
caseALOOPER_POLL_TIMEOUT:
// timeout(should not happen)
continue;
default:
// should nothappen
ALOGE("Looper::pollOnce() returned unknown status %d", ret);
continue;
}
} while (true);
}
可以看到程序在这里进入了一个死循环,而且即便pollOnce的执行结果是ALOOPER_POLL_TIMEOUT,也同样不会跳出循环。这是Android系统在对待系统级严重错误时的一种普遍态度——一旦发生,就没救了,听天由命吧。。。
下面这句将在内部调用MessageQueue::mHandler来处理消息:
mLooper->pollOnce(-1);
注意pollOnce函数同样使用了一个死循环,它不断地取消息进行处理,关系如下:
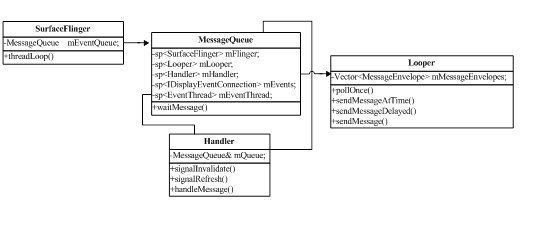
图 11‑27 SurfaceFlinger中的消息循环机制
实际上SurfaceFlinger中的MessageQueue类不应该叫这个名字,因为会和我们传统的消息队列产生混淆和歧义。变量mEventQueue是消息循环处理机制的管理者,其下包含了一个Looper和一个Handler。Looper采用的是/frameworks/native/libs/utils/Looper.cpp中的实现,SurfaceFlinger没有重新定义这个类。Looper中的mMessageEnvelope才是真正存储消息的地方。
太绕了,再好的设计也应该考虑可读性L
这样子就构建了一个完整的循环消息处理框架,SurfaceFlinger就是基于这个框架完成来自系统中各个程序的显示请求的。大家可能会有疑问,mHandler是由MessageQueue在init()中直接通过newHandler()生成的,这样的话如何能处理特定的SurfaceFlinger消息请求呢?个人感觉有这个困惑也是由于Handler类取名不当引起的。实际上此Handler并非我们经常看到的那个Handler,这里的Handler是MessageQueue中自定义的一个事件处理器,也就是说它是专门为SurfaceFlinger设计的。
/*frameworks/native/services/surfaceflinger/MessageQueue.cpp*/
void MessageQueue::Handler::handleMessage(const Message&message) {
switch (message.what) {
case INVALIDATE:
android_atomic_and(~eventMaskInvalidate, &mEventMask);
mQueue.mFlinger->onMessageReceived(message.what);
break;
case REFRESH:
android_atomic_and(~eventMaskRefresh, &mEventMask);
mQueue.mFlinger->onMessageReceived(message.what);
break;
}
}
如上代码段所示,mHandler当收到INVALIDATE和REFRESH请求时,进一步回调了SurfaceFlinger中的onMessageReceived。等于是绕了一个大圈,又回到SurfaceFlinger中了。
我们到目前为止还是没看到SurfaceFlinger是如何通知SystemServer线程解除等待的。这个工作是在下面的函数完成的:
status_t SurfaceFlinger::readyToRun()
{…
mReadyToRunBarrier.open();//好了,现在可以解禁线程A了
}
函数readyToRun是在一个线程进入run循环前调用的,它为SurfaceFlinger的正常工作提供了各种必要的基础。我们在后续小节还会看到其中的更多内容,这里先分析与消息处理有关的部分。前面所说的mReadyToRunBarrier果然在这里又被调用了,open()是告诉所有正在等待的线程可以继续运行了。Barrier类内部实际上也是使用了Condition::broadcast()、Condition::wait()等常规互斥方法,只是加了一层封装而已。
1.1.1 SurfaceComposerClient
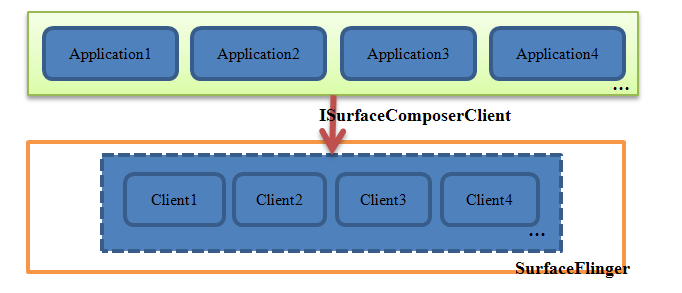
图 11‑28 每个应用程序在SurfaceFlinger中都对应一个Client
SurfaceFlinger运行于SystemServer这一系统进程中,需要UI界面显示的应用程序则通过binder服务与它进行跨进程通信。在音频系统的学习中,每一个AudioTrack在AudioFlinger中都可以找到一个对应的Track实现。这种设计方式同样适用于显示系统,即任何有UI界面的程序都在SurfaceFlinger中有且仅有一个Client实例。
Client这个类名并没有完全表达出它的含义,因为在Android系统的很多其它地方你都可以找到同名的类。应用程序与SurfaceFlinger间的接口是ISurfaceComposerClient,Client的父类是BnSurfaceComposerClient,它是这一接口的本地端实现。
/*frameworks/native/include/gui/ISurfaceComposerClient.h*/
class ISurfaceComposerClient : public IInterface
{ …
virtual sp<ISurface>createSurface( surface_data_t* data, const String8& name, DisplayIDdisplay,
uint32_t w,uint32_t h, PixelFormat format, uint32_t flags) = 0;
virtual status_t destroySurface(SurfaceID sid) = 0;
};
接口中最重要的两个方法createSurface()和destroySurface()分别用于向SurfaceFlinger申请和销毁一个ISurface。那么既然有了Client,为什么还要再引出另一个binder对象呢?
这是因为每个SurfaceFlinger的客户程序都只会有唯一一个Client连接,但它们内部拥有的Surface数量却很可能有多个。通常情况下,同一个Activity中的UI布局共用系统分配的Surface进行绘图,但像SurfaceView这种UI组件就是特例——它独占一个Surface进行绘制。举个例子来说,如果我们制作一个带SurfaceView的视频播放器,其所在的应用程序最终就会有不止一个的Surface存在。这样设计是必须的,因为播放视频对刷新频率要求很高,采用单独的Surface既可以保证视频的流畅度,也同时能让用户的交互动作(比如触摸屏操作)及时得到响应。
Client的继承关系图如下所示:

图 11‑29 ISurfaceComposerClient的本地端实现
1. SurfaceFlinger::createConnection
由于Client属于匿名binder服务,外界的进程不可能直接获取到,因而首先需要借助SurfaceFlinger这一实名binder Service,源码实现如下:
sp<ISurfaceComposerClient> SurfaceFlinger::createConnection()
{
sp<ISurfaceComposerClient> bclient;
sp<Client>client(new Client(this));
status_t err =client->initCheck();
if (err == NO_ERROR) {
bclient = client;
}
return bclient;
}
首先新建一个Client本地对象,initCheck初始化完成后如果没有错误的话,就可以ISurfaceComposerClient强指针返回。其中initCheck在目前版本中并没有做本质工作,它会直接返回NO_ERROR。
2. Client::createSurface
Client只是建立起了UI程序与SurfaceFlinger间的纽带,真正的图形层(Surface)创建需要另外申请,即调用Client提供的如下接口:
/*frameworks/native/services/surfaceflinger/SurfaceFlinger.cpp*/
sp<ISurface> Client::createSurface(…)
{
class MessageCreateSurface: public MessageBase {…
SurfaceFlinger*flinger;
Client* client;
…
public:
MessageCreateSurface(…): flinger(flinger), params(params),client(client), name(name),
display(display), w(w), h(h), format(format), flags(flags)
{//构造函数主要是对成员变量进行初始化
}
sp<ISurface>getResult() const { return result; }
virtual bool handler(){
result =flinger->createSurface(params, name, client, display, w, h, format, flags);
return true;
}
};
sp<MessageBase> msg = newMessageCreateSurface(mFlinger.get(),params, name, this,
display,w, h, format, flags);
mFlinger->postMessageSync(msg); //将这一Message推送到SurfaceFlinger线程中
return static_cast<MessageCreateSurface*>(msg.get() )->getResult();
}
这个函数比较特别的地方,是它先在内部创建了一个MessageCreateSurface类,剩余部分代码就是围绕这个类展开的。那么MessageCreateSurface有什么作用呢?从名称上看,它应该和Message有关,其父类是MessageBase,定义在MessageQueue.h中,如下关系图所示:
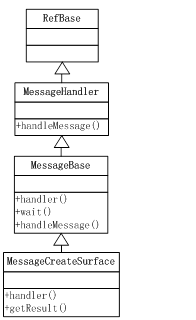
图 11‑30 MessageCreateSurface
从这个继承图中可以大概看出一点端倪,即MessageCreateSurface是一个Message的承载体,并且内部提供了处理这条Message的handler()函数。这是不是和Java层的Handler很像?可能也是这个原因,所以其“祖谱”中有一个类取名为MessageHandler。回过头来看createSurface中的最后几行,程序将一个MessageCreateSurface对象msg发送到了SurfaceFlinger中:
mFlinger->postMessageSync(msg);
为什么要这么做呢?
大家还记不记得在进程章节讲述Message、Looper、Handler的关系时曾经举过一个例子,为了方便阅读我们再把它列出来:
“。。。
打个比方来说,某天你和朋友去健身房运动,正当你在跑步机上气喘吁吁时,旁边有个朋友跟你说:“哥们,最近手头紧,借点钱花花”。那么这时候你就有两个选择:
Ø 马上执行
这就意味着你要从跑步机上下来,问清借多少钱,然后马上打开电脑进行转账汇款
Ø 稍后执行
上面的方法在某些场合下是有用的,不过大部分情况下“借钱”这种事并不是刻不容缓的,因而你可以跟你朋友说:“借钱没问题,你先和我秘书约时间,改天我们具体谈细节”。那么在这种情况下,这个“借钱事件”就通过秘书这个MessageQueue进入了排队,所以你并不需要从跑步机上下来,中断健身运动。后期秘书会一件件通知你MessageQueue上的待办事宜(当然你也可以主动问秘书),直到“借钱事件”时你才需要和这位朋友进一步商谈。在一些场合下这样的处理方式是合情合理的。比如说健身房一小时花费是10万,而你朋友只借一百块,那么在这时处理这一事件就不合理了
”
这个例子在createSurface()这个场景中也是同样适用的,如下图所示:
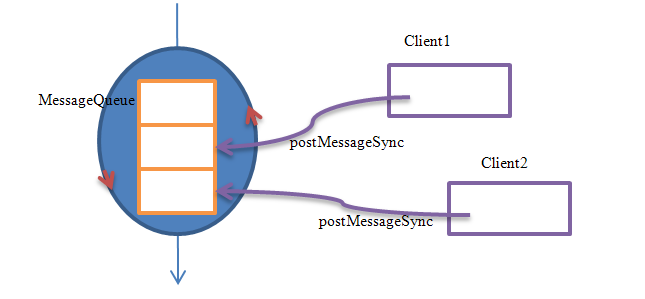
图 11‑31 createSurface中的消息投递与执行
函数postMessageSync是SurfaceFlinger提供的一个接口,它通过mEventQueue将Msg压入队列中,并且还会进入等待状态,如下:
status_t SurfaceFlinger::postMessageSync(constsp<MessageBase>& msg, nsecs_t reltime, uint32_t flags) {
status_t res =mEventQueue.postMessage(msg, reltime);
if (res == NO_ERROR) {
msg->wait();
}
return res;
}
MessageBase::wait()调用内部的Barrier::wait来实现等待,这意味着发送消息的线程将暂时停止执行,那么什么时候才能继续呢?显然得有人唤醒它才行。这个唤醒的地方隐藏在MessageBase::handleMessage()中,即:
/*frameworks/native/services/surfaceflinger/MessageQueue.cpp*/
void MessageBase::handleMessage(const Message&) {
this->handler();
barrier.open();
};
这其中的流程有点乱,我们以下图做下整理:
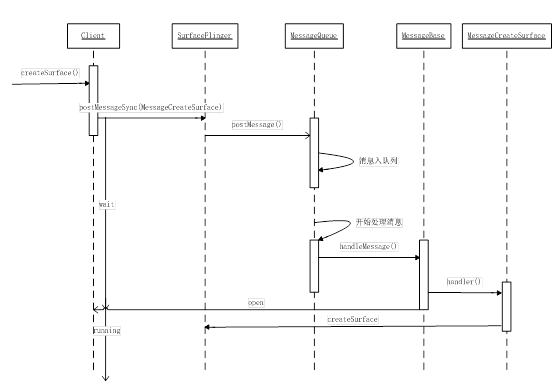
图 11‑32 Client::createSurface流程图
另外SurfaceFlinger中还有一个相似的消息推送函数postMessageAsync,从名称上就可以看出它是要求异步执行的,通俗来讲就是推送过后就直接返回了,无需等待执行结果,读者可以自行分析下源码。
绕了一圈后,终于轮到SurfaceFlinger工作线程来处理createSurface()了,这个函数我们在前面讲解“应用程序与BufferQueue的关系”时已经详细分析过了,这里不再赘述。
1.1 VSync的产生和处理
前面小节ProjectButter中我们学习了Android 4.1显示系统中的新特性,其中一个就是加入了VSync同步。我们从理论的角度分析了采用这一机制的必要性和运作机理,那么SurfaceFlinger具体是如何实施的呢?
先来想一下有哪些东西要考虑:
· VSync信号的产生和分发
如果有硬件主动发出这一信号,那是最好的了;否则就得通过软件定时模拟来产生
· VSync信号的处理
当信号产生后,SurfaceFlinger如何在最短的时间内响应,具体处理流程是怎么样子的
1.1.1 VSync信号的产生和分发
在Android源码surfaceflinger目录下有一个displayhardware文件夹,其中HWComposer的主要职责之一,就是用于产生VSync信号。
/*frameworks/native/services/surfaceflinger/displayhardware/HWComposer.cpp*/
HWComposer::HWComposer(const sp<SurfaceFlinger>& flinger,EventHandler& handler, nsecs_t refreshPeriod)
: mFlinger(flinger), mModule(0), mHwc(0), mList(0), mCapacity(0),mNumOVLayers(0),
mNumFBLayers(0), mDpy(EGL_NO_DISPLAY),mSur(EGL_NO_SURFACE),
mEventHandler(handler),mRefreshPeriod(refreshPeriod),
mVSyncCount(0),mDebugForceFakeVSync(false)
{
charvalue[PROPERTY_VALUE_MAX];
property_get("debug.sf.no_hw_vsync", value, "0"); //系统属性
mDebugForceFakeVSync =atoi(value);
bool needVSyncThread =false;//是否需要软件模拟VSync
int err = hw_get_module(HWC_HARDWARE_MODULE_ID, &mModule);//加载HAL模块
if (err == 0) {
err = hwc_open(mModule, &mHwc);//打开module
if (err == 0) {
if(mHwc->registerProcs) { //注册硬件设备事件回调
mCBContext.hwc= this;
mCBContext.procs.invalidate = &hook_invalidate;
mCBContext.procs.vsync = &hook_vsync;
mHwc->registerProcs(mHwc, &mCBContext.procs);
memset(mCBContext.procs.zero, 0, sizeof(mCBContext.procs.zero));
}
if(mHwc->common.version >= HWC_DEVICE_API_VERSION_0_3) {
if(mDebugForceFakeVSync) {//用于调试
mHwc->methods->eventControl(mHwc, HWC_EVENT_VSYNC, 0);
}
} else {//有可能支持VSync的硬件模块是这个版本以后才加入的,老版本仍然需要软件模拟
needVSyncThread = true;
}
}
} else {
needVSyncThread =true; //硬件模块打开失败,只能用软件模拟
}
if (needVSyncThread) {
mVSyncThread = new VSyncThread(*this);//创建一个产生VSync信号的线程
}
}
这个函数的核心就是决定VSync的“信号发生源”——硬件或者软件模拟。
假如当前系统可以成功加载HWC_HARDWARE_MODULE_ID=“hwcomposer”,并且通过这个库模块能顺利打开设备(hwc_composer_device_t),其版本号又大于HWC_DEVICE_API_VERSION_0_3的话,我们就采用“硬件源”(此时needVSyncThread为false),否则需要创建一个新的VSync线程来模拟产生信号。
(1)硬件源
如果mHwc->registerProcs不为空的话,我们注册硬件回调mCBContext.procs。定义如下:
struct cb_context{
callbacksprocs;
HWComposer*hwc;
};
调用registerProcs()时,传入的参数是&mCBContext.procs。后期当有事件产生时,比如vsync或者invalidate,硬件模块将分别通过procs.vsync和procs.invalidate来通知HWComposer。
void HWComposer::hook_vsync(struct hwc_procs* procs, int dpy,int64_t timestamp) {
reinterpret_cast<cb_context *>(procs)->hwc->vsync(dpy,timestamp);
}
上面这个函数中,procs即前面的&mCBContext.procs,从指针地址上看它和&mCBContext是一致的,因而我们可以强制类型转换为cb_context来进行操作,并由此访问到hwc中的vsync实现:
void HWComposer::vsync(int dpy, int64_t timestamp) {
mEventHandler.onVSyncReceived(dpy, timestamp);
}
HWComposer将VSync信号直接通知给mEventHandler,这个Handler由HWComposer构造时传入,换句话说,我们需要看下是谁创建了HWComposer。
/*frameworks/native/services/surfaceflinger/displayhardware/DisplayHardware.cpp*/
void DisplayHardware::init(uint32_t dpy)
{…
mHwc = newHWComposer(mFlinger, *this, mRefreshPeriod);
从这里可以看出来,HWComposer中的mEventHandler就是DisplayHardware对象,所以后者必须要继承自HWComposer::EventHandler,以此处理产生的onVSyncReceived事件。
(2)软件源
软件源和硬件源的最大区别是它需要启动一个新线程VSyncThread,其运行优先级与SurfaceFlinger的工作线程是一样的,都是-9。从理论的角度讲,任何通过软件定时来实现的机制都不可能是100%可靠的,即使优先级再高也可能出现延迟和意外。不过如果“不可靠”的机率很小,而且就算出现意外时不至于是致命错误,那么还是可以接受的。所以说VSyncThread从实践的角度来讲,的确起到了很好的作用。
bool HWComposer::VSyncThread::threadLoop() {
/*Step1. 系统是否使能了VSync信号发生机制*/
{ // 自动锁控制范围
Mutex::Autolock_l(mLock);
while (!mEnabled) {//VSync信号开关
mCondition.wait(mLock);
}
}
/*Step2. 计算产生VSync信号的时间*/
const nsecs_t period = mRefreshPeriod;//信号的产生间隔
const nsecs_t now =systemTime(CLOCK_MONOTONIC);
nsecs_t next_vsync =mNextFakeVSync;//产生信号的时间
nsecs_t sleep = next_vsync- now; //需要休眠的时长
if (sleep < 0) {//已经过了时间点
sleep = (period - ((now - next_vsync) %period));
next_vsync = now +sleep;
}
mNextFakeVSync =next_vsync + period; //再下一次的VSync时间
struct timespec spec;
spec.tv_sec = next_vsync / 1000000000;
spec.tv_nsec = next_vsync% 1000000000;
int err;
do {
err = clock_nanosleep(CLOCK_MONOTONIC, TIMER_ABSTIME, &spec, NULL);//进入休眠
} while (err<0&& errno == EINTR);
if (err == 0) {
mHwc.mEventHandler.onVSyncReceived(0, next_vsync);//和硬件源是一样的回调
}
return true;
}
Step1@ VSyncThread::threadLoop. 关于自动锁的使用我们已经分析过很多次了,不再赘述。这里要注意的是mEnabled这个变量,它是用于控制是否产生VSync信号的一个使能变量。当系统希望关闭VSync信号发生源时,调用VSyncThread::setEnabled(false),否则传入true。假如mEnabled为false时,VSyncThread就处于等待状态,直到有人再次使能这个线程。
Step2@ VSyncThread::threadLoop. 接下来的代码用于真正产生一个VSync信号。可以想象一下,无非就是这些步骤:
· 计算下一次产生VSync信号的时间
· 进入休眠
· 休眠时间到了后,就代表应该发出VSync信号了,通知感兴趣的人
· 循环往复
变量mRefreshPeriod指定了产生VSync信号的间隔。它是在DisplayHardware::init中计算出来的:
mRefreshPeriod = nsecs_t(1e9 / mRefreshRate);
如果mRefreshRate为60Hz的话,mRefreshPeriod就差不多是16ms。
因为mNextFakeVSync代表的是“下一次”产生信号的时间点,所以首先将next_vsync=mNextFakeVSync。接着计算sleep,也就是离产生信号的时间点还有多长(同时也是需要休眠的时间)。那么如果sleep的结果小于0呢?代表我们已经错过了这一次产生信号的最佳时间点,这是有可能发生的。在这种情况下,就计算下一次最近的VSync离现在还剩多少时间,公式如下:
sleep = (period - ((now - next_vsync) % period));
我们以下图来表述下采用这个公式的依据:
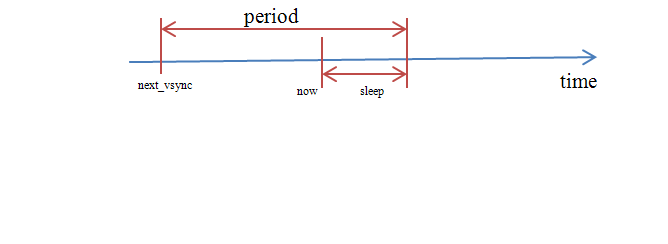
图 11‑33 休眠时间推算简图
这个图的前提是now超时时间不超过一个period。因而公式中还要加上%period。
计算完成sleep后,mNextFakeVSync= next_vsync +period。这是因为mNextFakeVSync代表的是下一次threadLoop需要用到的时间点,而next_vsync是指下一次(最近一次)产生VSync的时间点。
如何在指定的时间点再产生信号呢?有两种方法,其一是采用定时器回调,其二就是采用休眠的形式主动等待,这里使用的是后一种。
可想而知这里的时间要尽可能精准,单位是nanosecond,即纳秒级。函数clock_nanosleep的第一个入参是CLOCK_MONOTONIC,这种时钟更加稳定,且不受系统时间的影响。
当休眠时间到了后,表示产生信号的时刻到了。根据前面的分析,就是通过mEventHandler.onVSyncReceived()回调来通知对消息感兴趣的人,这个做法软硬件都一样。
一次信号产生完成后,函数直接返回true,似乎没有看到循环的地方?这是因为当threadLoop返回值为“真”时,它将被系统再一次调用,从而循环起来。不清楚的可以参阅一下Thread类的实现。
接下来看下DisplayHardware如何处理这个VSync信号的。
中间过程很简单,我们就不一一解释。在DisplayHardware::onVSyncReceived中,它又再次调用内部mVSyncHandler的onVSyncReceived(),将消息向上一层传递。这个变量由EventThread在onFirstRef时通过DisplayHardware::setVSyncHandler()设置,代表的是EventThread对象本身,如下:
void EventThread::onFirstRef() {
mHw.setVSyncHandler(this);//this指针代表EventThread对象
所以VSync信号被进一步递交到了EventThread中。显然,它也不是终点。
void EventThread::onVSyncReceived(int, nsecs_t timestamp) {
Mutex::Autolock _l(mLock);
mVSyncTimestamp =timestamp;
mCondition.broadcast();//有人在等待事件的到来
}
等待VSync事件的地方很多,其中最重要的是EventThread::threadLoop(),这个函数将负责对VSync进行分发,决定谁有权利来最终处理这一事件。
这个函数的主体逻辑还是比较简单的,不过因为很长,内部又夹杂着多个循环体,显得不好理解,因此我们只摘选最重要的一部分来加快大家的阅读。
bool EventThread::threadLoop() {
nsecs_t timestamp;
DisplayEventReceiver::Event vsync;
Vector<wp<EventThread::Connection> > displayEventConnections;
do {//Step1. 第一个循环体
Mutex::Autolock_l(mLock);
do {…//Step2. 第二个循环体,决定是否上报VSync
} while(true);
//跳出循环,接下来就要准备分发VSync了
mDeliveredEvents++;
mLastVSyncTimestamp =timestamp;
const size_t count =mDisplayEventConnections.size();
for (size_t i=0 ;i<count ; i++) {
…//Step3. 第三个循环中逐个判断各connection是否需要上报
if (reportVsync) {
displayEventConnections.add(connection);
}
}
} while(!displayEventConnections.size());//只要size不等于0就可以退出循环了
// 终于开始分发了。。。
vsync.header.type =DisplayEventReceiver::DISPLAY_EVENT_VSYNC;
vsync.header.timestamp =timestamp;
vsync.vsync.count =mDeliveredEvents;
const size_t count =displayEventConnections.size();
for (size_t i=0 ;i<count ; i++) {//Step4. 第四个循环体,分发事件
sp<Connection>conn(displayEventConnections[i].promote());
if (conn != NULL) {
status_t err =conn->postEvent(vsync);//通知connection发起者
if (err == -EAGAIN|| err == -EWOULDBLOCK) {
//这两个错误是指对方当前不接受事件,有可能是暂时性的
} else if (err< 0) {
//发生了致命错误,一律移除
removeDisplayEventConnection(displayEventConnections[i]);
}
} else {//connection已经死了,将它移除
removeDisplayEventConnection(displayEventConnections[i]);
}
}
…
return true;
}
一共有四个循环体,看起来很乱,我们先以伪代码的形式来重新表述一遍:
|
do {//第一个循环体 do { //第二个循环体,判断当前系统是否允许上报VSync } while(true); for (size_t i=0 ; i<count ; i++) { //第三个循环体,逐个计算需要上报的connection个数 } } while (!displayEventConnections.size());/*一旦需要上报的连接数超过0, 就可以退出循环了*/ for (size_t i=0 ; i<count ; i++) { /*第四个循环,开始实际的分发。这时要先考虑connection是否死亡,然后就是判断分发后是否有异常返回,比如EWOULDBLOCK等等。对于暂态的错误,理论上是要再重发的,不过当前系统还没有这么做。的确,一方面这将使程序逻辑变得复杂,另一方面,即便丢一两个VSYNC,也无伤大局。所以从源代码注释来看,将来这部分也不会改善。*/ }
|
相信大家结合这段伪代码再来对照源码,就比较清楚了。
对VSYNC信号感兴趣的人,可以通过registerDisplayEventConnection()来与EventThread建立一个连接。搜索代码可以发现,当前系统中建立了连接的对象是MessageQueue,具体代码在MessageQueue::setEventThread()中。
我们以下图来总结本小节的内容:
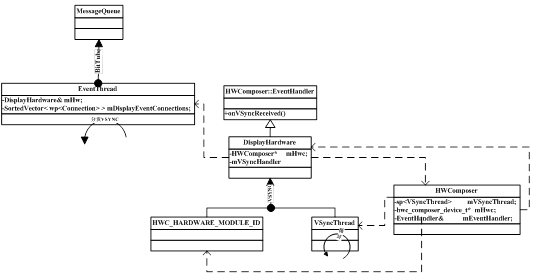
图 11‑34 VSYNC信号的产生与分发
整体逻辑关系相对复杂,建议大家在做源码分析时,以下面两条线索进行:
l VSync信号的传递流向
l 各个类的静态依赖关系。比如DisplayHardware持有一个HWComposer对象,同时这个对象的mEventHandler成员变量又指向DisplayHardware
1.1.1 VSync信号的处理
经过上一小节的分析,现在我们已经明白了系统是如何通过硬件设备或者软件模拟来产生VSync信号的,也明白了它的流转过程。VSync最终会被EventThread::threadLoop()分发给各监听者,在当前版本中是MessageQueue。
MessageQueue通过与EventThread建立一个Connection来监听事件,简图如下:
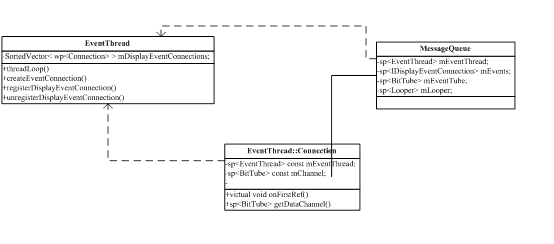
图 11‑35 Connection代表了EventThread和对事件感兴趣的对象的连接
对VSYNC等事件感兴趣的对象,比如MessageQueue,首先要通过EventThread::createEventConnection()来建立一个连接,实际上就是生成了一个EventThread::Connection对象。这个对象将对双方产生如下影响:
l 当Connection::onFirstRef()时,它会主动调用EventThread::registerDisplayEventConnection()来把自己加入到mDisplayEventConnections中,这是保证事件发生后EventThread能找到“连接”的关键一步
l 当MessageQueue得到Connection后,它会马上调用getDataChannel来获得一个BitTube。从逻辑关系上看,Connection只是双方业务上连接,而BitTube则是数据传输通道,各种Event信息就是通过这里传输的
void MessageQueue::setEventThread(const sp<EventThread>&eventThread)
{
mEventThread =eventThread;
mEvents = eventThread->createEventConnection(); //建立一个Connection
mEventTube = mEvents->getDataChannel();//马上获取BitTube
mLooper->addFd(mEventTube->getFd(), 0,ALOOPER_EVENT_INPUT, MessageQueue::cb_eventReceiver, this);
}
从扮演的角色上来看,EventThread是Server,不断地往Tube中写入数据;而MessageQueue是Client,负责读取数据。可能有人会很好奇,MessageQueue如何得知有Event到来,然后去读取它呢?答案就是它们之间的数据读写模式采用的是Socket(AF_UNIX域)。
上面这个函数的末尾,通过Looper添加了一个fd,这实际上就是Socket pair中的一端。然后Looper将这个fd与其callback函数(即MessageQueue::cb_eventReceiver)加入全局的mRequests进行管理。
KeyedVector<int, Request> mRequests;
这个Vector会集中所有需要监测的fd,这样当Looper进行pollInner时,只要有事件需要处理,它就可以通过回调函数通知“接收者”。这里面的实现细节主要包括BitTube.cpp和Looper.cpp,有兴趣的读者可以自行研究下。
当Event发生后,MessageQueue::cb_eventReceiver开始执行,进而调用eventReceiver。如果event的类型是DisplayEventReceiver::DISPLAY_EVENT_VSYNC,这是我们想要监听的事件,所以再调用mHandler->signalRefresh():
void MessageQueue::Handler::signalRefresh() {
if((android_atomic_or(eventMaskRefresh, &mEventMask) & eventMaskRefresh)== 0) {
mQueue.mLooper->sendMessage(this, Message(MessageQueue::REFRESH));
}
}
根据前几个小节我们分析的SurfaceThread工作模式,这个Message会进入它的消息处理队列,然后在SurfaceFlinger::onMessageReceived()中得到处理:
void SurfaceFlinger::onMessageReceived(int32_t what)
{…
switch (what) {
caseMessageQueue::REFRESH: {
const uint32_tmask = eTransactionNeeded | eTraversalNeeded;
uint32_ttransactionFlags = peekTransactionFlags(mask);
if(CC_UNLIKELY(transactionFlags)) {
handleTransaction(transactionFlags);
}
handlePageFlip();
handleRefresh();
constDisplayHardware& hw(graphicPlane(0).displayHardware());
…
if(CC_LIKELY(hw.canDraw())) {
handleRepaint();
hw.compositionComplete();
postFramebuffer();
} else {
hw.compositionComplete();
}
} break;
}
}
经过几个版本的变迁,现在SurfaceFlinger只处理REFRESH一个消息,不过源码中遗留下了很多没用的代码J,大家注意辨别。我们将重点的部分通过高显帮大家划出来,即下面几个函数:
l handleTransaction
即处理事务,什么样的事务呢?在SurfaceFlinger::setTransactionState()中我们可以看到,假如当前的orientation和新的不符合时,会将eTransactionNeeded置位;当应用程序请求createSurface、removeSurface,或者addLayer、removeLayer时也会把它置位。另一个flag被置位的情况则包括:layer的size、alpha、matrix、transparentregion、visibility变化等等。
总结起来,就是当与系统显示相关的状态(比如新增/减少了Surface,显示屏的变化等等)改变,或者某个Layer自身状态(比如它的大小尺寸、可见性、透明度等等)改变时,就需要执行Transaction。
l handlePageFlip
由前面的分析我们知道,每个Layer对应着最多32个BufferSlot,这样系统在进行一次刷新时,必须先决定使用哪个buffer,并利用这一缓冲区更新纹理。另外,我们还需要计算所有图层的可见区域和“脏区域”,以便最终的合成显示。
l handleRefresh
版本更新遗留下的函数,当前实现中没有起到作用,相信在后续升级中会进一步完善。
l handleWorkList
创建HWComposer中的mList,这个列表将用于后续的layer合成。这个函数比较简单,我们不单独介绍。
l handleRepaint
计算出最终的脏区域,并执行实际的合成工作(composeSurfaces),我们将做详细源码分析。
l postFramebuffer
将上一步中生成的缓冲区数据post到framebuffer中,这样才能真正在物理屏幕上显示出来。分为两条路径,即HWComposer::commit和直接调用eglSwapBuffers()
这些函数基本涵盖了SurfaceFlinger的所有功能,接下来的几个小节我们将详细分析它们,各个击破。
1.1.1 handleTransaction
有两个相似的函数,handleTransaction需要获取mStateLock锁,执行handleTransactionLocked,最后再将mHwWorkListDirty置为true。
后一个handleTransactionLocked才是真正处理业务的地方。从前面我们对transactionflags的解释来推断,它的具体工作应该会分为两部分,即traversal(对应eTraversalNeeded)和transaction(对应eTransactionNeeded)。
void SurfaceFlinger::handleTransactionLocked(uint32_ttransactionFlags)
{
const LayerVector¤tLayers(mCurrentState.layersSortedByZ);
const size_t count =currentLayers.size();
/*第一部分,traversal所有layer*/
const boollayersNeedTransaction = transactionFlags & eTraversalNeeded;
if (layersNeedTransaction){//是否需要traversal
for (size_t i=0 ; i<count ; i++) {//逐个layer来处理
constsp<LayerBase>& layer = currentLayers[i];
uint32_t trFlags = layer->getTransactionFlags(eTransactionNeeded);/*这个layer是否
需要doTransaction*/
if (!trFlags)continue;//如果不需要的话,直接进入下一个
const uint32_tflags = layer->doTransaction(0);//由各layer做内部处理,下面会做详细分析
if (flags &Layer::eVisibleRegion)//各layer计算可见区域是否变化
mVisibleRegionsDirty = true;//可见区域发生变化
}
}
/*第二部分,SurfaceFlinger执行transaction*/
if (transactionFlags &eTransactionNeeded) {
if (mCurrentState.orientation != mDrawingState.orientation) {
/*角度产生变化,需要重新计算所有的可见区域,并且重绘*/
const int dpy = 0;//第一个Display
const intorientation = mCurrentState.orientation; //新的orientation
GraphicPlane&plane(graphicPlane(dpy));
plane.setOrientation(orientation);//将改变后的旋转角度设置到底层管理者
// update theshared control block
constDisplayHardware& hw(plane.displayHardware());
/*下面的dcblk是一个供应用程序查询当前显示属性的“服务机构”,因而需要同步更新它*/
volatiledisplay_cblk_t* dcblk = mServerCblk->displays + dpy;
dcblk->orientation = orientation;
dcblk->w =plane.getWidth();
dcblk->h =plane.getHeight();
mVisibleRegionsDirty= true; //旋转角度变化,当然可见区域也会变化
mDirtyRegion.set(hw.bounds());//整个屏幕区域都是“脏”的
}
if (currentLayers.size() > mDrawingState.layersSortedByZ.size()) {// 有新的layer增加
mVisibleRegionsDirty = true;//可见区域需要重新计算
}
if (mLayersRemoved) {/*也可能有layers已经被移除,这样可见区域也会有变化。
比如原本被遮盖的部分或许就暴露出来了*/
mLayersRemoved =false; //
mVisibleRegionsDirty = true;
constLayerVector& previousLayers(mDrawingState.layersSortedByZ);
const size_t count= previousLayers.size();
for (size_t i=0 ;i<count ; i++) {
constsp<LayerBase>& layer(previousLayers[i]);
if(currentLayers.indexOf( layer ) < 0) {/*在之前状态中存在,在现有状态中找不到,
说明它被removed了*/
mDirtyRegionRemovedLayer.orSelf(layer->visibleRegionScreen);/*被移除layer的可见
区域*/
}
}
}
}
commitTransaction();//和Layer::doTransaction()的做法基本一样,多了几步操作
}
和我们预料的一样,整个函数分别处理eTraversalNeeded和eTransactionNeeded两种情况。注意layersNeedTransaction这个变量其实应该叫layersNeedTraversal更贴切一点,而后面eTransactionNeeded的情况下则没有另外声明bool变量来做判断。之所以叫做eTraversalNeeded,应该是因为这部分的源码是要遍历所有layer来实现的。不过遍历的过程中调用的各layer内部函数又叫做doTransaction()。后一个eTransactionNeeded有点类似于做整体处理,所以整个handleTransactionLocked的函数逻辑就是“分(遍历各layer)à总(SurfaceFlinger来做综合处理)”。名字有点混乱,大家稍微整理一下。
(1) eTraversalNeeded
先来看eTraversalNeeded的处理。SurfaceFlinger中记录当前系统中layers状态的有两个全局变量,分别是:
State mDrawingState;
State mCurrentState;
前者是上一次“drawing”时的状态,而后者则是当前状态。这样我们只要通过对比这两个State,就知道系统中发生了什么变化,然后采取相应的措施。它们内部都包含了一个LayerVector类型的layersSortedByZ成员变量,从变量名可以看出是所有layers按照Z-order顺序排列的Vector。
所以我们可以从mCurrentState.layersSortedByZ来访问到所有layer,然后对有需要执行transaction的图层再调用内部的doTransaction()。显然,并不是每个layer在每次handleTransactionLocked中都需要调用doTransaction,判断的标准就是LayerBase::getTransactionFlags返回的标志中是否要求了eTransactionNeeded。大家要注意SurfaceFlinger和各Layer都有一个mTransactionFlags变量,不过含义不同。另外,Layer中也同样有mCurrentState和mDrawingState,虽然它们也分别表示上一次和当前的状态,但所属的State结构体是完全不同的。特对比如下:

图 11‑36 两个State结构体对比
为了理解Layer究竟在doTransaction中做了些什么,我们先插入分析下它的实现:
uint32_t Layer::doTransaction(uint32_tflags)
{…
const Layer::State&front(drawingState());/*mDrawingState */
const Layer::State&temp(currentState());/*mCurrentState */
const bool sizeChanged =(temp.requested.w != front.requested.w) || (temp.requested.h !=front.requested.h);
if (sizeChanged) {
…
mSurfaceTexture->setDefaultBufferSize(temp.requested.w, temp.requested.h);
}
…
return LayerBase::doTransaction(flags);
}
首先判断图层的尺寸是否发生了改变(sizeChanged变量),即当前状态(temp)中的宽/高与上一次状态(front)一致与否。假如size发生了变化,我们调用mSurfaceTexture->setDefaultBufferSize()来使它生效。其中mSurfaceTexture是在Layer::onFirstRef()时生成的SurfaceTexture对象;SurfaceTexture内部又包含了一个BufferQueue成员变量(mBufferQueue),所以SurfaceTexture就是BufferQueue的管理封装类。这些知识我们在前几个小节已经详细分析过了,不清楚的可以回头看下。
BufferQueue::setDefaultBufferSize()改变的是内部的mDefaultWidth和mDefaultHeight两个默认的宽高值。当我们调用requestBuffers()请求Buffer时,如果没有指定width和height(值为0),BufferQueue就会使用这两个默认配置。
最后函数调用其父类LayerBase的doTransaction(),这才是整个实现的核心,我们来看下:
uint32_t LayerBase::doTransaction(uint32_t flags)
{
const Layer::State&front(drawingState());//和前面函数是一样的
const Layer::State&temp(currentState());
…
if (temp.sequence != front.sequence) {
flags |= eVisibleRegion;
this->contentDirty = true;
const uint8_t type =temp.transform.getType();
mNeedsFiltering =(!temp.transform.preserveRects() || (type >= Transform::SCALE));
}
commitTransaction();
return flags;
}
这个函数也不长,主要难点就是理解sequence。这个变量是一个int值,当Layer的position、z-order、alpha、matrix、transparent region、flags、crop等一系列属性发生变化时(这些属性的设置函数都以setXXX开头,比如setCrop、setFlags),mCurrentState.sequence就会自增。因而当doTransaction时,它和mDrawing.sequence的值就不一样了。相比于每次属性变化时都马上做处理,这样的设计是合理的。因为它在平时只收集属性的变化,而到了特定的时刻(VSYNC信号产生时)才做统一处理。一方面这节约了系统资源;另一方面,部分属性的频繁变化会给整个画面带来不稳定感,采用这种方式就能规避这些问题。
仔细观察Layer和LayerBase的这两个doTransaction()实现,我们可以大致得出它们的目的,就是通过分析当前与上一次的状态变化,来制定下一步的操作——比如是否要重新计算可见区域(eVisibleRegion)、是否需要重绘(contentDirty)等等。
这些操作有的是要由SurfaceFlinger统一部署的,因而通过flags返回给调用者,比如eVisibleRegion;有些属于Layer的“家务”,因而只要内部做标记就可以了。
最后,commitTransaction()把mCurrentState赋给mDrawingState,这样它们两个的状态就一样了。在下一轮doTransaction()前,mCurrentState又会跟着属性的变更而改变,如此循环往复。
这样Layer::doTransaction()函数就结束了,带着flags值返回到前面的SurfaceFlinger::handleTransactionLocked()中。一旦某个layer明确表明可见区域发生了改变(eVisibleRegion),SurfaceFlinger中将其mVisibleRegionsDirty设为true,这个标志将影响后面的操作。
(2) eTransactionNeeded
完成当前系统中所有layer的遍历后,SurfaceFlinger就进入自己的“内务”处理了,即handleTransactionLocked()源码中的第二部分。我们在代码中列出了它需要完成的工作,也就是:
l orientation
当显示屏旋转方向发生改变时,我们要把这一消息告知底层的管理者,即前几个小节讲过的GraphicPlane。变量dpy表示Display的编号,默认下都使用0。
接下来还需要同步更新的是mServerCblk中的信息,它是提供给各应用程序查询当前显示属性的,包括宽、高、格式、旋转角度、fps、密度等一系列数据。
显示屏旋转角度变化影响的范围是整个区域,所以在计算mDirtyRegion时,就直接设为整个屏幕(hw.bounds())
l 新增layer
与上一次相比,系统可能有新增的layer,我们只要对比两个State中的layer队列数目是否一致就可以得出结论了。假如图层有新增的话,可见区域需要重新计算,我们将mVisibleRegionsDirty置为true
l 移除layer
和上面的情况类似,有些layer也可能被移除了。针对这种情况,我们也需要重新计算可见区域。怎么知道哪些layer被移除了呢?有一个简单的办法就是比较两个State中的layersSortedByZ——假如一个layer在上一次的mDrawingState中还有,到了这次mCurrentState找不到了,那么就可以认定它被removed了。我们用mDirtyRegionRemovedLayer来记录这些被剔除图层的可见区域,因为一旦图层被移除,意味着被它遮盖的区域就有可能重新显露出来
在handleTransactionLocked()末尾,它也调用了commitTransaction()来结束整个业务处理。和LayerBase相同的地方是:
mDrawingState = mCurrentState;
这样两个状态就一样了。
另外,SurfaceFlinger还需要通知所有被移除的layer,相应的回调函数是onRemoved()。Layer在得到这一消息后,就知道它已经不会再被SurfaceFlinger处理了。最后,唤醒所有正在等待Transaction结束的线程:
mTransactionCV.broadcast();
SurfaceFlinger:: handleTransaction ()的流程图如下:
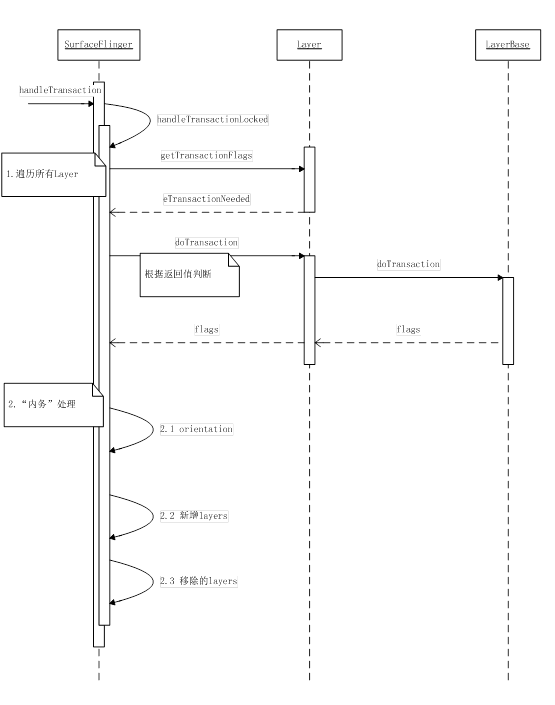
图 11‑37 handleTransaction流程图
1.1.1 handlePageFlip
PageFlip可以理解为“翻页”。从这个意思上来看,它应该与图层缓冲区有关系——因为是多缓冲机制,在适当的时机,我们就需要做“翻页”的动作。
void SurfaceFlinger::handlePageFlip()
{…
const DisplayHardware&hw = graphicPlane(0).displayHardware();//编号为0的Display
const RegionscreenRegion(hw.bounds());//整个屏幕区域
const LayerVector¤tLayers(mDrawingState.layersSortedByZ);/*当前所有layers*/
const bool visibleRegions = lockPageFlip(currentLayers);/*Step1.下面会详细分析这个函数,注意它的返回
值是一个bool类型变量。*/
if (visibleRegions ||mVisibleRegionsDirty) {//可见区域发生变化
RegionopaqueRegion;//不透明区域
computeVisibleRegions(currentLayers, mDirtyRegion, opaqueRegion);/*Step2.计算可见区域*/
/*Step3.重建mVisibleLayersSortedByZ,即所有可见图层的排序*/
const size_t count= currentLayers.size();
mVisibleLayersSortedByZ.clear();//清空
mVisibleLayersSortedByZ.setCapacity(count);//容量
for (size_t i=0 ;i<count ; i++) {
if(!currentLayers[i]->visibleRegionScreen.isEmpty())//当前图层有可见区域
mVisibleLayersSortedByZ.add(currentLayers[i]);
}
mWormholeRegion = screenRegion.subtract(opaqueRegion);/*Step4.虫洞计算*/
mVisibleRegionsDirty = false;
invalidateHwcGeometry();
}
unlockPageFlip(currentLayers);/*Step5.与lockPageFlip相对应 */
…
mDirtyRegion.andSelf(screenRegion);//排除屏幕范围之外的区域
}
Step1@SurfaceFlinger::handlePageFlip,通过lockPageFlip分别锁定各layer当前要处理的缓冲区。SurfaceFlinger::lockPageFlip逻辑比较简单,我们直接来看下Layer::lockPageFlip:
void Layer::lockPageFlip(bool& recomputeVisibleRegions)
{…
if (mQueuedFrames > 0) {…
if(android_atomic_dec(&mQueuedFrames) > 1) {
mFlinger->signalLayerUpdate();
}
…
Rejectr(mDrawingState, currentState(), recomputeVisibleRegions);
if (mSurfaceTexture->updateTexImage(&r) < NO_ERROR) {//加载新的纹理
recomputeVisibleRegions = true;
return;
}
mActiveBuffer = mSurfaceTexture->getCurrentBuffer();//当前活跃的缓冲区
…//其它内部变量更新
glTexParameterx(GL_TEXTURE_EXTERNAL_OES,GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE);//配置参数
glTexParameterx(GL_TEXTURE_EXTERNAL_OES,GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE);
}
}
SurfaceTexture设置了一个FrameQueuedListener,当BufferQueue中的一个BufferSlot被queued后,它首先通知这个Listener,进而调用所属Layer的onFrameQueued。这个函数会增加mQueuedFrames的计数,并且向SurfaceFlinger发出一个invalidate信号(signalLayerUpdate)。
因而如果当前没有任何queuedbuffer的话,lockPageFlip()什么都不用做。假如当前有多个mQueuedFrames的话,除了正常处理外,我们还需要另外调用signalLayerUpdate来发出一个新的event。
Layer中持有一个SurfaceTexture对象(成员变量mSurfaceTexture),用于管理BufferQueue(成员变量mBufferQueue)。一旦SurfaceFlinger需要对某个buffer进行操作时,根据前几个小节对BufferQueue状态迁移的分析,我们知道它首先要accquire它,这个动作被封装在SurfaceTexture::updateTexImage中。除此之外,这个函数还需要根据Buffer中的内容来更新Texture,稍后我们做详细分析。
在lockPageFlip内部,定义了一个Reject结构体,并做为函数参数传递给updateTexImage。后者在acquire到buffer后,调用Reject::reject()来判断这个缓冲区是否符合要求。如果updateTexImage成功的话,Layer就可以更新mActiveBuffer,也就是当前活跃的缓冲区(每个layer对应32个BufferSlot);以及其它一系列相关内部成员变量,比如mCurrentCrop、mCurrentTransform等等,这部分源码省略。
纹理贴图还涉及到很多细节的配置,比如说纹理图像与目标的尺寸大小有可能不一致,这种情况下怎么处理?或者当纹理坐标超过[0.0,1.0]范围时,应该怎么解决。这些具体的处理方式都可以通过调用glTexParameterx(GLenumtarget, GLenum pname, GLfixed param)来配置。函数的第二个参数是需要配置的对象类型(比如GL_TEXTURE_WRAP_S和GL_TEXTURE_WRAP_T分别代表两个坐标维);第三个就是具体的配置。
status_t SurfaceTexture::updateTexImage(BufferRejecter* rejecter) {…
Mutex::Autolocklock(mMutex);
status_t err = NO_ERROR;
…
EGLDisplay dpy =eglGetCurrentDisplay();//当前Display
EGLContext ctx =eglGetCurrentContext();//当前环境Context
…
BufferQueue::BufferItemitem;
err = mBufferQueue->acquireBuffer(&item);//acquire当前需要处理的buffer,封装在item中
if (err == NO_ERROR) {//acquire成功
int buf = item.mBuf; //此Buffer在Slot中的序号
if(item.mGraphicBuffer != NULL) {…
mEGLSlots[buf].mGraphicBuffer = item.mGraphicBuffer;//后面会用到
}
…
EGLImageKHR image =mEGLSlots[buf].mEglImage;
if (image ==EGL_NO_IMAGE_KHR) {/*假如image不为空的话,前面会先把它destroy掉,代码
省略*/
if(mEGLSlots[buf].mGraphicBuffer == NULL) {
…//异常处理
} else {
image = createImage(dpy, mEGLSlots[buf].mGraphicBuffer);//生成一个纹理图像
mEGLSlots[buf].mEglImage = image;
…
}
}
if (err == NO_ERROR) {…
glBindTexture(mTexTarget, mTexName);
glEGLImageTargetTexture2DOES(mTexTarget, (GLeglImageOES)image);
…
}
if (err != NO_ERROR) {//将acquired的buffer释放
mBufferQueue->releaseBuffer(buf, dpy, mEGLSlots[buf].mFence);
mEGLSlots[buf].mFence = EGL_NO_SYNC_KHR;
return err;
}
…
/*最后更新SurfaceTexture中各状态*/
mCurrentTexture = buf;
mCurrentTextureBuf =mEGLSlots[buf].mGraphicBuffer;
…
} else {…
}
return err;
}
这个函数比较长,我们只留下了最核心的部分。它的目标是更新Layer的纹理(Texture),分为如下几步:
①Acquire一个需要处理的Buffer。根据前面对Buffer状态迁移的分析,当消费者想处理一块buffer时,它首先要向BufferQueue做acquire申请。那么BufferQueue怎么知道当前要处理哪一个Buffer呢?这是因为其内部维护有一个Fifo先入先出队列。一旦有buffer被enqueue后,就会压入队尾;每次acquire就从队头取最前面的元素进行处理,完成之后就将其从队列移除
②Acquire到的buffer封装在BufferItem中,item.mBuf代表它在BufferSlot中的序号。正常情况下item.mGraphicBuffer都不为空,我们将它记录到mEGLSlots[buf].mGraphicBuffer中,以便后续操作。假如mEGLSlots[buf].mEglImage当前不为空(EGL_NO_IMAGE_KHR)的话,需要先把旧的image销毁(eglDestroyImageKHR)
③SurfaceFlinger有权决定SurfaceTexture得到的Buffer是否有效合法(比如说size是否正确),这是通过updateTexImage(BufferRejecter* rejecter)中的rejecter对象来完成的。BufferRejecter实现了一个reject接口,用于SurfaceTexture调用来验证前面acquire到的buffer是否符合要求
④接下来就生成Texture了。需要分别调用glBindTexture和 glEGLImageTargetTexture2DOES。后一个函数是opengl es中对glTexImage2D的扩展,因为在嵌入式环境下如果直接采用这个API的话,当图片很大时会严重影响到速度,而经过扩展后的glEGLImageTargetTexture2DOES可以解决这个问题。这个接口是和eglCreateImageKHR配套使用的,封装在前面createImage中。不了解这些函数用法的读者请务必参考opengles技术文档
⑤消费者一旦处理完Buffer后,就可以将其release了。此后这个buffer就又恢复FREE状态,以供生产者再次dequeue使用
⑥最后,我们需要更新SurfaceTexture中的各成员变量,包括mCurrentTexture、mCurrentTextureBuf、mCurrentCrop等等
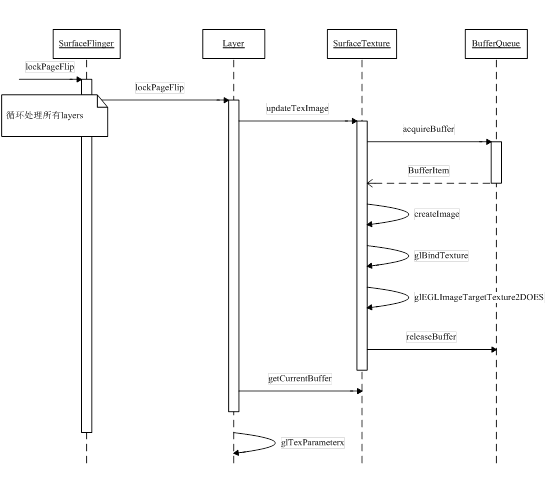
图 11‑38 lockPageFlip流程图
Step2@SurfaceFlinger::handlePageFlip,计算所有layer的可见区域。在分析源码前,我们自己先来想一下,图层中什么样的区域是可见的呢?
l Z-order
各layer的z-order无疑是第一考虑的要素。因为排在越前面的图层,其获得曝光的机率越大,可见的区域也可能越大,如下图所示:
|
|
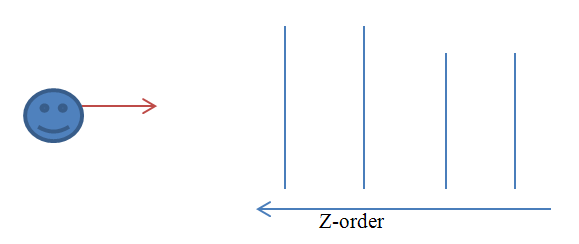
图 11‑39 后面的图层有可能被遮挡而不可见
所以在计算可见性时,是按照Z-order由上而下进行的。假如一个layer的某个区域被确定为可见,那么与之相对应的它下面的所有图层区域都会被遮盖而不可见
l 透明度
虽然越前面的layer优先级越高,但这并不代表后面的图层完全没有机会。只要前一个layer不是完全不透明的,那么从理论上来讲用户就应该能“透过”这部分区域看到后面的内容
l 图层大小
与透明度一样,图层大小也直接影响到其可见区域。因为每个layer都是有大有小的,即便前一个layer是完全不透明的,但只要它的尺寸没有达到“满屏”,那么比它z-order小的图层还是有机会暴露出来的。这也是我们需要考虑的因素之一
综合上面的这几点分析,我们能大概制定出计算layer可见区域的逻辑步骤:
Ø 按照Z-order逐个计算各layer的可见区域,结果记录在LayerBase::visibleRegionScreen中
Ø 对于Z-order值最大的layer,显然没有其它图层会遮盖它。所以它的可见区域(visibleRegion)应该是(当然,前提是这个layer没有超过屏幕区域)自身的大小再减去完全透明的部分(transparentRegionScreen),由此计算出来的结果我们把它称为aboveCoveredLayers。这个变量应该是全局的,因为它需要被传递到后面的layers中,然后不断地累积运算,直到覆盖整个屏幕区域
图 11‑40 Z-order最大的layer可见区域示意图
如上图所示,外围加深部分是这个图层的尺寸大小,中间挖空区域则是完全透明的,因而需要被剔除。半透明区域比较特殊,它既属于上一个图层的可见区域,又不被列为遮盖区域
Ø 对于Z-order不是最大的layer,它首先要计算自身所占区域扣除aboveCoveredLayers后所剩的空间。然后才能像上一步一样再去掉完全透明的区域,这样得到的结果就是它最终的可见区域
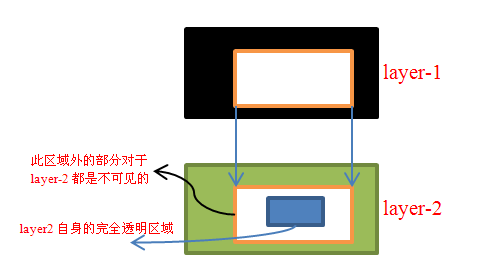
图 11‑41 其它layer的可见区域
接下来看源码实现:
void SurfaceFlinger::computeVisibleRegions(const LayerVector¤tLayers,
Region& dirtyRegion, Region& opaqueRegion)
{…
const GraphicPlane&plane(graphicPlane(0));
const Transform&planeTransform(plane.transform());
const DisplayHardware&hw(plane.displayHardware());
const RegionscreenRegion(hw.bounds());//整个屏幕区域
Region aboveOpaqueLayers;
Region aboveCoveredLayers;//全局的,用于描述当前已经被覆盖的区域
Region dirty;
bool secureFrameBuffer =false;
size_t i =currentLayers.size();//所有layer数量
while (i--) {/Step1. 注意计算的方向,按照Z-order由大到小的顺序
constsp<LayerBase>& layer = currentLayers[i];//取得这一layer
layer->validateVisibility(planeTransform);//验证当前layer的可见性,大家可以自行分析
constLayer::State& s(layer->drawingState());//layer的状态
Region opaqueRegion;//完全不透明的区域
Region visibleRegion;//可见区域
Region coveredRegion;//被遮盖的区域。以上三个变量都是局部的,用于描述各个layer
if(CC_LIKELY(!(s.flags & ISurfaceComposer::eLayerHidden) && s.alpha)){
/*Step2. 这部分计算可见区域visibleRegion和完全不透明区域opaqueRegion*/
const booltranslucent = !layer->isOpaque(); //layer可见,又不是完全不透明,那就是半透明
const Rectbounds(layer->visibleBounds());
visibleRegion.set(bounds);//可见区域的初始值
visibleRegion.andSelf(screenRegion);//和屏幕大小先进行与运算
if(!visibleRegion.isEmpty()) {//如果经过上述运算,可见区域还不为空的话
if(translucent) { //将完全透明区域从可见区域中移除
visibleRegion.subtractSelf(layer->transparentRegionScreen);
}
const int32_tlayerOrientation = layer->getOrientation();//旋转角度
if(s.alpha==255 && !translucent &&
((layerOrientation & Transform::ROT_INVALID) == false)) {
// theopaque region is the layer's footprint
opaqueRegion = visibleRegion;//完全一致
}
}
}
/*Step3. 考虑被上层layer覆盖区域*/
coveredRegion = aboveCoveredLayers.intersect(visibleRegion);//计算会被遮盖的区域
aboveCoveredLayers.orSelf(visibleRegion);//累加计算,然后传给后面的layer
visibleRegion.subtractSelf(aboveOpaqueLayers);//扣除被遮盖的区域
/*Step4. 计算“脏”区域*/
if(layer->contentDirty) {//当前layer有脏内容
dirty =visibleRegion;//不光要包括本次的可见区域
dirty.orSelf(layer->visibleRegionScreen);//还应考虑上一次没处理的可见区域
layer->contentDirty = false;//处理完成
} else {//当前layer没有脏内容
const RegionnewExposed = visibleRegion - coveredRegion;
const RegionoldVisibleRegion = layer->visibleRegionScreen;
const RegionoldCoveredRegion = layer->coveredRegionScreen;
const RegionoldExposed = oldVisibleRegion - oldCoveredRegion;
dirty =(visibleRegion&oldCoveredRegion) | (newExposed-oldExposed);
}
/*Step5. 更新各变量*/
dirty.subtractSelf(aboveOpaqueLayers);//扣除不透明区域
dirtyRegion.orSelf(dirty);//累积计算脏区域
aboveOpaqueLayers.orSelf(opaqueRegion);//累积不透明区域
layer->setVisibleRegion(visibleRegion);//设置layer内部的可见区域
layer->setCoveredRegion(coveredRegion);//设置layer内部的被遮盖区域
/*Step6. 屏幕截图保护*/
if(layer->isSecure() && !visibleRegion.isEmpty()) {
secureFrameBuffer= true;
}
}//while循环结束
/*Step7. 考虑被移除layer占据的区域*/
dirtyRegion.orSelf(mDirtyRegionRemovedLayer);
mDirtyRegionRemovedLayer.clear();
mSecureFrameBuffer =secureFrameBuffer;
opaqueRegion =aboveOpaqueLayers;
}
Step1@ SurfaceFlinger::computeVisibleRegions,循环处理每个layer。注意计算方向(i--)采取Z-order由大而小的顺序,这和我们之前的分析是一致的。这个函数中定义了很多变量,包括对各layer全局的aboveOpaqueLayers、aboveCoveredLayers、dirty,以及局部的opaqueRegion、visibleRegion、coveredRegion,但基本逻辑还是和我们前面的推测相符合的。
Step2@ SurfaceFlinger::computeVisibleRegions,计算visibleRegion和opaqueRegion。不过有两个情况下不需要这么做。其一就是当前layer被隐藏了,这可以从s.flags & ISurfaceComposer::eLayerHidden中获得;其二就是它的alpha值为0,也就是说当前layer是完全透明的。
如果不是这两种情况的话,就可以继续计算visibleRegion。它的初始值是layer->visibleBounds(),相当于前面我们说的该layer所占据的区域。这一初始值与屏幕区域进行与运算,排除屏幕显示区域外的部分。此时如果visibleRegion还有剩余空间的话,就继续减掉透明区域。
变量opaqueRegion在某些情况下和visibleRegion是一样的。即当前图层完全不透明(alpha==255&&!translucent)且旋转角度值为ROT_INVALID时,两者可认为是同一个区域。
Step3@ SurfaceFlinger::computeVisibleRegions,考虑被上层layer遮盖的情况。其中coveredRegion计算得到会被遮盖的区域,即visibleRegion需要剔除的部分。并且累加更新全局的aboveCoveredLayers,以便后面的layer可以继续使用。
Step4@ SurfaceFlinger::computeVisibleRegions,在前面的基础上进一步计算dirty区域,也就是需要渲染的部分。涉及到两个变量,dirty是一个全部变量,它表示每个layer中的脏区域;而dirtyRegion是函数的出参,属于全局性的,用于计算所有layer脏区域的集合(采用“或”运算)。可能有人会问,需要渲染的区域不就是可见区域吗?这可不一定。比如说当前界面内容没有任何改变,那么为什么还要浪费时间再重新渲染一次呢?
如果有“脏”内容(layer->contentDirty为true),dirty要同时覆盖当前可见区域(visibleRegion),以及上次还未考虑的可见区域(layer->visibleRegionScreen)。
如果没有“脏”内容,那么我们只要渲染这次新“暴露”出来的区域就可以了。因为上一次暴露出来的区域已经被渲染过了,而且内部又没有变化,当然不需要再次渲染。
Step5@ SurfaceFlinger::computeVisibleRegions,更新所有相关变量,包括layer内部的visibleRegionScreen(通过setVisibleRegion)、coveredRegionScreen(通过setCoveredRegion),以及需要累积计算的aboveOpaqueLayers,和dirtyRegion等等。
Step6@ SurfaceFlinger::computeVisibleRegions,判断当前窗口内容是否受保护(变量secureFrameBuffer)。判断的标准就是当前可见区域不为空(!visibleRegion.isEmpty()),且需要安全保护(isSecure()),这将影响到截屏功能是否可以正常执行。
Step7@ SurfaceFlinger::computeVisibleRegions,除了上述的步骤外,我们还要考虑那些被移除的layer所占据的区域,这样得到的才是最终的结果。函数出参opaqueRegion也就是通过各layer计算后的累加值aboveOpaqueLayers。
分析完可见区域的计算后,我们回到本小节的handlePageFlip函数中。
Step3@SurfaceFlinger::handlePageFlip. 通过前面的computeVisibleRegions,现在所有layer的可见区域都已经记录在其内部的visibleRegionScreen中了。接下来 mVisibleLayersSortedByZ用于对所有可见的图层进行z-order排序。
Step4@SurfaceFlinger::handlePageFlip. 在computeVisibleRegions中,opaqueRegion做为所有layer的遮挡区域(对应aboveOpaqueLayers)的累积结果,正常情况下应该是和屏幕大小是一致的。反之,如果它们不一样的话,就产生了wormhole区域:
mWormholeRegion = screenRegion.subtract(opaqueRegion);
这部分区域比较特殊,因而在后续的图层合成时需要做额外处理(具体调用drawWormhole来实现)。
Step5@SurfaceFlinger::handlePageFlip,调用unlockPageFlip做最后的准备工作。实现上和lockPageFlip有相似之处,也是通过循环调用各layer自己的unlockPageFlip来完成。因为图层“脏”区域的坐标空间和屏幕坐标不是同一个,在这里要对其做下坐标变换。
1.1.1 handleRefresh
从名称上看,这个函数处理“刷新”。经过比对新老版本的差异,我们觉得这个地方应该是老版本遗留下来的“废料”。换句话说,它对MessageQueue::REFRESH事件的处理没有起到作用。
void SurfaceFlinger::handleRefresh()
{
bool needInvalidate =false;
const LayerVector¤tLayers(mDrawingState.layersSortedByZ);
const size_t count =currentLayers.size();
for (size_t i=0 ;i<count ; i++) {
constsp<LayerBase>& layer(currentLayers[i]);
if (layer->onPreComposition()) {
needInvalidate =true;
}
}
if (needInvalidate) {
signalLayerUpdate();
}
}
这个函数很简单,首先调用每个layer的onPreComposition,判断是否需要needInvalidate,条件就是Layer:: mQueuedFrames>0。
在函数的最后,它调用signalLayerUpdate:
void SurfaceFlinger::signalLayerUpdate() {
mEventQueue.invalidate();
}
可见它只是直接使用了MessageQueue::invalidate():
void MessageQueue::invalidate() {
mEvents->requestNextVsync();
}
最后的requestNextVsync用于安排下一次的VSYNC事件,这个函数只在vsync rate为0时才有效。也就是说只有当我们关闭了VSYNC的主动上报后才有作用,这和之前的分析是不符合的。因而我们可以忽略handleRefresh,相信在下一个版本中它会得到清理。
1.1.1 handleRepaint
经过handleTransaction和handlePageFlip等步骤的准备工作后,现在可以合成各图层数据了。
void SurfaceFlinger::handleRepaint()
{…
mSwapRegion.orSelf(mDirtyRegion);
const DisplayHardware&hw(graphicPlane(0).displayHardware());
…
uint32_t flags =hw.getFlags();//系统支持的渲染方式
if (flags &DisplayHardware::SWAP_RECTANGLE) {
mDirtyRegion.set(mSwapRegion.bounds());
} else {
if (flags & DisplayHardware::PARTIAL_UPDATES) {
mDirtyRegion.set(mSwapRegion.bounds());
} else {
mDirtyRegion.set(hw.bounds());
mSwapRegion =mDirtyRegion;
}
}
setupHardwareComposer();
composeSurfaces(mDirtyRegion);//合成各图层数据
mSwapRegion.orSelf(mDirtyRegion);
mDirtyRegion.clear();
}
系统支持多种类型的渲染方式,可以从DisplayHardware获取到:
l SWAP_RECTANGLE
我们只需要渲染“脏”区域,或者说系统在软件层面上支持部分区域更新,但更新区域必须是长方形规则的。由于这个限制,mDirtyRegion应该是覆盖所有“脏”区域的最小矩形
l PARTIAL_UPDATES
系统支持硬件层面部分区域更新,同样也需要是矩形区域
l 其它
其它情况下,我们需要重绘整个屏幕,即hw.bounds()
接着setupHardwareComposer()对所有mVisibleLayersSortedByZ中的layers进行数据初始化,比如合成类型(compositionType)。包括HWC_FRAMEBUFFER和HWC_OVERLAY两种。如果是前者的话,那么图层合成将由SurfaceFlinger通过OpenGL ES来完成;否则就由一种叫overlay的硬件来执行。Overlay通常被用于处理视频回放和录制时的预览,这种硬件合成可以加快处理,减小CPU的负担。不过从Android 4.0开始,源码中关于Overlay部分的实现被移除了。
HWComposer内部维持着一个各layer属性的list:
hwc_layer_list_t* mList;
这个结构体定义如下:
typedef struct hwc_layer_list {
uint32_t flags;//各标志
size_tnumHwLayers;//图层数量
hwc_layer_t hwLayers[0];//各图层属性详细描述
} hwc_layer_list_t;
当SurfaceFlinger进行handleWorkList时,它根据当前可见图层的数量调用HWComposer::createWorkList(size_tnumLayers)来创建这一mList。SurfaceFlinger::setupHardwareComposer()中,首先将mList里所有的hwc_layer对象的compositionType都设置为HWC_FRAMEBUFFER,然后调用HWComposer::prepare。这个函数会通过hwc设备(即前面章节中讲过的HWC_HARDWARE_MODULE_ID)提供的prepare接口来为每个layer判断HWC支持的合成类型,大家可以自己挑一个具体的硬件平台来分析prepare细节。另外,它还统计使用不同合成类型的layer的数量,分别由mNumOVLayers (HWC_OVERLAY)和mNumFBLayers (HWC_FRAMEBUFFER)来记录。
图层合成最关键的一步就是composeSurfaces(),我们来详细分析它的实现:
void SurfaceFlinger::composeSurfaces(const Region& dirty)
{
const DisplayHardware&hw(graphicPlane(0).displayHardware());
HWComposer&hwc(hw.getHwComposer());//注意hw,hwc和graphicPlane的关系
hwc_layer_t* constcur(hwc.getLayers());//前面讲到的mList
const size_t fbLayerCount= hwc.getLayerCount(HWC_FRAMEBUFFER);// mNumFBLayers
if (!cur || fbLayerCount){// HWC_FRAMEBUFFER类型数量必须要大于0才处理
if(hwc.getLayerCount(HWC_OVERLAY)) {// HWC_OVERLAY数量大于0的情况
//我们不考虑这种情况
} else {
if(!mWormholeRegion.isEmpty()) {
drawWormhole();//特殊区域需要特别处理
}
}
/*以下开始真正的渲染工作*/
const Vector<sp<LayerBase> >& layers(mVisibleLayersSortedByZ);//所有可见图层
const size_t count =layers.size();
for (size_t i=0 ;i<count ; i++) {
constsp<LayerBase>& layer(layers[i]);
const Regionclip(dirty.intersect(layer->visibleRegionScreen));//判断各个layer是否需要渲染
if(!clip.isEmpty()) {
…
layer->draw(clip);//调用各layer进行绘图
}
}
}
}
在SurfaceFlinger中,显示屏用GraphicPlane表示。它内部的成员数组变量mGraphicPlanes[1]用于存储支持的屏幕,目前只实现了第0号Display。GraphicPlane内部包含了DisplayHardware,用于封装宽、高、格式等一系列帧缓冲区信息;OpenGL的本地窗口FramebufferNativeWindow;EGL相关结构,如配置、Context、Surface;以及HWComposer,即mHwc成员变量。
HWComposer简单来说,它管理一个名称为HWC_HARDWARE_MODULE_ID的设备,比如硬件是否支持产生VSYNC信号就需要由它来判断。大家可以理一下这几个对象的关系。
得到hwc后,进一步获取worklist,也就是我们前面讲过的mList。这时列表中所有的layer属性都已经更新完毕,包括compositionType。而且也分别统计出了HWC_FRAMEBUFFER和HWC_OVERLAY两种类型的layer数量。所以fbLayerCount实际上就是mNumFBLayers。假如这个数小于0,就什么都不做。
这个函数中的“脏”区域是由handleRepaint传下来的,也就是mDirtyRegion。对于每个layer,我们都使用dirty.intersect(layer->visibleRegionScreen)来判断它的可见区域与整个“脏”区域是否有交集。有的话才需要进行渲染,否则就不用多此一举了。
最后,通过各Layer自身的draw()来执行具体的绘图工作。
LayerBase::draw()直接调用了onDraw(),这个接口在LayerBase中虚函数,由它的子类Layer来实现。
void Layer::onDraw(const Region& clip) const
{…
if(CC_UNLIKELY(mActiveBuffer == 0)) {//当前还没有活跃的Buffer,有可能发生
Region under;//此layer下面被遮盖的区域。如果没有的话,就把它“涂黑”
const SurfaceFlinger::LayerVector&drawingLayers(mFlinger->mDrawingState.layersSortedByZ);
const size_t count =drawingLayers.size();
for (size_t i=0 ;i<count ; ++i) {
constsp<LayerBase>& layer(drawingLayers[i]);
if (layer.get() ==static_cast<LayerBase const*>(this))//layer自己
break;
under.orSelf(layer->visibleRegionScreen);
}
Regionholes(clip.subtract(under));//哪些区域不会被遮盖
if (!holes.isEmpty()){
clearWithOpenGL(holes, 0, 0, 0, 1);
}
return;
}
…/*配置opengl 参数,源码省略*/
drawWithOpenGL(clip);
…
}
变量mActiveBuffer在前面lockPageFlip中已经设置成最新的缓冲区了,但它有可能是空的。比如应用程序还没有开始做绘制工作,在此之前都可能发生这种情况。按照目前版本的实现,先找出所有在这个layer之下的可见区域,即利用mFlinger->mDrawingState.layersSortedByZ不断累加visibleRegionScreen;再由此计算出不会被遮盖的区域:
Region holes(clip.subtract(under));
除holes之外的所有区域,都会被“涂黑”,这是由clearWithOpenGL(holes,0, 0, 0, 1)完成的。
接下来根据当前情况调用opengl的各API接口进行必要配置,为drawWithOpenGL做最后准备工作:
void LayerBase::drawWithOpenGL(const Region& clip) const
{
const DisplayHardware&hw(graphicPlane(0).displayHardware());//这句代码我们见过几次了
const uint32_t fbHeight =hw.getHeight();//framebuffer高度
const State&s(drawingState());//即mDrawingState
GLenum src = mPremultipliedAlpha ? GL_ONE : GL_SRC_ALPHA;
if (CC_UNLIKELY(s.alpha< 0xFF)) {//非完全不透明
const GLfloat alpha =s.alpha * (1.0f/255.0f);//归一化
if(mPremultipliedAlpha) {//预乘alpha打开
glColor4f(alpha,alpha, alpha, alpha);//alpha表达方式不同
} else {
glColor4f(1, 1, 1,alpha);
}
glEnable(GL_BLEND);//需要混合
glBlendFunc(src, GL_ONE_MINUS_SRC_ALPHA);//制定混合算法
glTexEnvx(GL_TEXTURE_ENV,GL_TEXTURE_ENV_MODE, GL_MODULATE);
} else {
glColor4f(1, 1, 1, 1);//完全不透明,alpha为1
glTexEnvx(GL_TEXTURE_ENV,GL_TEXTURE_ENV_MODE, GL_REPLACE);
if (!isOpaque()) {//不是opaque,需要blend
glEnable(GL_BLEND);
glBlendFunc(src, GL_ONE_MINUS_SRC_ALPHA);//同前面s.alpha < 0xFF情况一样
} else {
glDisable(GL_BLEND);//不需要blend
}
}
/*顶点结构体*/
struct TexCoords {
GLfloat u;
GLfloat v;
};
Rect crop(s.active.w,s.active.h);
if(!s.active.crop.isEmpty()) {
crop = s.active.crop;
}
GLfloat left = GLfloat(crop.left)/ GLfloat(s.active.w);//左边缘
GLfloat top =GLfloat(crop.top) / GLfloat(s.active.h);//上边缘
GLfloat right =GLfloat(crop.right) / GLfloat(s.active.w);//右边缘
GLfloat bottom =GLfloat(crop.bottom) / GLfloat(s.active.h);//下边缘
TexCoords texCoords[4];//定义四个点
texCoords[0].u = left;/*texCoords[4],分别表示*/
texCoords[0].v = top;/*crop框的左上、左下、右下、和右上的4个顶点*/
texCoords[1].u = left;
texCoords[1].v = bottom;
texCoords[2].u = right;
texCoords[2].v = bottom;
texCoords[3].u = right;
texCoords[3].v = top;
for (int i = 0; i < 4;i++) {
texCoords[i].v = 1.0f- texCoords[i].v;
}
glEnableClientState(GL_TEXTURE_COORD_ARRAY);
glVertexPointer(2,GL_FLOAT, 0, mVertices);
glTexCoordPointer(2,GL_FLOAT, 0, texCoords);
glDrawArrays(GL_TRIANGLE_FAN,0, mNumVertices);
glDisableClientState(GL_TEXTURE_COORD_ARRAY);
glDisable(GL_BLEND);
}
对DisplayHardware的获取,我们已经讲过了,不再赘述。变量mPremultipliedAlpha表示“预乘alpha通道”,它是RGBA的另一种表达方式。比如说传统的RGBA就是(r,g,b,a),而premultiplied alpha就是(ra,ga,ba,a)。在某些场景下采用后一种方式能达到更好的效果,大家可以自行查阅相关资料了解详情。
因而当mPremultipliedAlpha为true时(这个变量的初始值就是true,当LayerBase:: initStates时,再根据eNonPremultiplied标志来判断是否启用)设置颜色:
glColor4f(alpha, alpha, alpha, alpha);
否则就是:
glColor4f(1, 1, 1, alpha);
假如当前不是完全不透明的,或者isOpaque()返回为false,那么需要开启BLEND功能。OpenglES中对应的API是glEnable(GLenum cap),参数为GL_BLEND。BLEND的目的就是通过源色和目标色的混合计算来产生透明特效,有多种混合算法可供选择,由glBlendFunc来配置。
glBlendFunc(GLenum sfactor, GLenum dfactor);
第一个参数就是源因子,后一个为目标因子。
可选值如下表所示:
表格 18glBlendFunc可选因子
| VALUE | Description |
| GL_ZERO | 使用0.0作为混合因子 |
| GL_ONE | 使用1.0作为混合因子 |
| GL_SRC_COLOR | 根据源颜色的各分量计算出混合因子 |
| GL_ONE_MINUS_SRC_COLOR | 根据(1-源颜色各分量)计算出混合因子 |
| GL_SRC_ALPHA | 根据源颜色的alpha计算出混合因子 |
| GL_ONE_MINUS_SRC_ALPHA | 根据(1.0-源颜色alpha)计算出混合因子 |
| GL_DST_ALPHA | 根据目标颜色的alpha计算出混合因子 |
| GL_ONE_MINUS_DST_ALPHA | 根据(1.0-目标颜色alpha)计算出混合因子 |
| GL_DST_COLOR | 根据目标颜色的各分量计算出混合因子 |
| GL_ONE_MINUS_DST_COLOR | 根据(1-目标颜色各分量)计算出混合因子 |
每种情况下混合因子的具体计算方法,以及blend的计算公式,可以参考官方文档描述。这里我们只要明白它的使用方法就行了。
接下来计算纹理区域的各坐标点,结果以texCoords[4]数组来表示。这样才能保证绘图结果体现在正确的区域中。一切准备就绪,最后就可以调用openglapi进行绘制了:
其中glEnableClientState(GL_TEXTURE_COORD_ARRAY)说明要处理的是纹理坐标数组;glVertexPointer(2, GL_FLOAT, 0, mVertices)指明是二维坐标,float数据类型,紧凑方式排列,顶点数组描述是mVertices(这个数组值在validateVisibility中计算,个数为4); glTexCoordPointer(2,GL_FLOAT, 0, texCoords)也是二维坐标系,float数据类型,紧凑排列,纹理的顶点数组由前面计算得到的texCoords表示。
最后,glDrawArrays(GL_TRIANGLE_FAN,0, mNumVertices)来绘制三角形。OpenGLES取消了对QUAD的支持,有GL_TRIANGLE_FAN与GL_TRIANGLE_STRIP两种三角形绘制方式。
GL_TRIANGLE_FAN:假设有N个顶点。那么第n个三角形的顶点就是(1,n+1,n+2),总共有N-2个三角形。
GL_TRIANGLE_STRIP:假设有N个顶点,也是有N-2个三角形
Ø N为奇数(odd)。那么第n个三角形的顶点是(n,n+1,n+2)
Ø N为偶数(even)。那么第n个三解形的顶点就是(n+1,n,n+2)
以这个场景为例,因为mVertices[0]-mVertices[3]分别表示左上、左下、右下、右上四个顶点(可以参见validateVisibility中的实现),那么采用这两种模式的结果如下:
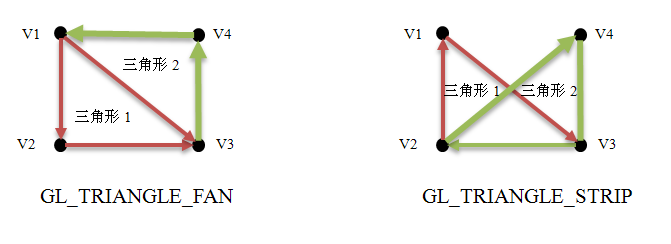
图 11‑42 三角形绘制的两种模式
1.1.1 postFramebuffer
在多缓冲区机制中,只有把显示数据写入framebuffer才能真正在物理屏幕上显示。前面几个小节的输出都是backbuffers,我们还需要最后一步——postFramebuffer。
void SurfaceFlinger::postFramebuffer()
{…
const DisplayHardware&hw(graphicPlane(0).displayHardware());
…
hw.flip(mSwapRegion);//交换前后台buffer
size_t numLayers =mVisibleLayersSortedByZ.size();
for (size_t i = 0; i <numLayers; i++) {
mVisibleLayersSortedByZ[i]->onLayerDisplayed();
}
…
}
先从opengl本地窗口的角度来想一下:
Ø queueBuffer
一旦“生产者”完成生产后,它需要把当前的buffer重新入队,以使“消费者”可以做接下来的处理
Ø dequeueBuffer
为了“生产者”可以继续下一轮的工作,它会重新deque
基本的思路就是这样子,不过Android系统将一些步骤封装到了DisplayHardware中,我们稍后会看到。
DisplayHardware::flip完成后,分别通知各可见Layer它们的内容已经显示出来了。
void DisplayHardware::flip(const Region& dirty) const
{…
mPageFlipCount++;//flip计数
if (mHwc->initCheck()== NO_ERROR) {
mHwc->commit();
} else {
eglSwapBuffers(dpy, surface);
}
…
}
分为两条路径:
(1)commit
成员变量mHwc是在DisplayHardware::init中生成的一个HWComposer对象。只要HWC_HARDWARE_MODULE_ID模块可以正常加载,且hwc_open能打开hwc_composer_device设备,那么initCheck()就返回NO_ERROR,否则就是NO_INIT。
此时我们通过HWComposer::commit来执行flip,这个函数直接调用如下硬件接口:
mHwc->set(mHwc,mDpy, mSur, mList);
set()和后面的eglSwapBuffers是基本等价的,原型如下:
int (*set)(struct hwc_composer_device *dev,hwc_display_t dpy,
hwc_surface_t sur,hwc_layer_list_t* list);
其中最后一个list必须与最近一次的prepare()所用列表完全一致。假如list为空或者列表数量为0的话,说明SurfaceFlinger已经利用OpenGL ES做了composition,此时set就和eglSwapBuffers一样。当list不为空,且layer的compositionType == HWC_OVERLAY,那么HWComposer需要进行硬件合成。
如果成功执行的话,set返回0,否则就是HWC_EGL_ERROR。可以通过eglGetError()来获得具体的error。感兴趣的读者可以自己挑选一个具体的平台实现来分析,比如三星的crespo(路径是/device/Samsung/crespo/libhwcomposer)。
(2)eglSwapBuffers
以libagl为例,这个函数又调用了如下的swapBuffers:
/*frameworks/native/opengl/libagl/Egl.cpp*/
EGLBoolean egl_window_surface_v2_t::swapBuffers()
{…
nativeWindow->queueBuffer(nativeWindow, buffer);
…
// dequeue一个新的buffer
if (nativeWindow->dequeueBuffer(nativeWindow, &buffer) == NO_ERROR) {
…
} else {
returnsetError(EGL_BAD_CURRENT_SURFACE, EGL_FALSE);
}
return EGL_TRUE;
}
这和我们一开始的推测是一致的——通过queueBuffer来入队,然后通过dequeueBuffer重新申请一个buffer以用于下一轮的刷新。关于SurfaceFlinger中所使用的这一OpenGL本地窗口,即FramebufferNativeWindow的缓冲区管理,我们在前几个小节已经分析过了,大家可以结合这里的场景再看一遍。














 1778
1778











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}