







 本文详细描述了一项智能车的设计与实现实验,涉及硬件选型、软件开发、传感器工作原理、主控板构成及遇到的问题与解决方案。重点介绍了RPR220红外传感器的工作机制和主控板的组成部分,强调了理论与实践的结合以及软件在智能车中的关键作用。
本文详细描述了一项智能车的设计与实现实验,涉及硬件选型、软件开发、传感器工作原理、主控板构成及遇到的问题与解决方案。重点介绍了RPR220红外传感器的工作机制和主控板的组成部分,强调了理论与实践的结合以及软件在智能车中的关键作用。
实验名称:智能车的设计与实现实验
实验目的:
(1)了解智能车的整体结构和工作原理
(2)综合运用所学知识,提高动手能力
(3)培养创新意识和团队合作能力
(4)通过所学设计和制作,一个可以自动识别路径与自动行驶的智能小车
实验环境:
(1)硬件:MC9S12XS128主控模块、传感器模块、电源模块、电机驱动模块、速度检测模块、辅助调试模块。
(2)软件:Code Warrior for S12是面向以HC1和S12为CPU的单片机嵌入式应用开发软件包,包括集成开发环境IDE、处理器专家库、全芯片仿真、可视化参数显示工具、项目工程管理器、c交叉编译器、汇编器、链接器以及调试器。
实验原理:
(1)RPR220红外传感器
由一个红外线发光二极管和光敏三极管组成,如图8-11所示。加电工作时,二极管向三极管的反射表面发射红外线。光敏三极管如果接收到反射回的红外线则导通,反之则关断。
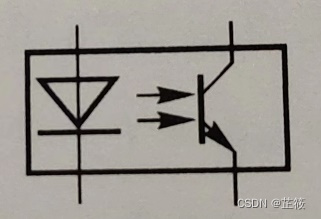
图8-11 RPR220红外传感器电路原理图
(2)MC33886电机
(3)舵机
舵机控制电路如图8-13所示。由7806提供6V电压,使用DG128单片机的PWM1,输入PWM波占空比越小,左转角度越大;反之,右转角度越大。舵机的中心点必须由实验确定。
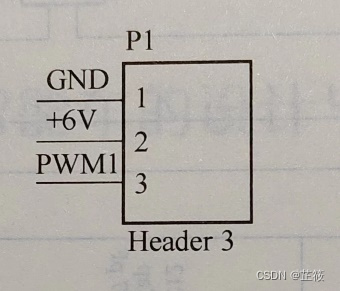
图8-13舵机控制电路
(4)拨码开关
拨码开关电路(如图8-14所示)可以实现无程序下载的参数修改。
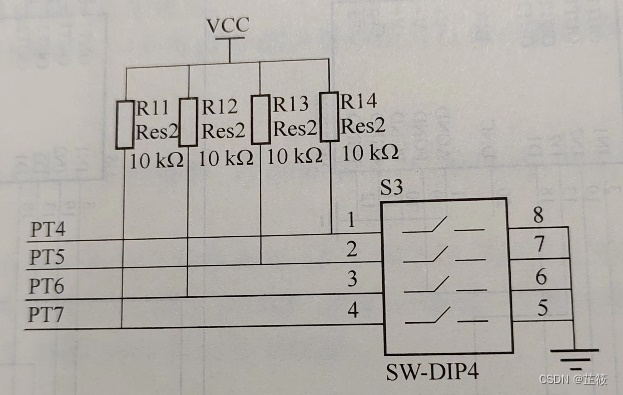
图8-14 拨码开关电路
实验步骤:
1.模型车介绍
模型车结构如图8-15所示。

(1)路径检测装置
使用多个红外传感器(红外对管)或者一个摄像头,对路径进行识别。本实验使用红外对管。
(2)前后轮
前轮负责转向,后轮负责动力。
(3)舵机
PWM波输人,驱动电压6 V,控制左右转向,具体参数可参阅相关技术手册。
(4)直流电机
驱动电压7.2 V,无负荷转速为12000 r/min,无负荷电流为最大630m A,详细参数可参相关技术手册。
(5)镍镉电池
标称电压7.2 V,注意正确充放电,不合理充电会缩减电池寿命,不合理放电会降低电池量。
(6)电机驱动板
独立的PCB,安装在直流电机上方,由PWM控制。
(7)主控板
主要包括最小系统版插口,电源电路(输出7.2V、6V和5V),电机驱动电路,拨码开关,蛇机、电机、摄像头、传感器等插头。
2.车模组装
模型车组装如图8-16所示。
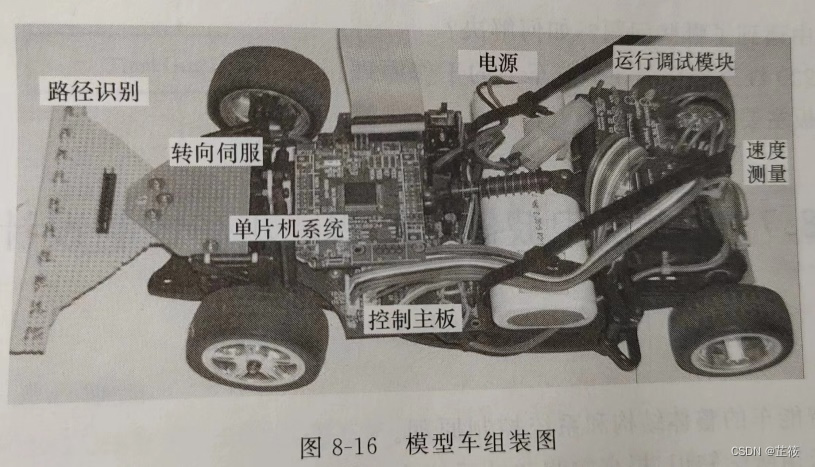
(1)安装各个零部件
包括舵机的安装、对管加固连接部分的安装等。将多个对管焊接到一个PCB上,横向排川在智能车的前方,红外发射头与地面距离适当。将主控板通过螺钉固定在底盘上,将码盘固在传动齿轮上。
(2)连接电路
电机连接到MC33886的OUT1和OUT2以提供驱动电流。舵机通过插头连接PWM1、V和GND。电池通过插头固定到主控板电源。路径检测板通过插头接人VCC和GND,11 络模拟量信号接到单片机的A/D引脚。最小系统板编程完毕后直接插到主控板。
3.设计程序
(1)路径的检测与判断
11个对管传输11个模拟量值,用实际模拟量减去门限,若大于0(白底)则为1,若小于0则为0,转化为数字量,生成11个数的数组,通过数组内0的位置判断路径所在。
(2)位置标号
设定位置标号规则,根据位置标号指定控制策略,设定转向方法。
(3)速度控制
直线车道,匀速运行,入弯减速,以免冲出跑道。
实验总结:
一、制作中遇到了哪些问题?如何解决?
(1)硬件选择问题:选择合适的硬件对于智能车的实现至关重要。例如,微控制器、传感器、电机等,需要仔细考虑其性能、尺寸、功耗以及成本等方面。
(2)软件开发问题:智能车的控制和数据处理需要高效的软件。如何编写稳定、高效的代码是个挑战。同时,软件的集成和调试也可能耗费大量时间。
(3)车辆定位与导航:智能车需要能够识别自身位置和导航。这涉及到路径规划、障碍物检测与避障等问题。
(4)电源管理:智能车的移动性和连续工作能力受限于电源。如何优化电源管理,提高能源效率,是一个需要解决的问题。
(5)系统集成:将各个组件(硬件和软件)集成到一个紧凑且可靠的系统中是一项挑战。这需要细致的规划和有效的团队协作。
解决这些问题的方法有:
(1)进行充分的研究,了解各种硬件的性能和最佳实践,以便选择最适合项目需求的组件。
学习并应用最佳的软件开发实践,例如使用适当的算法和数据结构,进行充分的测试和调试。
使用成熟的定位和导航算法,例如PID控制器、卡尔曼滤波器等,并结合实际情况进行调整优化。
(2)优化电源管理,通过降低功耗和提高能量效率来延长工作时间。例如,只在必要时唤醒系统或使用能量高效的硬件组件。
(3)制定详细的系统集成计划,确保每个组件都满足要求,并在系统级别进行充分的测试和验证。
二、RPR220红外传感器在智能车上的工作原理?
RPR220红外传感器在智能车上主要用于检测停车位上是否有汽车。其工作原理是利用光电效应,当有汽车进入传感器检测区域时,汽车会遮挡光线,导致传感器输出信号发生变化,从而判断停车位上是否有汽车。
三、主控板主要包括哪几部分?
(1)微处理器或单片机:主控板的核心部分,用于控制整个系统的运作。微处理器或单片机通过读取输入信号,执行程序,然后输出控制信号,对整个系统进行控制。
(2)存储器:存储程序和数据的地方,可以是RAM、ROM、EEPROM等类型的存储器。
(3)输入/输出接口:用于连接外部设备和主控板之间的通信。输入接口用于接收外部设备的信号,输出接口用于发送信号到外部设备。
(4)时钟和复位电路:用于提供系统的时间基准和初始化系统。
(5)电源电路:用于提供系统所需的电源,通常需要经过稳压、滤波等处理,以确保系统的稳定运行。
(6)其他辅助电路:如驱动电路、信号放大电路、滤波电路等,用于支持主控板的正常运行和控制功能。
四、心得体会
首先,我明白了设计智能车需要明确应用场景和需求,选择合适的硬件和软件,为后续的设计打下坚实的基础。在实验中,我学习了如何设计硬件电路,这让我深刻体会到了理论与实践的结合。
其次,我了解到编写软件程序是实现智能车各种功能的关键。通过编写程序,我们可以实现自动控制、传感器数据处理等功能。在这个过程中,我深刻体会到了代码的重要性以及软件对硬件的强大控制力。
此外,测试和调试阶段让我更加深入地理解了智能车的原理和实现方法。当智能车出现问题时,我们需要耐心地排查问题,不断优化和改进设计方案。这个过程虽然繁琐,但却让我学到了很多宝贵的知识和经验。
最后,这个实验不仅让我学到了很多知识,更让我体会到了实践的乐趣和挑战。我深刻体会到智能车设计与实现的复杂性和挑战性,但正是这些挑战,让我更加坚定了在智能交通领域继续探索和研究的决心。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









