






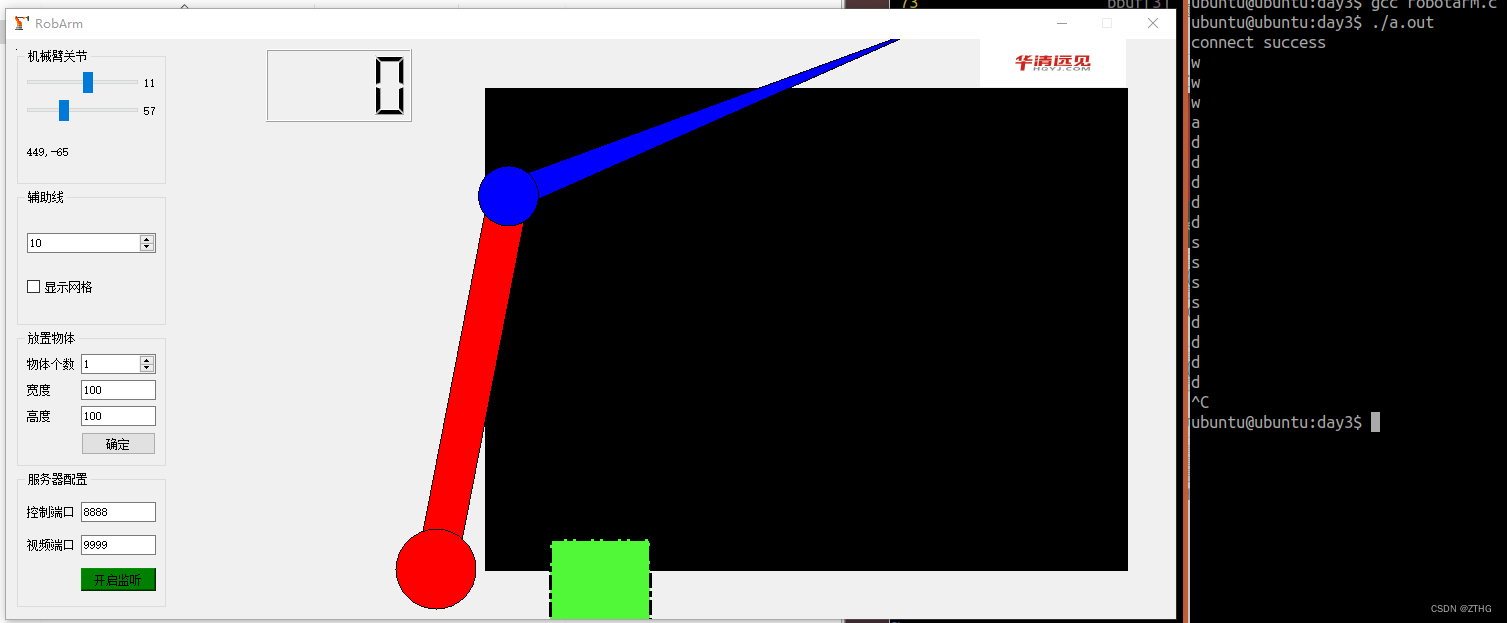
机械臂测试
#include <myhead.h>
#define IP "192.168.101.33"
#define PORT 8888
#define CLI_IP "192.168.101.41"
#define CLI_PORT 9999
int main(int argc, const char *argv[])
{
//创建套接字
int cfd=socket(AF_INET,SOCK_STREAM,0);
if(cfd==-1)
{
perror("socket error");
return -1;
}
//链接服务器
struct sockaddr_in sin;
sin.sin_family=AF_INET;
sin.sin_port=htons(PORT);
sin.sin_addr.s_addr=inet_addr(IP);
if(connect(cfd, (struct sockaddr*)&sin, sizeof(sin))==-1)
{
perror("connect error");
return -1;
}
printf("connect success\n");
//数据收发
char rbuf[5] = {0xff, 0x02, 0x00, 0x10, 0xff};
unsigned char bbuf[5] = {0xff, 0x02, 0x01, 0x11, 0xff};
send(cfd, rbuf, sizeof(rbuf), 0); //初始化红色臂展
send(cfd, bbuf, sizeof(bbuf), 0); //初始化蓝色臂展
while(1)
{
//终端输入指令
char x;
scanf("%c",&x);
while(getchar()!=10);
//进行判断
switch(x)
{
case 'w':
if(rbuf[3]<90&&rbuf[3]>=-90)
{
rbuf[3]+=0x05;
send(cfd, rbuf, sizeof(rbuf), 0);
break;
}
else if(rbuf[3]==90)
{
printf("红色机械臂已达正向最大角\n");
break;
}
case 's':
if(rbuf[3]>-90&&rbuf[3]<=90)
{
rbuf[3]-=0x05;
send(cfd, rbuf, sizeof(rbuf), 0);
break;
}
else if(rbuf[3]==-90)
{
printf("红色机械臂已达反向最大角\n");
break;
}
case 'd':
if(bbuf[3]>=0&&bbuf[3]<180)
{
bbuf[3]+=0x05;
send(cfd, bbuf, sizeof(bbuf), 0);
break;
}
else if(bbuf[3]==180)
{
printf("蓝色机械臂已达正向最大角\n");
break;
}
case 'a':
if(bbuf[3]>=0&&bbuf[3]<=180)
{
bbuf[3]-=0x05;
send(cfd, bbuf, sizeof(bbuf), 0);
break;
}
else if(bbuf[3]==0)
{
printf("蓝色机械臂已达反向最大角\n");
break;
}
default:
printf("输入有误\n");
break;
}
}
//关闭套接字
close(cfd);
return 0;
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









