






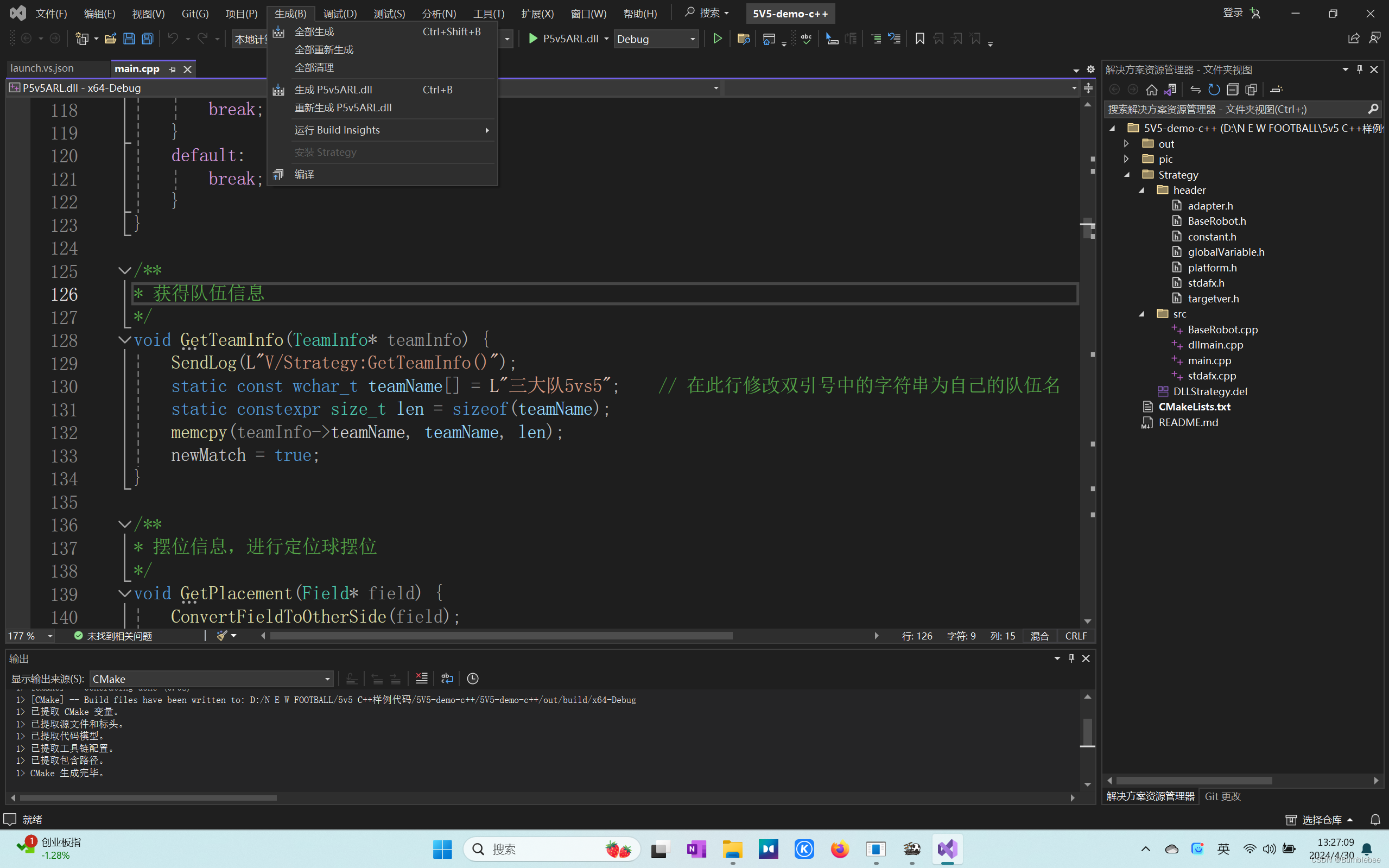
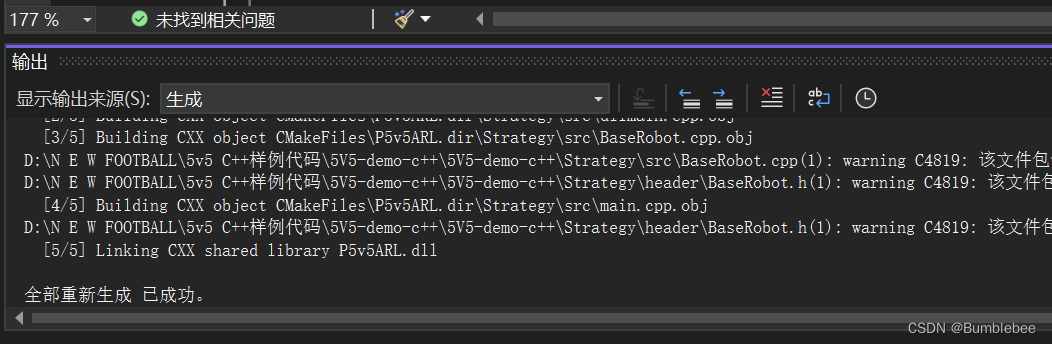
首先,写完c++代码后,点击 "生成---全部重新生成" 。如果下边输出框显示生成成功的话,就会在原c++代码文件的目录中生成一个dll文件
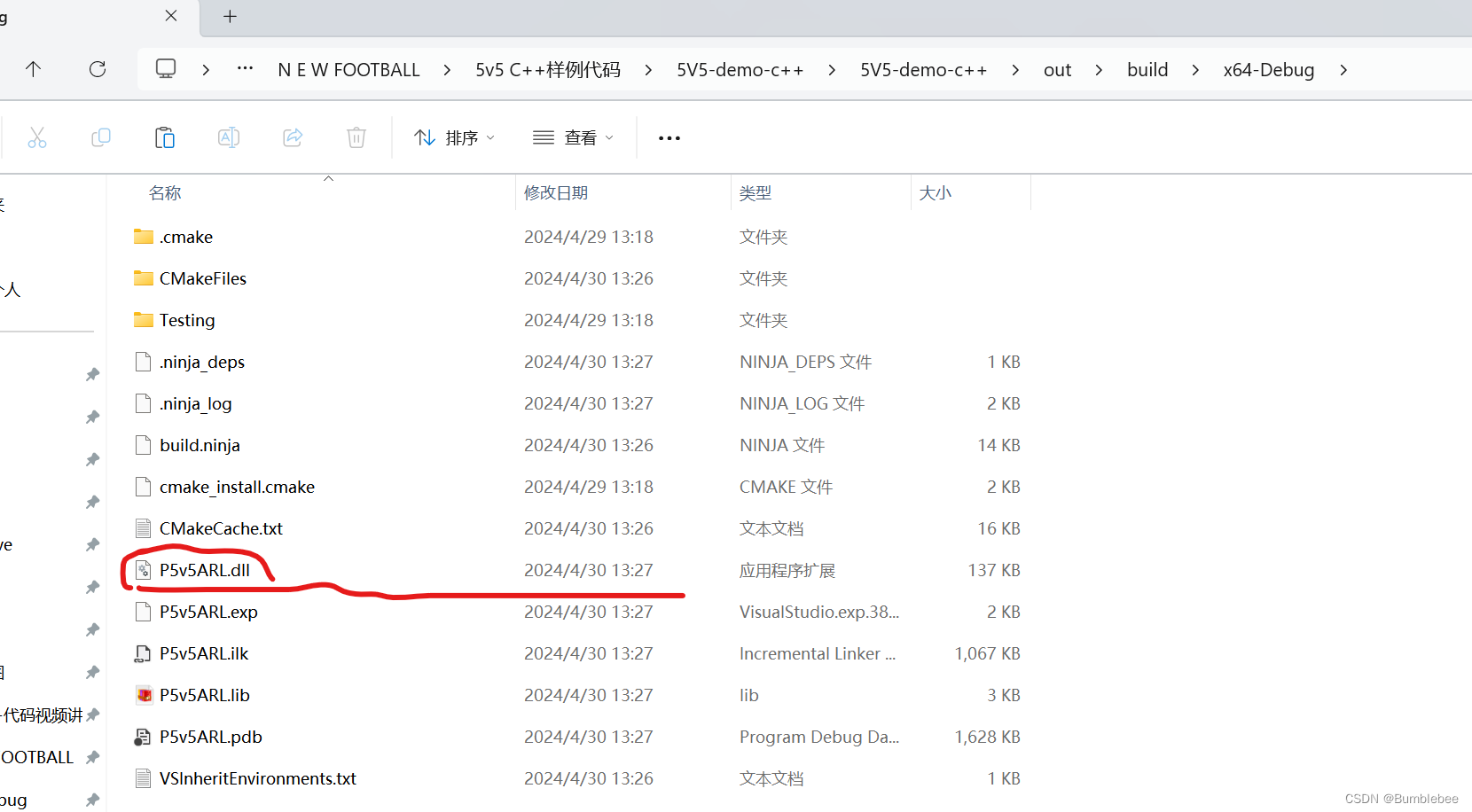
生成的dll文件路径如下:
dll生成成功后,打开simuro平台,在“启动“一栏中点击一次打开平台,点击两次打开64位加载器(因为是对抗,要同时传入两个策略)。
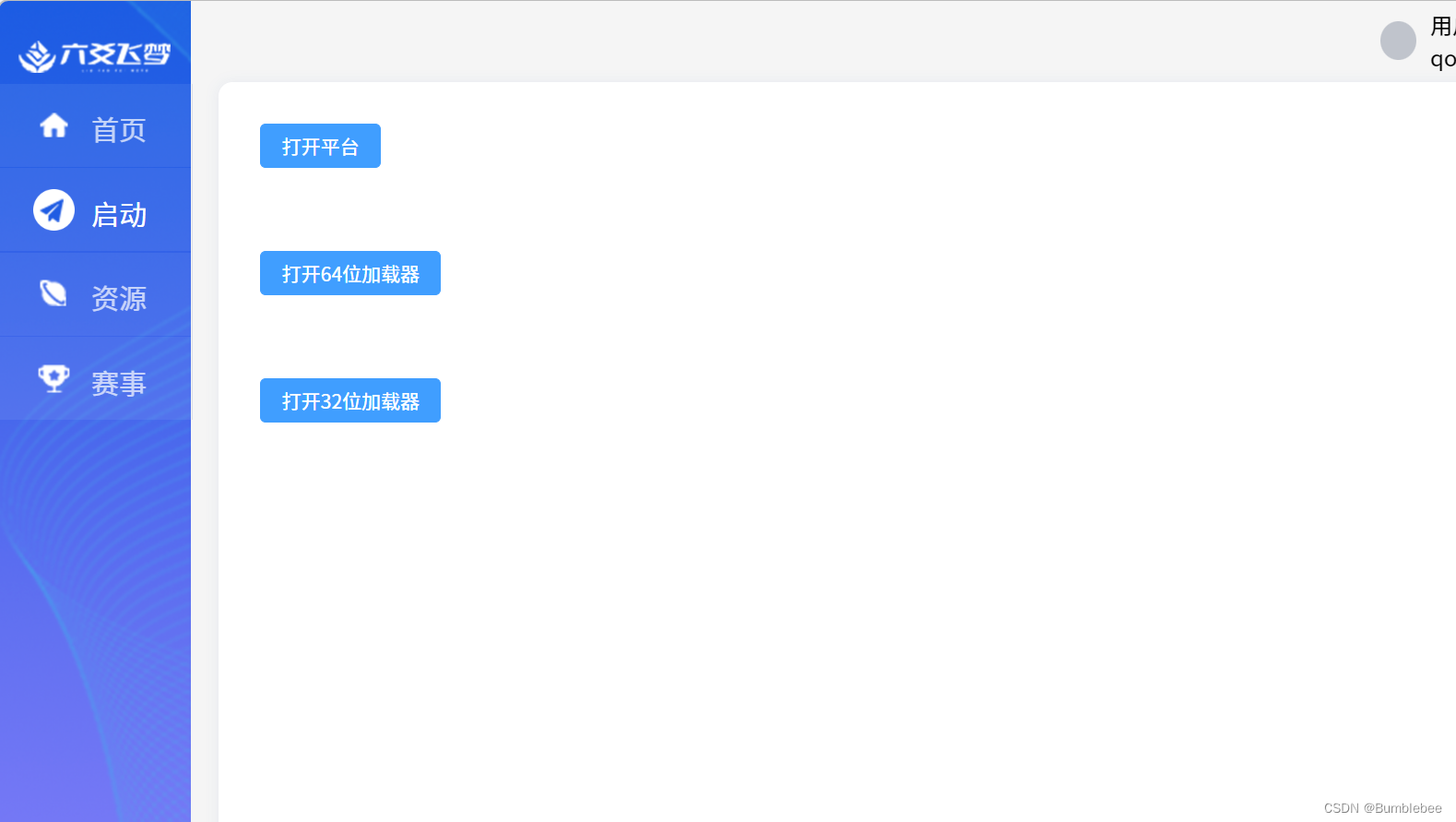
打开后长这样:
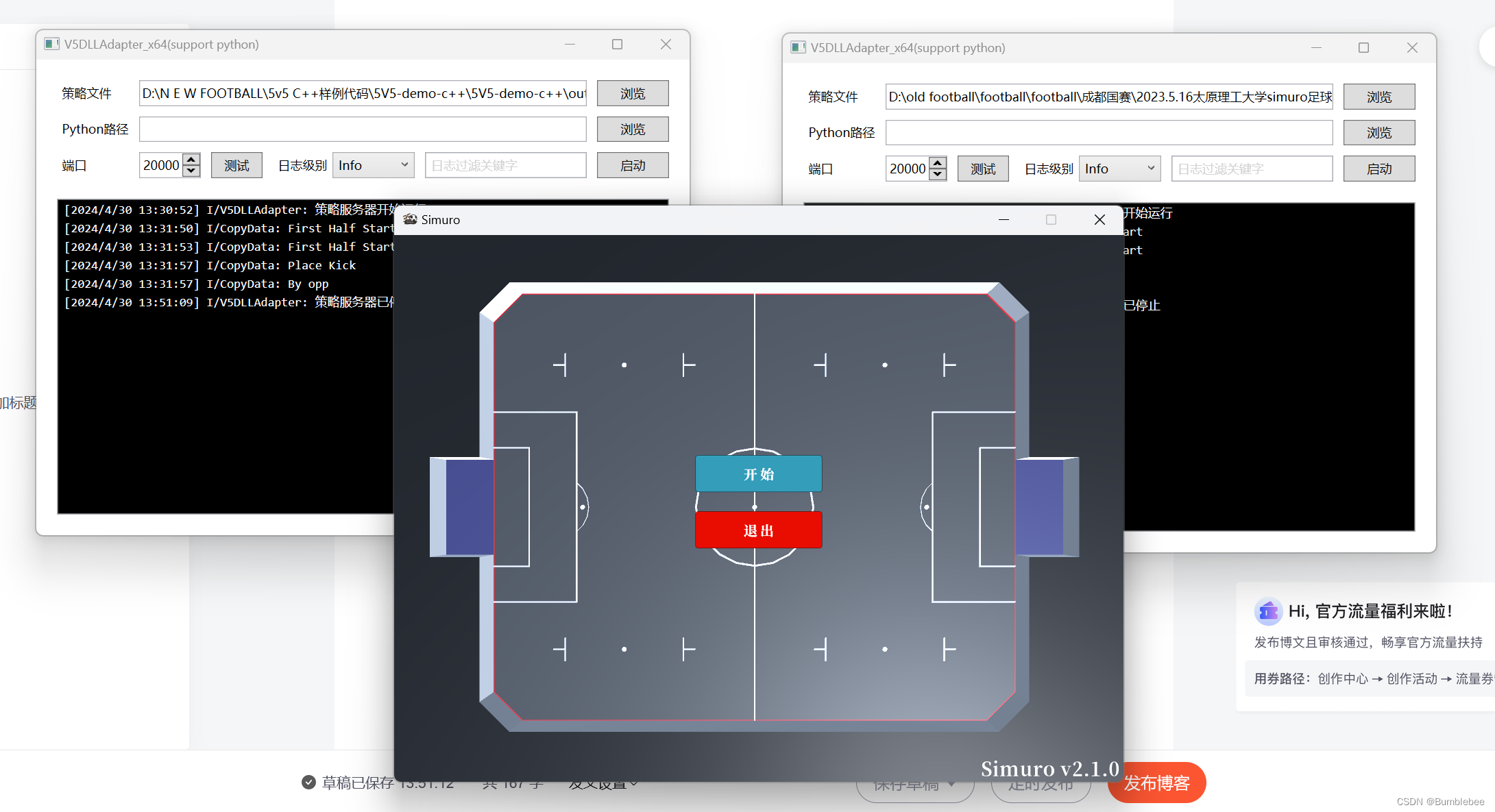
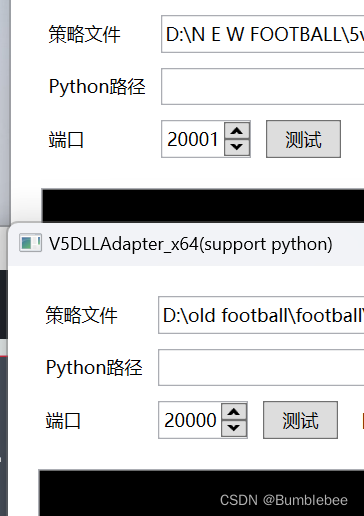
接下来就是传入策略,点击”浏览“,选择你生成好的dll,在另一个加载器里选择你要对抗的策略(例如初级/中级样例策略)。在选好策略后,一定要记得将其中一个端口调成20001。并点击两个”启动“。
策略启动成功后会显示:

接下来就是启动平台,点击”开始“后会出现这个页面,如果大家在比赛模式里选择”足球赛“或者”多人点球“(5v5选择前者,点球选择后者) 选好后点击”加载策略“

策略加载成功后会出现以下页面,就是显示出了两个队的名称及”等待新的比赛“:

接下来Esc退出,点击”新的比赛---开始“这样就开始对抗了,如果想停止,按Esc即可
注意:停止对抗并退出后,如果想修改代码,要先把两个策略停止了,再去修改代码,改好后就按照上述步骤重新生成dll,加载策略。不停止的话就无法重新生成

















 6055
6055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









