






 本文详细介绍了队列数据结构的概念、特点,以及如何实现一个循环队列。通过实例展示了队列的入队、出队操作,以及在实际应用中的场景。
本文详细介绍了队列数据结构的概念、特点,以及如何实现一个循环队列。通过实例展示了队列的入队、出队操作,以及在实际应用中的场景。
-
实验目的:
1、理解队列数据结构的概念和特点。
2、熟悉队列的应用场景和算法实现。
二、实验内容(实验题目与说明)
实现了一个循环队列,具有功能:
- 初始化队列。
- 判断队列是否为空。
- 判断队列是否已满。
- 入队。
- 出队。
在 main() 函数中,先初始化队列,然后依次将元素 'a'、'b'、'c' 入队,再出队一个元素,输出该元素,接着将元素 'd'、'e'依次入队,最后输出出队序列,即元素 'b'、'c'、'd'、'e'。
三、算法设计(核心代码或全部代码)
#include <stdio.h>
#include <stdlib.h>
#define max 10
typedef struct {
char data[max];
int front;
int rear;
} Queue;
// 初始化
void initQueue(Queue* q) {
q->front = q->rear = 0;
}
// 判断队列是否非空
int Empty(const Queue* q) {
return q->front == q->rear;
}
// 判断队列是否已满
int isQueueFull(const Queue* q) {
return (q->rear + 1) % max == q->front;
}
// 入队
void enqueue(Queue* q, char elem) {
if (isQueueFull(q)) {
printf("队满\n");
return;
}
q->data[q->rear] = elem;
q->rear = (q->rear + 1) % max;
}
// 出队
char dequeue(Queue* q) {
if (Empty(q)) {
printf("队空\n");
return '\0';
}
char elem = q->data[q->front];
q->front = (q->front + 1) % max;
return elem;
}
int main() {
Queue q;
initQueue(&q);
// 判断队列是否非空
printf("队列是空的吗? %s\n", Empty(&q) ? "Yes" : "No");
// 进队元素a,b,c
enqueue(&q, 'a');
enqueue(&q, 'b');
enqueue(&q, 'c');
printf("出队: %c\n", dequeue(&q));
// 进队元素d,e
enqueue(&q, 'd');
enqueue(&q, 'e');
// 输出出队序列
printf("出队: ");
while (!Empty(&q)) {
printf("%c ", dequeue(&q));
}
printf("\n");
return 0;
}
-
运行与测试(测试数据和实验结果分析)
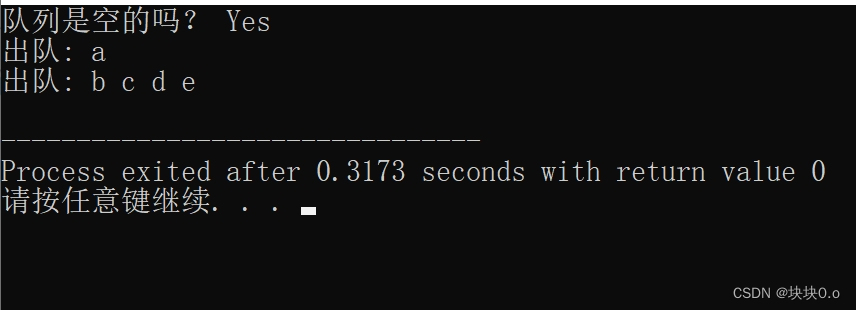
首先判断队列是否为空,然后三个元素a、b、c依次入队,然后a出队,d、e入队,然后全部出队,即显示b c d e,体现了队列先入先出的特点。如果出队输出结果时没能把入队的元素都输出出来,原因是一开始#define max 3,将符号常量 max 定义为 3但是入队d、e后有四个元素,队满了元素e就无法入队,出队时自然也看不见元素e
-
总结与心得
在进行队列数据结构实验的过程中,我对队列的概念和特点有了更深入的理解。队列是一种先进先出的数据结构,类似于排队等待服务的场景。队列的实现可以使用数组或链表,具体选择取决于实际需求。队列在实际应用中有广泛的用途,适用于需要按照先后顺序处理任务或数据的场景。通过实验,我深刻体会到了队列的优点和局限性。队列的入队和出队操作具有常数时间复杂度 O(1),因此在处理大量数据时表现出良好的性能。但是,队列的随机访问受限,只能从队首或队尾进行操作。

















 4624
4624

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









