






一种使用元启发式算法获得的加权矩阵设计线性二次调节器控制器的新方法。
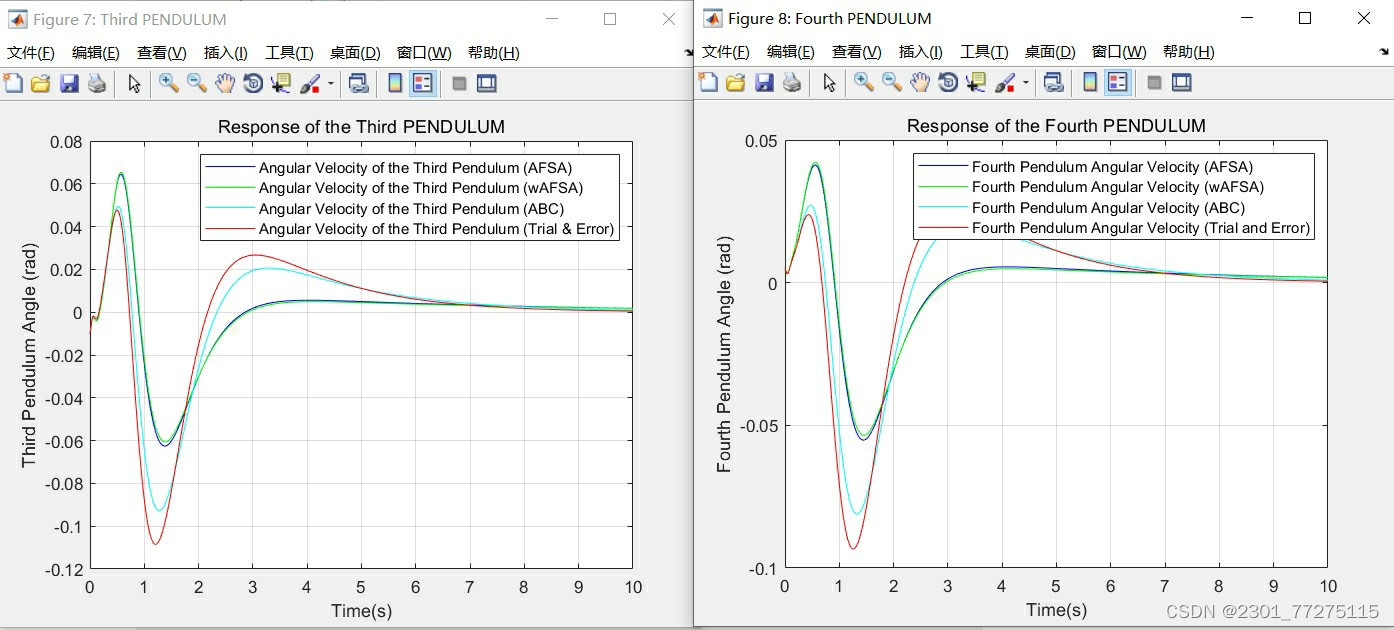
设计的控制器用于获得动态非线性四级倒立摆(QIP)的最优控制,加权矩阵的优化值用于稳定四级倒立系统。
matlab
ID:69100696603115873

一种使用元启发式算法获得的加权矩阵设计线性二次调节器控制器的新方法。
设计的控制器用于获得动态非线性四级倒立摆(QIP)的最优控制,加权矩阵的优化值用于稳定四级倒立系统。
matlab
ID:69100696603115873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























