






概述
日常应用中常用通信方式一般有串口通信和网口通信和CAN通信等,现使用两台N80系列PLC对串口通信和网口通信进行演示,(本台PLC无CAN通信功能,因此后续有机会再进行补充)
目录
一、Modbus RTU串口通讯
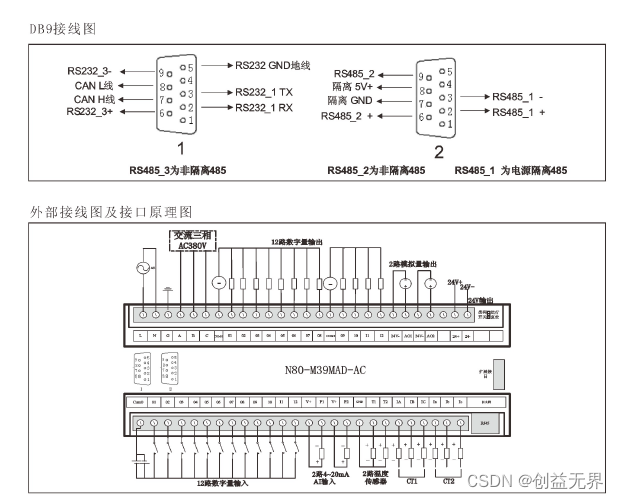
(一)、硬件接线
此处选用第一路485(串口2)进行通讯,将两台PLC的RS485_1进行连接,下图所示2中的2、3点
(二)、程序编写
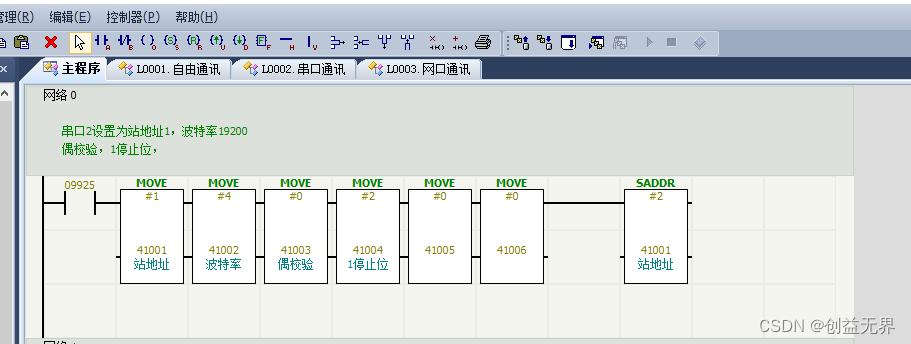
硬件接线选用了串口2,因此在从站程序编写时,我们将串口2进行初始化设置,将串口2设置为站地址1,从站不需要编写数据读取接收程序。
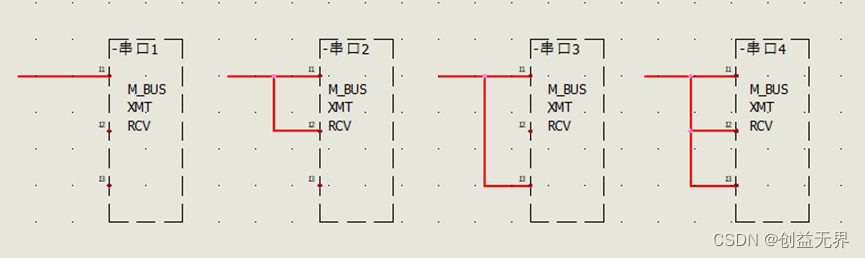
主站程序中我们使用M_BUS功能块时,因硬件接线接了串口2,因此程序功能块中连接上中节点进行编写,我们在主站中将写到从站的数据读取上来,这样就可以很直观的观察到数据发送是否正确了

二、自由通讯
(一)、硬件接线
硬件接线使用485接口,主站的第二路485接口,接从站的第一路485口,即主站RS485_2接从站RS485_1,主站使用串口3进行通讯。参考上图
(二)、程序编写
(1)、主站程序
因为从站只设置了的串口2的参数,因此主站Modbus通讯和自由通讯此处就直接与从站的串口2进行通讯演示,主站使用串口3与从站通讯,因此功能块使用上下节点。此程序中主站只发送数据,不做接收。

(2)、从站程序
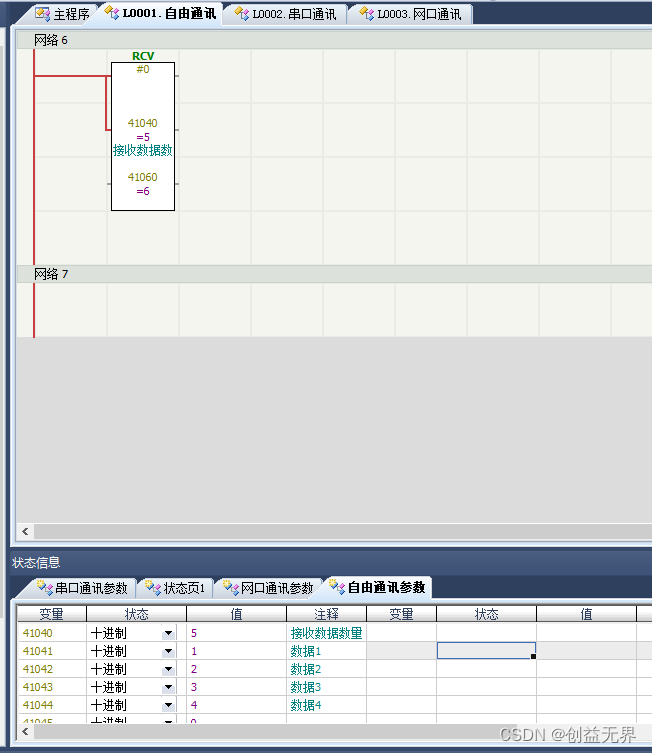
从站使用串口2进行通讯,功能块使用上下节点。
三、网口通讯
(一)、硬件接线
使用网线进行连接即可。
(二)、程序编写
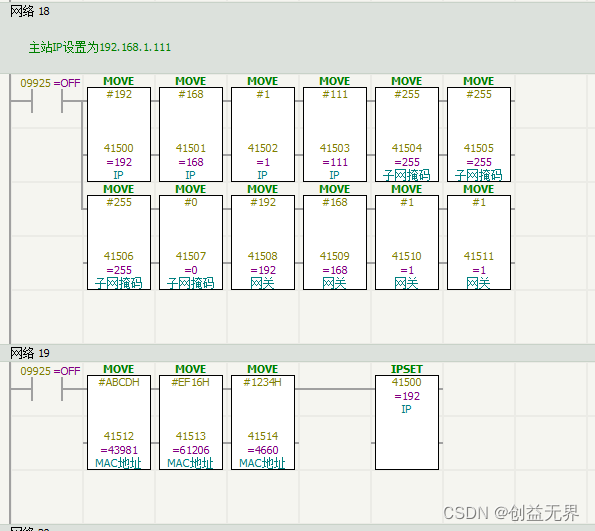
(1)、主站IP设置
无特殊要求,直接按功能块编写即可。
(2)、从站IP设置
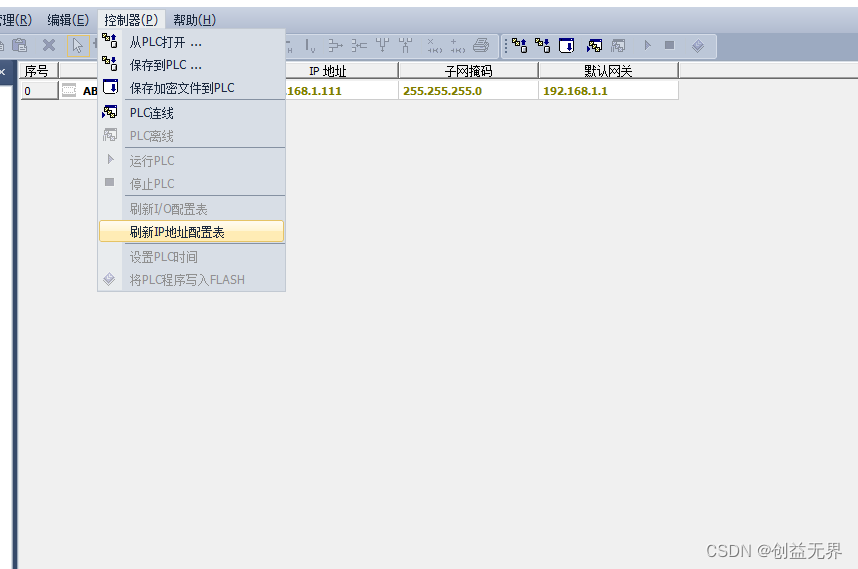
可以如主站IP一样编程序,也可以直接在线修改。下面介绍在线修改IP,
在网络连接中禁用其他网络,打开软件点击刷新IP地址配置表直接修改即可。
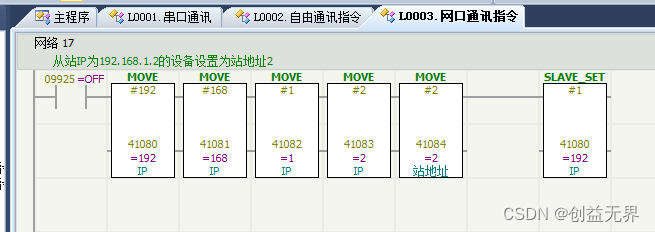
(3)、设置从站地址
主站程序中将IP为192.168.1.2的从站地址设置为1
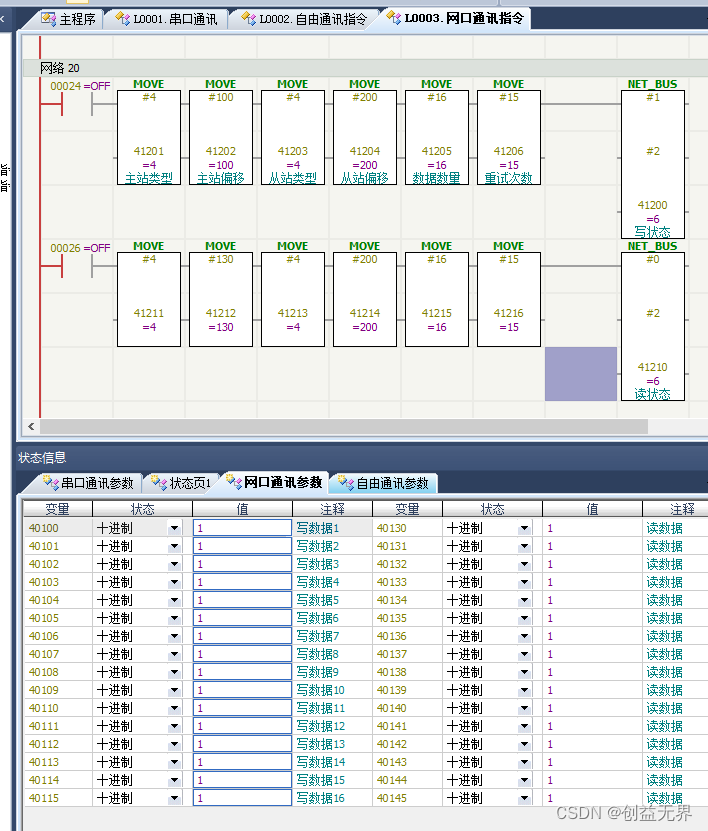
(4)、主站数据数据收发
将主站写入从站的数据读取上来,可以看到数据正常。
四、CAN通讯
本台PLC无CAN通信功能,后续有机会再补充















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









