







源码下载地址
项目介绍
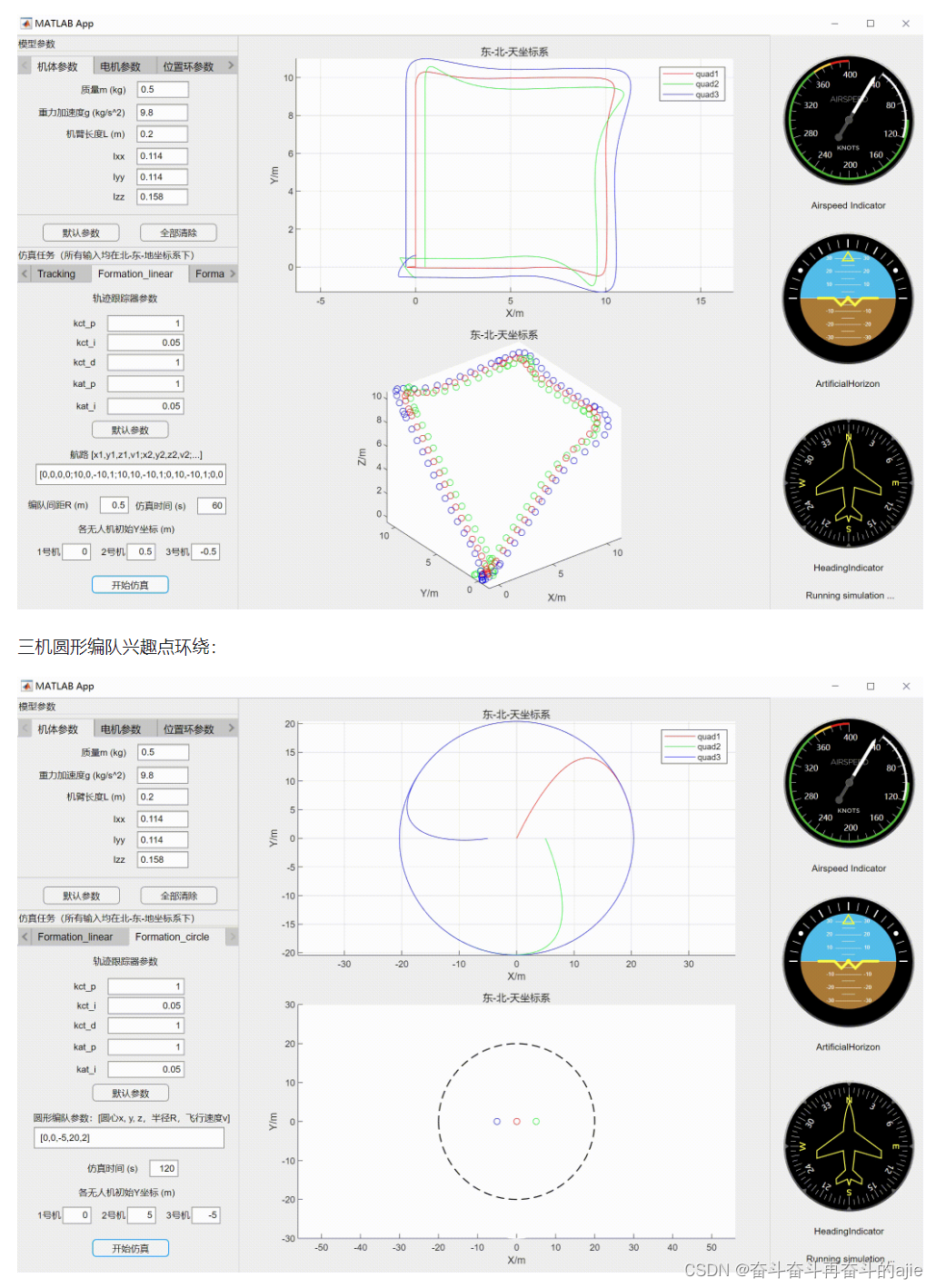
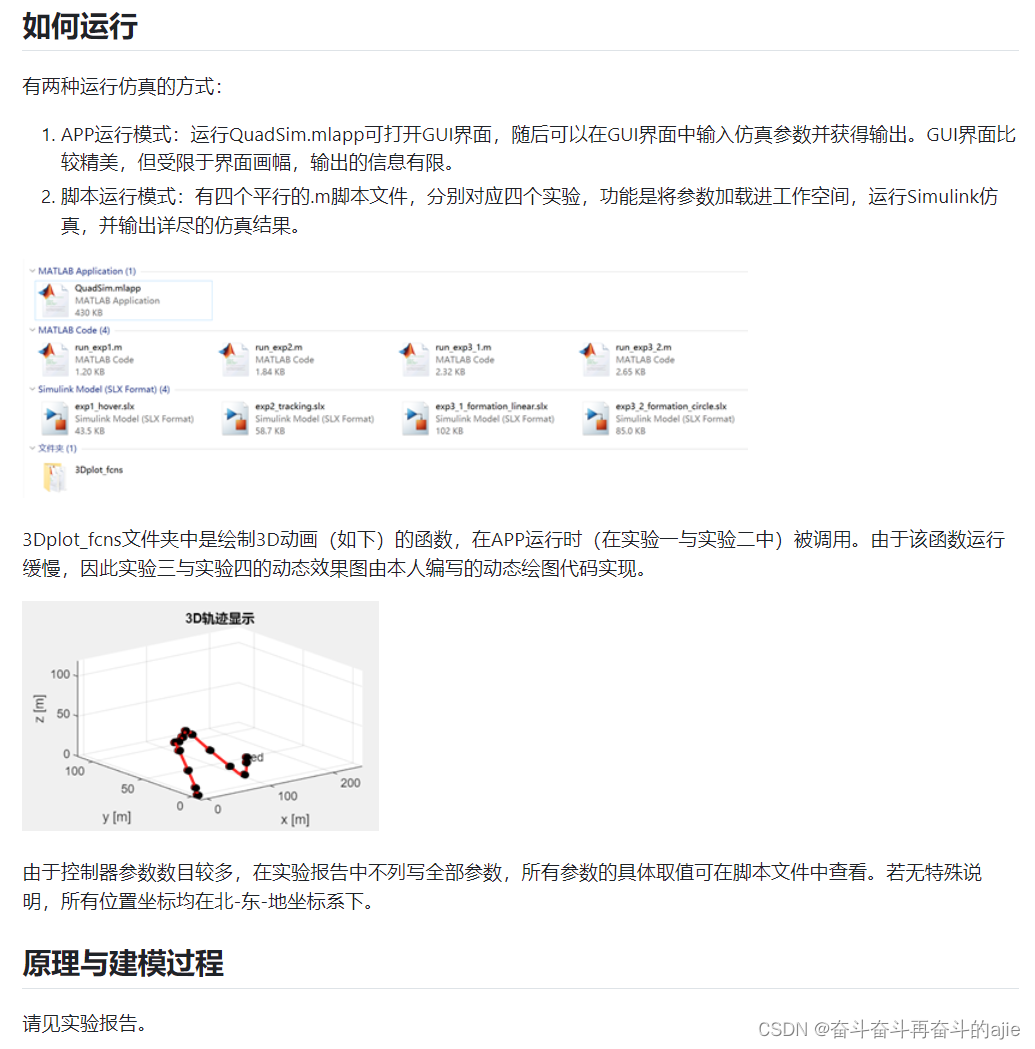
北京航空航天大学《四旋翼飞行器建模仿真综合实验》,提供了MATLAB APP运行与脚本运行两种方式,实现四旋翼控制仿真。仿真功能:定点悬停、航路跟踪、编队飞行。
三机“一”字编队航路跟踪:
实验内容
四旋翼飞行器建模:在Simulink中建立四旋翼飞行模型,能正确对飞行器在力和力矩作用下的线运动、角运动进行 6DOF仿真;
定点悬停控制实验:基于四旋翼飞行器模型,实现对指定3D空间点的悬停控制;建立GUI界面,能为四旋翼飞行器输入参数并观察仿真飞行轨迹;分析控制误差;在可能的情况下改进控制算法,提高控制精度;
航路跟踪控制实验:基于四旋翼飞行器模型,实现对指定任意指定的 3D空间航路进行跟踪;实现GUI界面,能交互式输入一组航路点,并绘制 3D的飞行轨迹分析控制误差;在可能的情况下改进控制算法,提高控制精度
编队跟踪控制实验:基于四旋翼飞行器模型,建立三机线性与圆形编队,沿指定路径编队飞行;要求实现GUI界面,绘制编队飞行轨迹,分析控制误差;在可能的情况下改进控制算法,提高控制精度。
项目功能
界面预览
项目备注
1、该资源内项目代码都经过测试运行成功,功能ok的情况下才上传的,请放心下载使用!
2、本项目适合计算机相关专业(如计科、人工智能、通信工程、自动化、电子信息等)的在校学生、老师或者企业员工下载学习,也适合小白学习进阶,当然也可作为毕设项目、课程设计、作业、项目初期立项演示等。
3、如果基础还行,也可在此代码基础上进行修改,以实现其他功能,也可用于毕设、课设、作业等。
下载后请首先打开README.md文件(如有),仅供学习参考, 切勿用于商业用途。
















 350
350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











