







—.系统概述
系统使用的模块有AT89C51单片机+LCD1602显示+HC-SR04超声波测距模块。
本次设计的系统使用AT89C51单片机作为主控,通过超声波测距模块检测前方障碍物的实时距离,并将检测到的距离数据发送到LCD1602上进行显示,这种装置多用于液位检测、障碍物距离检测等,具有较广的应用范围。超声波测距的准确且安全,不需要进行接触式的测距。
二.仿真概述
1.使用LCD1602显示屏显示超声波检测的距离。
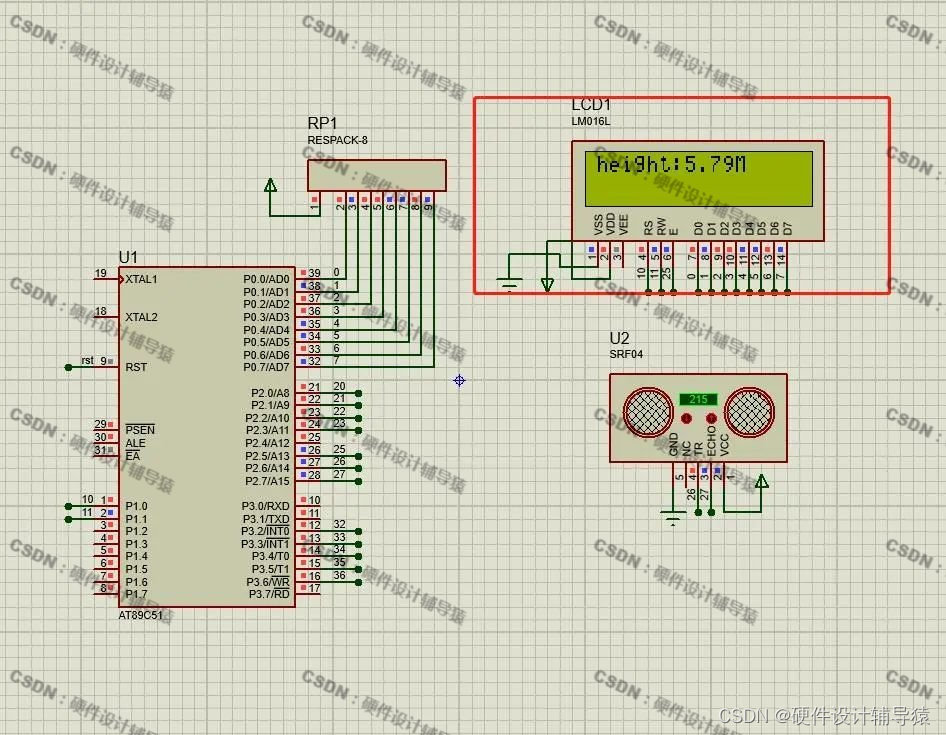
2.使用HC-SRO4超声波测距模块检测与障碍物的实时距离。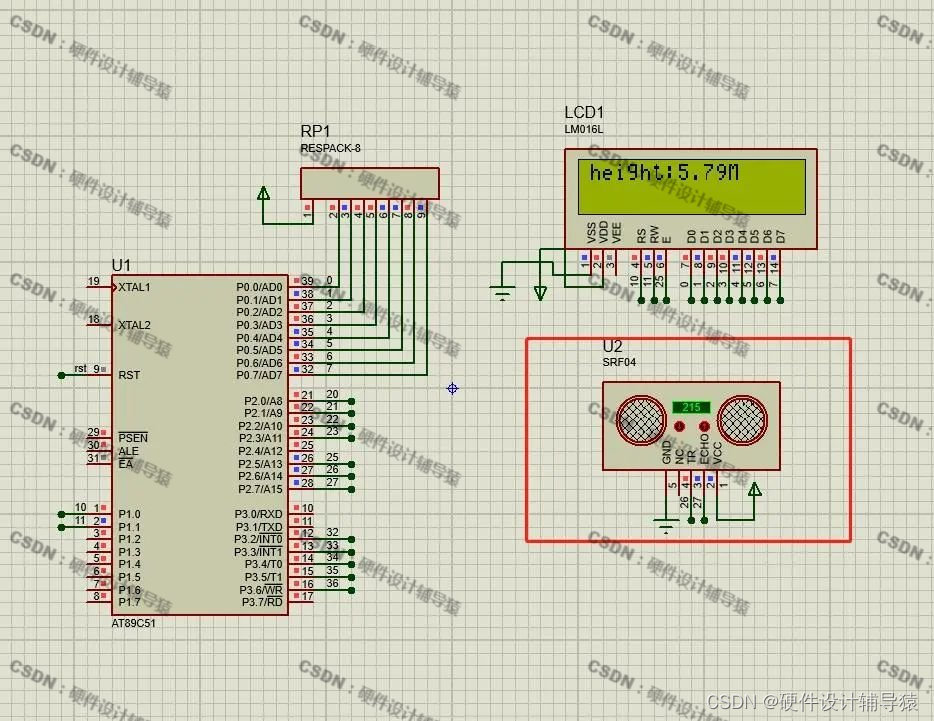
三.程序设计
使用Keil 51进行程序设计,打开Proteus时程序是默认烧录的状态,如果没有烧录点击AT89C51单片机并将程序导入就能运行系统(程序文件是后缀为hex的文件)。
————————————————
版权声明:本文为CSDN博主「硬件设计辅导猿」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/XCHardware/article/details/132117851














 1796
1796











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









