






哈希表的定义
哈希表(Hash Table)是一种基于哈希函数实现的高效数据结构,用于存储键值对(Key-Value)。它通过哈希函数将键(Key)映射到一个较小范围的整数值(通常是数组的索引),从而快速定位存储位置。哈希表的核心在于通过哈希函数实现快速的插入、查找和删除操作,其平均时间复杂度接近 O(1),在处理大量数据时表现出极高的效率。
线性探测的定义
线性探测(Linear Probing)是解决哈希冲突的一种方法。当多个键通过哈希函数映射到同一个位置时,会发生冲突。线性探测通过依次检查后续位置(即线性地向后探测)来解决冲突。具体来说,如果位置 i 被占用,则检查位置 i+1,如果仍然被占用,则检查 i+2,依此类推,直到找到一个空闲位置来存储数据。
线性探测的特点
-
高效性:
-
哈希表的插入、查找和删除操作的平均时间复杂度接近 O(1),在数据量较大时,性能优势明显。
-
线性探测通过简单的线性扫描解决冲突,实现逻辑简单,易于理解。
-
-
动态性:
-
哈希表可以根据数据量动态调整大小。当负载因子(即表中已存储的元素数量与表容量的比值)达到一定阈值时,可以通过扩容操作增加表的容量,从而保持高效的性能。
-
-
聚集问题:
线性探测的一个主要缺点是容易产生聚集(Clustering)。当多个键映射到相邻的位置时,线性探测会导致大量连续的位置被占用,从而增加后续插入和查找的开销。 -
例如,如果多个键映射到同一个位置,线性探测会依次检查后续位置,导致大量连续的位置被占用,形成“聚集”。
-
-
-
简单性:
-
线性探测的实现逻辑简单,不需要复杂的数学运算或额外的数据结构支持。它通过简单的线性扫描解决冲突,易于实现和维护。
-
线性探测的实现
以下是线性探测在哈希表中的实现逻辑:
-
插入操作:
-
计算键的哈希值,确定初始位置。
-
如果该位置已被占用,则依次检查后续位置,直到找到空闲位置。
-
将键值对存储到空闲位置,并更新表的大小。
-
-
查找操作:
-
计算键的哈希值,确定初始位置。
-
如果该位置的键与目标键不匹配,则依次检查后续位置,直到找到目标键或空闲位置。
-
-
删除操作:
-
查找目标键的位置。
-
删除目标键。
-
负载因子
负载因子(Load Factor)是衡量哈希表使用效率的一个重要指标,它定义为哈希表中已存储的元素数量与哈希表总容量的比值。负载因子的计算公式为:
负载因子=哈希表的总容量 / 已存储的元素数量。
对于插入查找删除来说,都会涉及到向哈希数组后进行查找,负载因子小的时候,查找到的空白格快,所以我们会关注哈希表中的负载因子和容量。
下面是C语言实现的代码:
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
typedef struct hashtab
{
int *date;//数组指针
int size;//现有数据的量
int hk;//哈希函数
double a;//负载因子
int capacity;//总容量大小
}HASH;
HASH* hash_init(int Capacity,double a1);
int add(HASH *hash,int num);
int delete(HASH *hash,int num);
int serch(HASH *hash,int num);
int isfull(HASH *hash);
void expand(HASH *hash);
int main(int argc, char const *argv[])
{
HASH *hash=hash_init(5,0.6);
add(hash,1);
add(hash,4);
add(hash,14);
add(hash,15);
add(hash,11);
add(hash,3);
add(hash,10);
add(hash,19);
add(hash,13);
add(hash,16);
add(hash,22);
add(hash,17);
add(hash,26);
add(hash,18);
return 0;
}
HASH* hash_init(int Capacity,double a1)
{
HASH *hash=malloc(sizeof(HASH));
hash->hk=Capacity;//对13取余
hash->size=0;
hash->capacity=Capacity;
hash->date=malloc(sizeof(int)*hash->capacity);
memset(hash->date,-1,sizeof(int)*hash->capacity);
hash->a=a1;
return hash;
}
int add(HASH *hash,int num)
{
printf("尝试存储%d: cap=%d\n", num, hash->capacity);
if (isfull(hash)==1)//如果负载因子超过目标值
{
expand(hash);//扩容
}
int pos=num%hash->hk;//取余作为哈希哈数
int i=pos;
if (hash->date[i]==-1)//如果目标位置没有数值,则则直接插入
{
hash->date[i]=num;
hash->size++;
printf("存储成功,size:%d\n",hash->size);
return 1;
}
else//目标位置有数值,向下寻找空位置
{
do{
if (hash->date[i]==-1)
{
hash->date[i]=num;
hash->size++;
printf("存储成功,size:%d\n",hash->size);
return 1;
}
i=(i+1)%hash->hk;
}while (i!=pos);//直到回到原位停止,表示没有空位,无法插入
}
return -1;
}
int delete(HASH *hash,int num)
{
int pos=num%hash->hk;//取余后的位置
int i=pos;
do//原位置是该数据则直接删除,如果没有就向后寻找
{
if (hash->date[i]==-1)return -1;
if (hash->date[i]==num)
{
hash->date[i]=-1;
hash->size--;
return 1;
}
i=(i+1)%hash->hk;
}while (i!=pos);//如果本位置没有
return -1;
}
int serch(HASH *hash,int num)
{
int pos=num%hash->hk;//取余后的位置
int i=pos;
do//原位置是该数据则直接返回,如果没有就向后寻找
{
if (hash->date[i]==-1)return -1;
if (hash->date[i]==num)
{
return i;
}
i=(i+1)%hash->hk;
}while (i!=pos);//如果本位置没有
return -1;
}
int isfull(HASH *hash)
{
double s=(double) hash->size/hash->capacity;//实际负载因子
return s >= hash->a ? 1 : 0;//如果大于目标负载因子,返回1
}
void expand(HASH *hash) {
int old_capacity = hash->capacity;
int *old_date = hash->date;
hash->capacity *= 2;
hash->hk = hash->capacity; // 更新哈希函数参数
hash->date = malloc(sizeof(int) * hash->capacity);
memset(hash->date, -1, sizeof(int) * hash->capacity);//重新分配空间
hash->size=0;
// 重新插入所有元素,手动更新size
for (int i = 0; i < old_capacity; i++) {
if (old_date[i] != -1) //旧数组位置不为空
{
int pos = old_date[i] % hash->hk;
int j = pos;
while (hash->date[j] != -1) {
j = (j + 1) % hash->hk;
}//找到可以插入的位置
hash->date[j] = old_date[i];//插入
hash->size++;//更新大小
}
}
printf("扩容,新容量:%d\n", hash->capacity);
free(old_date);//释放旧空间
}运行结果:
因为我们的大小更新是在插入以后,所以对负载因子的计算是之后一次的。
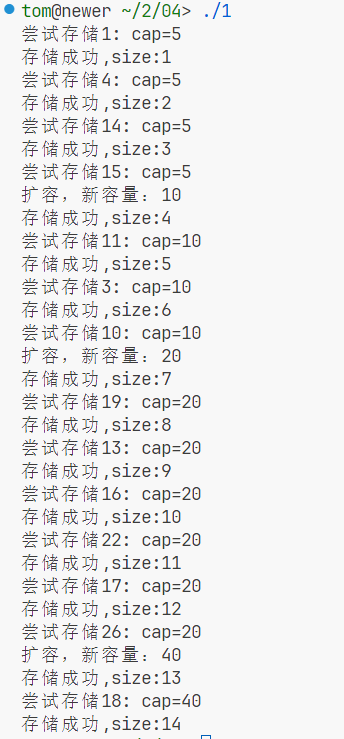
本结果主要关注扩容,大家可以试一下其他功能。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









